自抗扰专题
自抗扰控制理论(四)ADRC控制串级系统
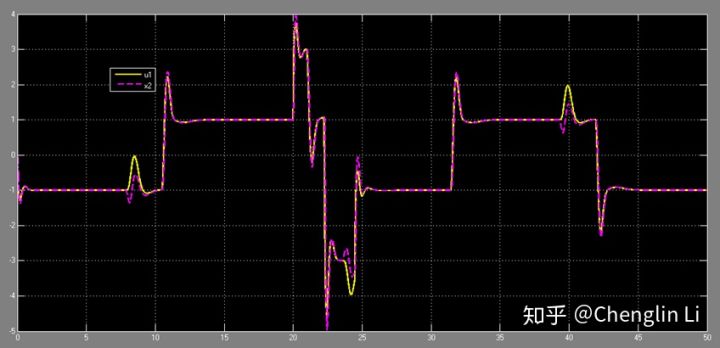
刚刚优酷里面看到一个用串级ADRC弄无人机的视频 https://v.youku.com/v_show/id_XNDA5MTY5ODQxNg==.html 摘自:https://zhuanlan.zhihu.com/p/115344982 自抗扰控制理论(四)ADRC控制串级系统 Chenglin Li 厦门大学 飞行器设计硕士在读 1 概念 用控制量u驱动其中
MATLAB 自抗扰控制 - Active Disturbance Rejection Control
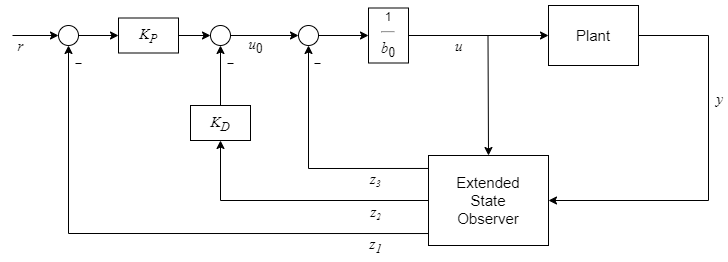
系列文章目录 MATLAB 模型参考自适应控制 - Model Reference Adaptive Control 文章目录 系列文章目录前言一、控制器结构1.1 一阶逼近1.2 二阶逼近 二、指定控制器参数参考 前言 自抗扰控制 (ADRC) 是一种无模型控制方法,适用于为具有未知动态特性以及内部和外部扰动的被控对象设计控制器。此算法只需要对被控对象动态特性进行逼
ADRC自抗扰控制原理
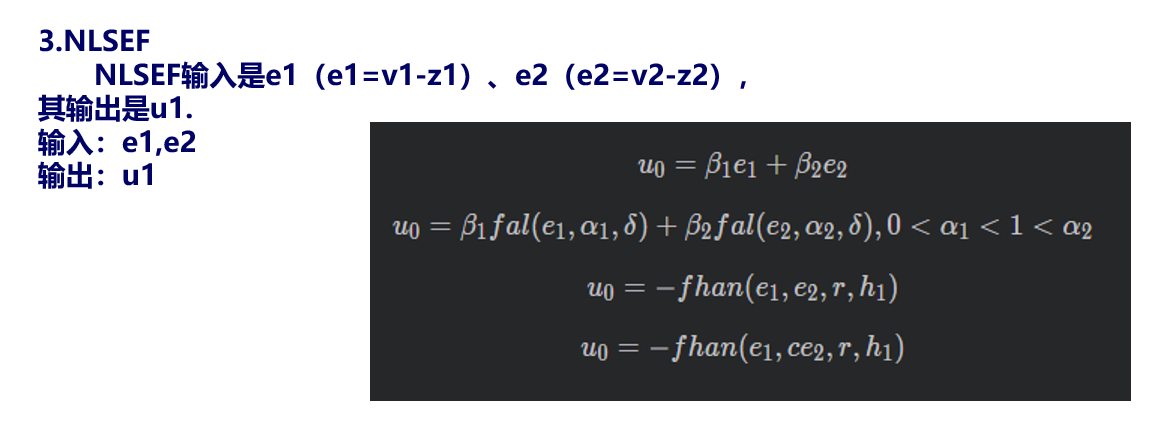
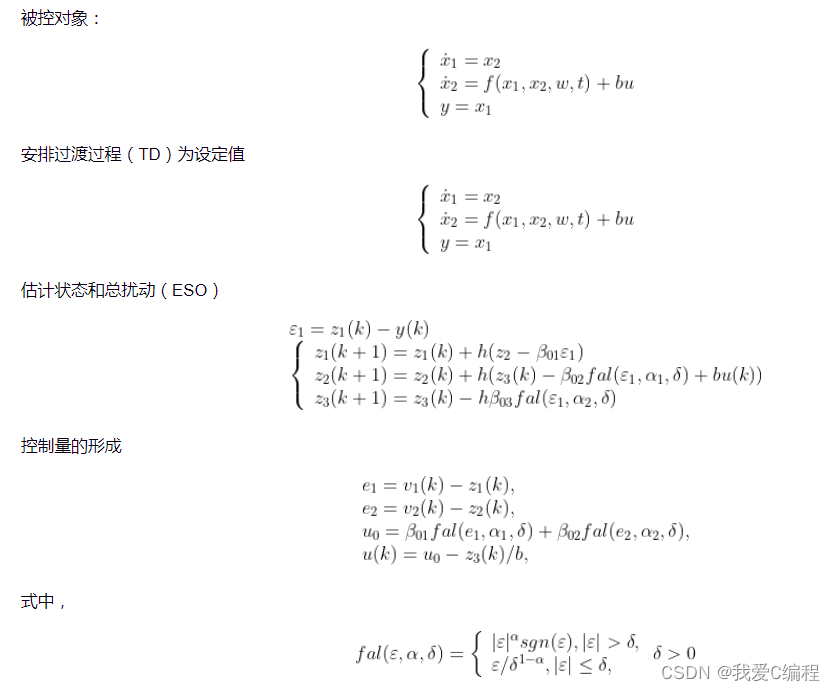
这里写目录标题 TD跟踪微分器ESONLSEF后续把公式的核心原理分析一下 参考链接:ADRC自抗扰控制,有手就行 ADRC是升级版的PID,由TD(跟踪微分器),ESO(扩张状态观测器),NLSEF(非线性控制律)。 其中TD主要是为了防止目标值突变而安排的过渡过程,ADRC的灵魂在于ESO,NLSEF则是改良PID直接线性加权(输出=比例+积分+微分)而引进的非线性
【自抗扰控制ADRC】扩张观测器ESO
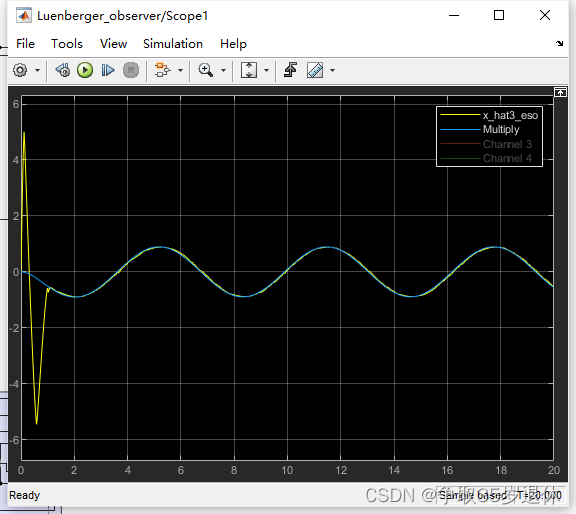
传送门 前言线性状态观测器龙伯格观测器 非线性状态观测器扩张状态观测器(ESO) 前言 扩张观测器ESO也属于状态观测器中的一种,因此在对ESO展开推导描述前,会以循序渐进的方式引出线性观测器等内容,最后再衍生出对ESO的描述和推导。 线性状态观测器 对于一个线性状态方程而已,它的输出不一定能够完全呈现所有状态变量,这就涉及到关于系统状态方程的可观测性。对于以下的状态方程
基于ADRC自抗扰控制器的simulink仿真,ESO和TD等模块使用S函数开发
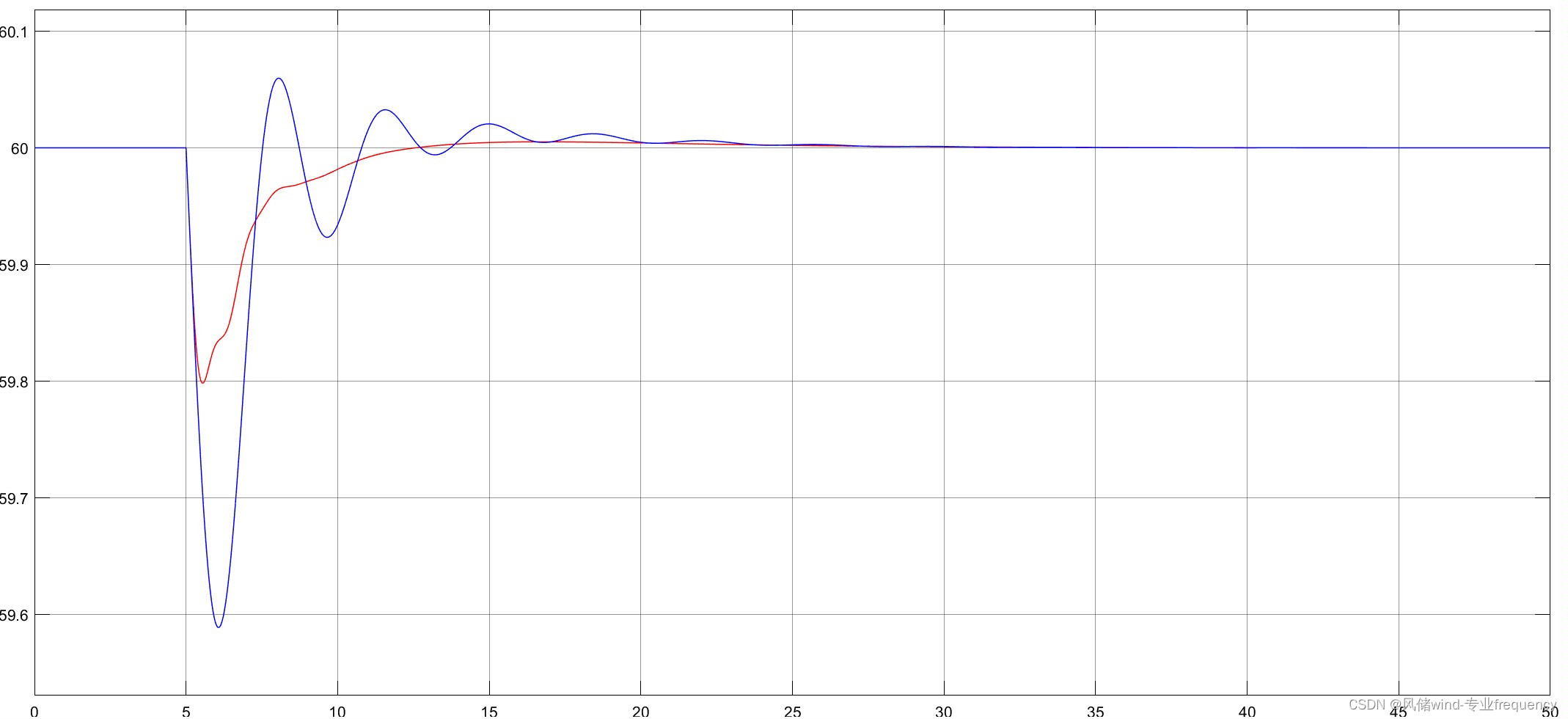
目录 1.算法仿真效果 2.MATLAB核心程序 3.算法涉及理论知识概要 4.完整MATLAB 1.算法仿真效果 matlab2022a仿真结果如下: 2.MATLAB核心程序 ..................................................function [sys,x0,str,ts] = mdlInitialize
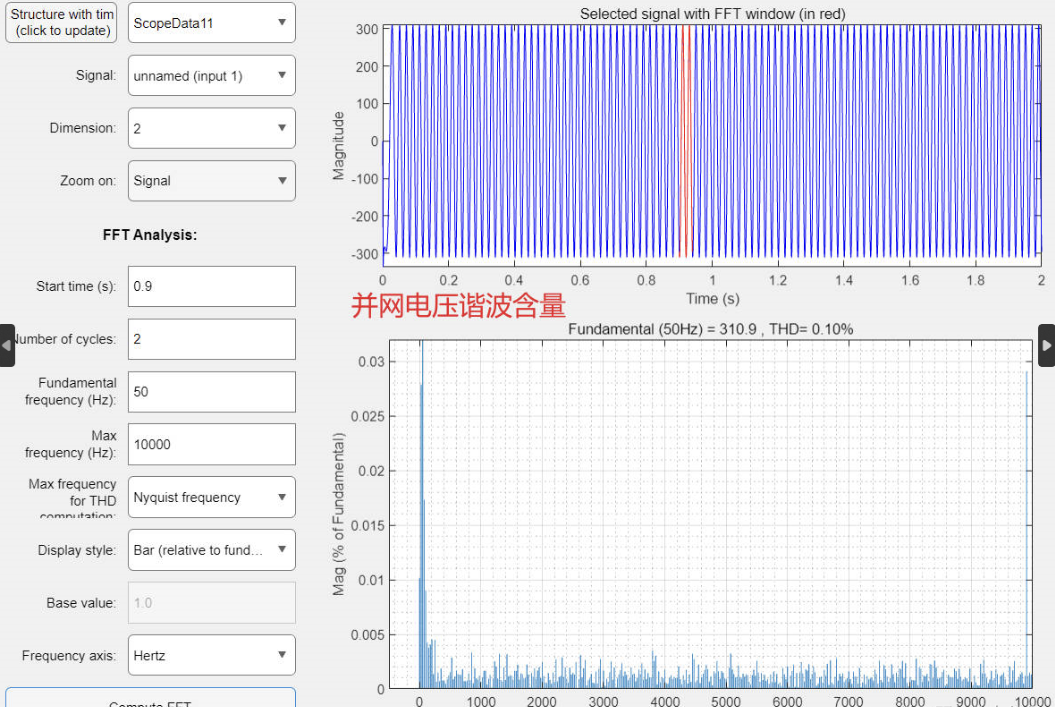
基于LADRC自抗扰控制的VSG三相逆变器预同步并网控制策略(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 整体控制框图 2.2 主体仿真模型 2.3 主体控制模块 2.4 有功无功比较图 2.5 使用普通VSG控制的并网电压波形图 2.6 使