航向专题

电子设备网络新航向:SEO携手新媒体,打造强势品牌曝光
电子设备企业怎么有效地进行网络推广,把业务越做越好呢?根据湖南竑图网络13年从事互联网优化经验来看,可以给大家分享几点,希望对各位企业老板和高管有一定作用! 一、关键词优化。搜索关键词依旧是传统企业获取精准流量的重要途径。记住一个词:精准流量(精准客户)。现在很多平台,像以主动推送为主的某音,种草分享为主的某书,百度等以搜索为主的精准流量对比于某音、某书的泛流量更有价值。所以关键词优化非常重

无名创新开源飞控利用GPS数据航向对准开源代码
无名创新开源飞控利用GPS数据航向对准开源代码: #define acc_sync_cnt 5 void GPS_Azimuth_Update_Method1(uint8_t flag) { if(flag==0) return; //下面利用到角公式求解误差方位角,先方位角误差正切值 float x1=0,y1=0,x2=0,y2=0,molecule=0,denomi

ROS学习记录:用C++实现IMU航向锁定
前言 获取IMU数据的C++节点 在了解了如何获取到IMU的姿态信息(链接在上面)后,接下来尝试实现让一个节点在订阅IMU数据的时候,还能发布运动控制指令,使机器人能对姿态变化做出反应,达到一个航向锁定的效果。 一、实现步骤 二、开始操作 1、打开一个终端,输入cd ~/catkin_ws1/src,进入工作空间 2、输入 code . 打开VScode 3、在VScode

战略规划驱动企业成长,指明航向并增强竞争优势
战略规划是企业发展的航标,它不仅为企业提供明确的方向,还增强了企业的竞争优势。在当今快速变化的市场环境中,一个明确且可行的战略规划显得尤为重要。本文将从战略规划的定义、重要性、制定过程以及实施策略等方面,探讨如何通过战略规划驱动企业成长。 首先,我们要明确什么是战略规划。战略规划是一个系统性的过程,它涉及对企业内部和外部环境的深入分析,以确定企业的使命、愿景和目标。通过战略规划,企业能够明确自身的

超潜力 JAM 链何以超越中继链,引领 Polkadot 2.0 新航向?
2024 年 4 月 18 日,Polkadot 创始人 Gavin Wood 在迪拜 Token 2049 活动上宣布了一项波卡生态的重大进展—— JAM 灰皮书发布!JAM 协议的诞生与发展开辟了波卡生态的另一种发展路径,它将替代当前中继链的技术角色,以模块化、简约化的技术设计助力波卡生态项目创新探索。 活动上,Web3 基金会专业人士还介绍 JAM 协议规范将于年底完成,由 Fell
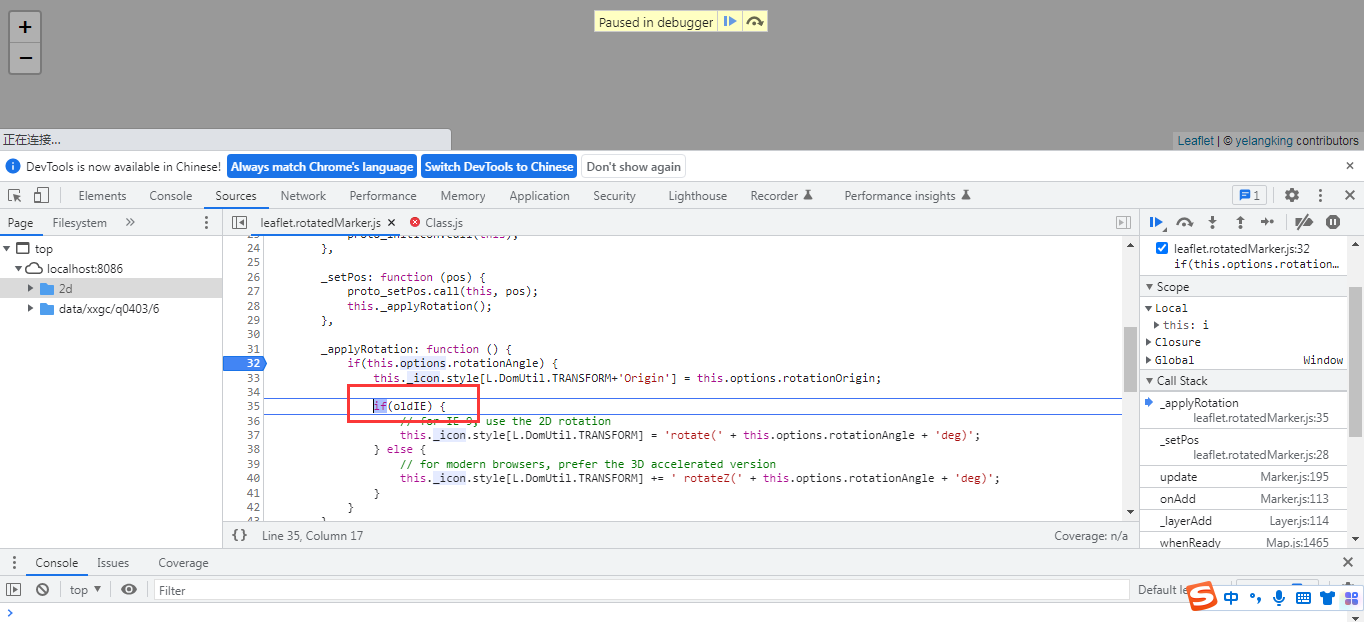
使用Leaflet.rotatedMaker进行航班飞行航向模拟的实践
目录 前言 一、Leaflet的不足 1、方向插件 2、方向控制脚本说明 二、实时航向可视化实现 1、创建主体框架 2、飞机展示 3、位置和方位模拟 三、成果及分析 1、成果展示 2、方向绑定解读 总结 前言 众所周知,物体在空间中的运动(比如飞行、跑步、开车、轮渡)等等,随着时间的推移,不仅仅是时空位置在不断的发生变化,同时其方向也是在发
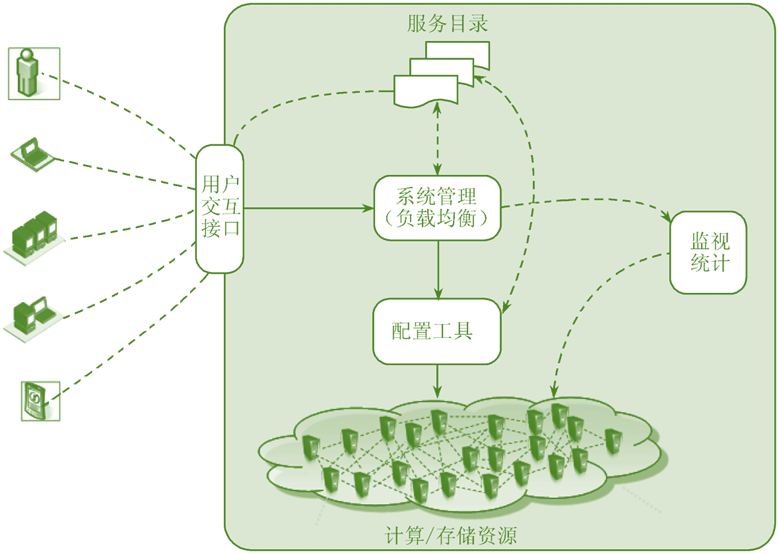
云端巨擘:大数据与云计算的时代航向
文章目录 大数据时代大数据特点(4v+1C大数据与云计算的关系 云计算云计算定义云计算特点云计算分类(服务类型)云计算实现机制云计算体系结构云计算的管理中间件层 大数据时代 大数据定义:海量数据或巨量数据,其规模巨大到无法通过目前主流的计算机系统在合理时间内获取、存储、管理、处理并提炼以帮助使用者决策。 大数据特点(4v+1C 价值密度低(Value):在成本可接受的条件下

【船舶航向】模糊控制船舶航向仿真【含Matlab源码 3073期】
⛄一、模糊控制船舶航向仿真 对于模糊控制船舶航向仿真,你可以采用以下步骤: 1、确定系统模型:首先,需要了解船舶的动力学特性,包括质量、惯性、推进力等。根据船舶的特性,建立船舶的数学模型,例如使用牛顿力学方程或航行动力学方程。 2、设计模糊控制器:基于船舶的数学模型,设计模糊控制器来控制船舶的航向。模糊控制器是一种基于模糊逻辑的控制方法,它可以处理不确定性和模糊性的问题。通过设定适当的输入
抢滩新基建 华为、BAT航向有何不同
中国软件网出品 作者 陈杨 ------ 新基建无疑是今年上半年要被“说烦”的话题。 中国软件网在上周名为“说烦了的新基建 北广上建得有何不同”一文中也写道,从2月份中央多次明确加快新基建建设进度,到5、6月份地方政府印发新基建行动方案,这代表着新基建越来越“接地气”。 也不得不说,正是中央以及地方政府层面相关政策的下达,使得企业敢于布局新基建。但对企业而言,新基建这一概念无疑过于宽泛,纵然整

GPS 定位信息分析:航向角分析及经纬度坐标转局部XY坐标
GPS 定位信息分析(1) 从下面的数据可知,raw data 的提取和经纬度的计算应该是没问题的 在相同的经纬度下, x 和 y 还会发生变化,显然是不正确的 raw data:3150.93331124 11717.59467080 5.3latitude: 31.8489 longitude: 117.293 heading_angle: 5.3raw data:3150.9333

PID控制在自动驾驶中的应用举例(二)航向控制
上一篇中介绍了使用PID进行车速控制,控制目标相对简单,如果加入转向的目标,任务复杂程度都会有所增加。 对于环境的配置与之前类似,不再赘述。 from matplotlib import pyplot as pltfrom collections import dequeimport numpy as npimport gymimport highway_env%matplotlib
双天线模式下的航向角计算
如果你有主天线和从天线的经纬度坐标,并想计算航向角,通常你需要计算主天线到从天线的方向。这可以通过以下步骤实现: 计算主天线和从天线的经纬度差值,即从天线相对于主天线的位置。 使用差值经纬度计算方向角。 以下是用C++实现的示例代码: #include <iostream>#include <cmath>struct GPSCoordinate {double latitude;

ardupilot罗盘数据计算航向
目录 文章目录 目录摘要1.数据特点2.数据结论1.结论2.结论 摘要 本节主要记录ardupilot 根据罗盘数据计算航向的过程。 如果知道了一组罗盘数据,我们可以粗略估计航向:主要后面我们所说的X和Y都是表示的飞机里面的坐标系,也就是X前Y右边,如果按照罗盘坐标系Y实际在左边。 我们用的都是下面的表示的数据都是用上面这个图,主要注意一点就是 实际的飞机Y在右边就可以,

关于利用超核HI600D获取UTC时间,经纬度,东经,地面速度,地面航向,日期。
本文利用stm32f103vet6开发板+超核HI600D获取一系列信息 1.串口数据 当我们用type-B的数据线连接超核600D,与电脑连接时,打开串口助手,会获取一系列的信息 如图所示: 这是未定位的原始数据,我们想要得到有效数据,得在空旷环境或者在有基准站的地方进行定位。 定位后的数据如图: 我要读取的是RMC的信息 $GNRMC,044125.