本文主要是介绍ROS——自定义话题消息和使用方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
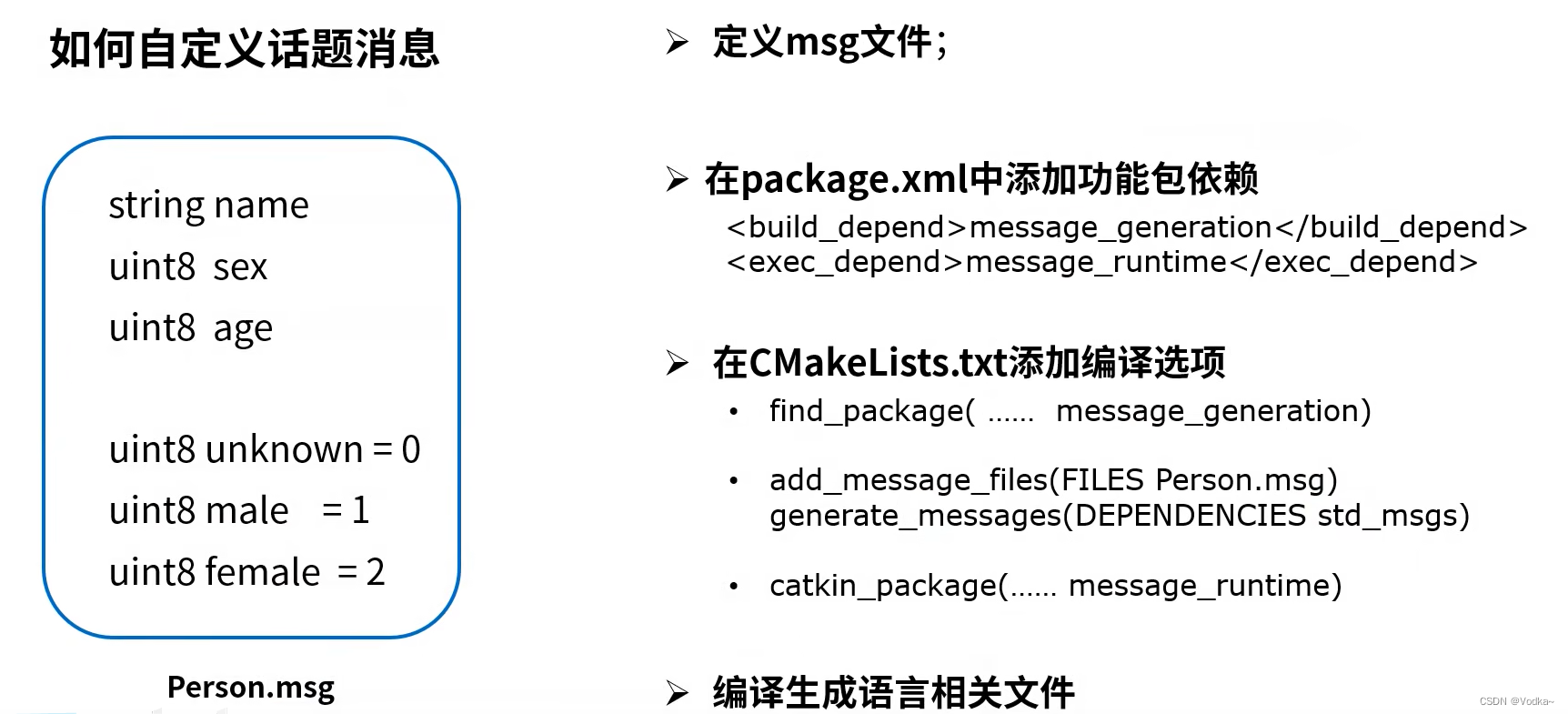
定义Person话题
定义Person发布者
/*** 该例程将发布/person_info话题,自定义消息类型: test_topic::Person*/#include <ros/ros.h>
#include <test_topic/Person.h>
//包含的头文件,ros相关的头文件,及自定义头文件int main(int argc, char **argv)
{// ROS节点初始化,利用ros::init完成节点初始化,要设置节点的名字(这里设名字为person_publisher),注意节点名字不要重复;argc, argv是main函数里输入的参数,主要来完成一些可以通过输入的参数来设置一些初始化的属性,一般默认情况下这些属性没有什么配置,基本上只有这节点的名字//这句话就是告诉ros master,这个节点来了,要启动了ros::init(argc, argv, "person_publisher");// 创建节点句柄;主要用来管理ros相关的api一些资源的,比如创建发布者,创建api调用,都需要用到节点的句柄来做调用的,故主用来管理节点的资源的ros::NodeHandle n;// 创建一个Publisher,该程序的主指令的,发布名为/person_info的topic,消息类型为test_topic::Person,队列长度10//ros::Publisher person_info_pub(定义一个发布者,后面需要让她做一些简单的初始化) = n.advertise<test_topic::Person>(所要发布的消息的数据的类型)>(括号里初始化内容分两个内容,前者参数,发布的话题的话题名,而且和所订阅的话题名匹配,否则管道不同,数据就会传输到其他地方。现在我们要在名为/person_info话题里发布消息 后者参数10,是队列长度,主要表示在发布者Publisher发布数据的时候,底层可能没有办法来得及快速相应该发布的频率,就会把所要发布的数据先放到一个队列里来,然后不断往外发布。举例,比如publisher发布一秒钟一万次,会有一个队列,先把一万次存放到队列里面来,然后再根据实际发送的能力从队列缓存里往外发送数据,如果底层发送能力还是太弱了,ros会默认把时间最老的数据(即最先进队的数据)除去,永远保存10个数据是最新的数据,这时就会有一些掉数据的情况)ros::Publisher person_info_pub = n.advertise<test_topic::Person>("/person_info", 10);// 设置循环的频率ros::Rate loop_rate(1);int count = 0;while (ros::ok()){//进入while循环,封装数据并且发布出去,延时满足所设置的频率// 初始化test_topic::Person类型的消息内容test_topic::Person person_msg;person_msg.name = "vodka";person_msg.age = 22;person_msg.gender = test_topic::Person::male;// 发布消息person_info_pub.publish(person_msg); ROS_INFO("Publish Person Info, name:%s\n age:%d\n gender:%d ",person_msg.name.c_str(),person_msg.age,person_msg.gender); // 按照循环频率延时loop_rate.sleep();}return 0;
}定义订阅者
// 该例程将订阅 /person_info 话题,自定义消息类型test_topic::Person
#include <ros/ros.h>
#include "test_topic/Person.h"//接收到订阅的消息后,会进入消息回调函数
void PersonInfoCallback(const test_topic::Person::ConstPtr& msg){//打印接收到的信息ROS_INFO("Subscribe Person Info: name:%s\n age:%d\n gender:%d",msg->name.c_str(),msg->age,msg->gender);
}int main(int argc , char **argv){//初始化ros节点ros::init(argc,argv,"person_subscriber");//创建节点句柄ros::NodeHandle n;//创建一个Suscriber,订阅名为 /turtle1/pose 的topic,注册回调函数ros::Subscriber person_info_sub = n.subscribe("/person_info",10,PersonInfoCallback);//循环等待回调函数ros::spin();return 0;
}
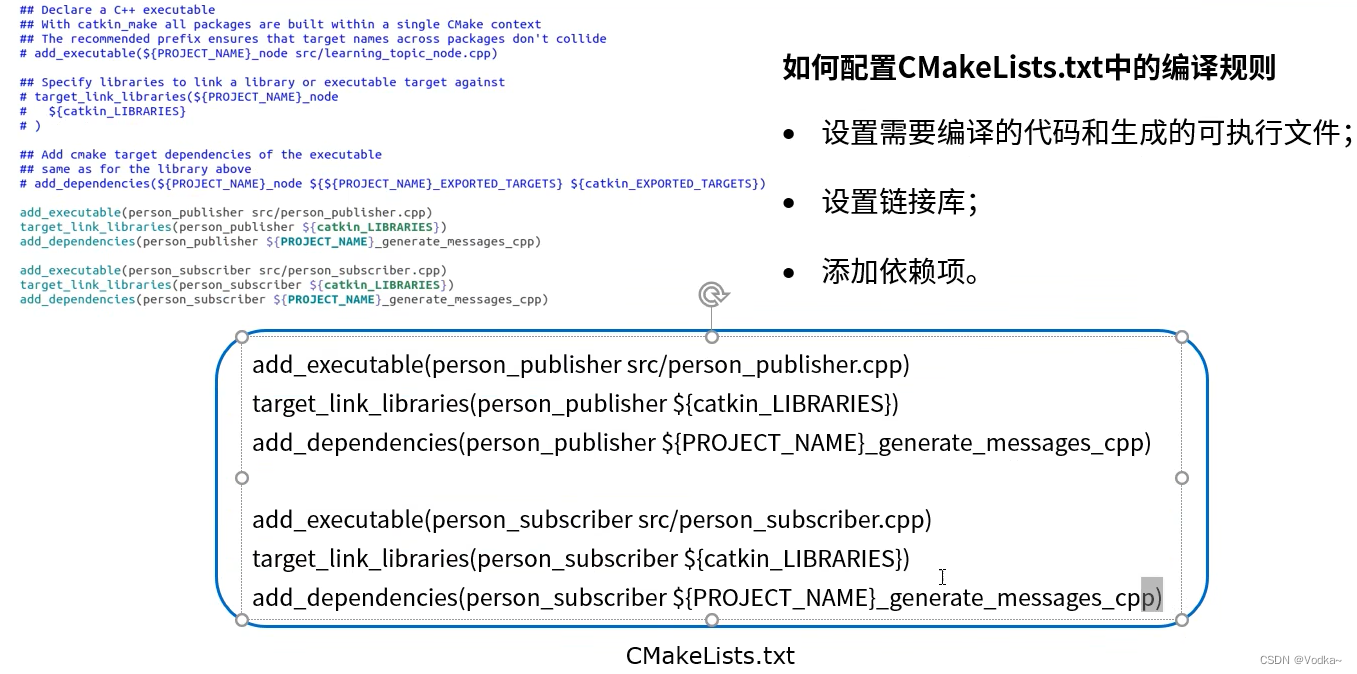
添加相关依赖(generate_messages:某些代码功能需要动态生成,添加依赖信息)
person_publisher 和 person_subscriber 通过节点管理器建立了ROStcp之后,节点管理器关闭也不会影响两者正常运行
这篇关于ROS——自定义话题消息和使用方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







