线控专题

车载测试| 汽车的五域架构 (含线控技术知识)
汽车的五域架构是一种将汽车电子控制系统按照功能进行划分的架构模式,主要包括动力域、底盘域、座舱域、自动驾驶域和车身域。(汽车三域架构通常是指将汽车电子系统划分为三个主要领域:动力域、底盘域和智能座舱域(或车身舒适域)) 以下是对这五个域的详细介绍: 1、**动力域**: **功能**:动力域控制器是智能化的动力总成管理单元,主要功能包括对多种动力系统单元(如内燃机、电动机/发电机、电池、变

基于carsim的线控转向仿真(2)--齿条力观测
观测器更详细的介绍文章可以关注博主以下两篇文章 从小车倒立摆系统看系统建模控制LQR+LQE仿真_lqr平衡小车仿真模型-CSDN博客 好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_观测器极点配置-CSDN博客 三个实例迅速掌握经典卡尔曼滤波用法_卡尔曼滤波 温度估计-CSDN博客 本篇文章中,博主使用matlab提供的kalman函数,进行观测器设计。 一、系统

基于carsim的线控转向仿真(1)--carsim车辆模型目标角度跟踪
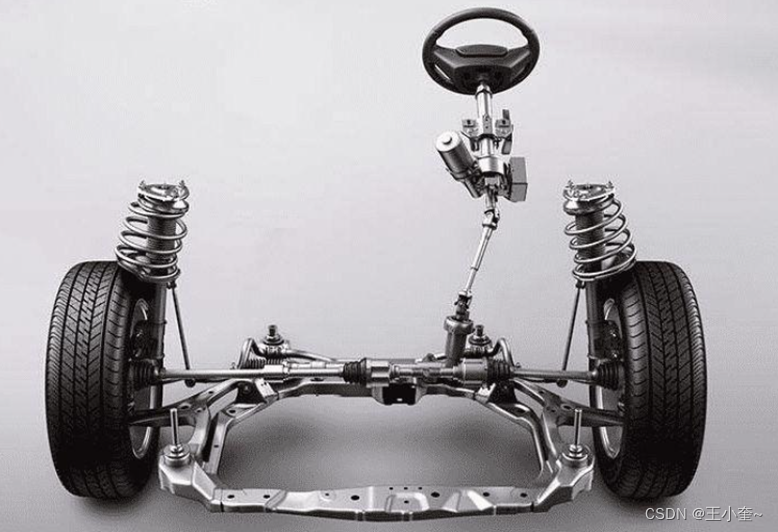
一、Rwa转向执行总成建模 Rwa包括齿轮齿条机构、转向组件以及转向执行电机;如下图,电机输出轴通过齿轮减速增扭后,再经过一个半径为rp的小齿轮,直接带动齿条左右移动。齿条的移动通过转向摇臂,带动车轮转动,整套系统从电机的转动,转换为齿条的左右移动,再转换成车轮的左右摆动。 1、转向电机建模 在线控转向中,转向电机是一个执行器,上层给多少需求力矩,电机控制器便响应多少力矩。这里,我们用
【自动驾驶】针对低速无人车的线控底盘技术
目录 术语定义 一般要求 操纵装置 防护等级 识别代号 技术要求 通过性要求 直线行驶稳定性 环境适应性要求 功能安全要求 信息安全要求 故障处理要求 通信接口 在线升级(OTA) 线控驱

干货满满!汽车线控底盘技术的前景、学习路径及资料!
线控底盘的概念随着新能源汽车的发展呼之欲出,其前景究竟几何?如何入门及成为线控底盘领域的专业人士… 关注我,共同交流,一起成长 前言一、汽车线控底盘研发岗的前景二、汽车线控底盘技术学习路径1.了解线控底盘技术2.入门线控底盘技术 前言 最近有粉丝问我汽车线控底盘方面的前景几何的问题,然后还有问怎么去开展线控底盘技术方面的学习,有没有啥资料,在这里统一和大家分享一下。
汽车线控转向系统介绍
汽车线控转向系统由方向盘总成、转向执行总成和主控制器(ECU)三个主要部分以及自动防故障系统、电源等辅助系统组成。 线控转向系统(Steering-By-Wire),取消了方向盘和转向车轮之间的机械连接部件,彻底摆脱了机械固件的限制,完全由电能来实现转向。在线控转向系统中,驾驶员的操纵动作通过传感器变成电信号,信号经分析处理后,通过导线直接传递到执行机构。由于不受机械结构的限制,可以实现理论

热钱涌向线控底盘!XYZ全栈集成引领新风向
在车身、底盘部分,中央计算+区域控制带动传统车控、底盘及动力控制ECU市场迎来新一轮技术升级和域融合窗口期。线控制动、转向及空气悬架,正在加速与智能驾驶融合并进一步提升驾乘体验。 12月13-15日,2023(第七届)高工智能汽车年会暨高工金球奖评选颁奖典礼在上海隆重举行。在15号上午由【同驭汽车科技冠名】的专场六中,高工智能汽车研究院重磅发布了数据报告《中国智能汽车市场智能底盘数据报告(首发)

全速冲刺!智能线控底盘「总动员」
作为智能化体验升级的关键一环,线控底盘赛道(从制动、悬架到转向)正在进入全面上车周期。同时,配合底盘域及中央控制架构,实现智驾与底盘的全面融合。 本周,丰田(以及旗下雷克萨斯品牌)宣布,即将于明年上市的纯电动SUV新车将成为这家全球汽车巨头首批在欧洲采用“线控转向”技术的车型。 ,时长00:09 同时,特斯拉的纯电动皮卡Cybertruck也将首次采用线控转向技术,并于上周开始交

viple与物理机器人(一):线控模拟
为了检测viple程序与物理机器人是否能顺利连接上 如果能顺利连接上,那么,可以通过内建事件从而控制物理机器人的前进、后退、左转、右转以及暂停。 如果不能连接上,首先,程序无法控制物理机器人,其次,当viple程序中编写沿右墙迷宫算法(或者其他算法),由于viple程序和物理机器人不能连接上,无论算法多么高级,都使用不上,当然,也就看不到任何运行效果了。 所以,首先测试viple与物理机
viple与物理机器人(一):线控模拟
为了检测viple程序与物理机器人是否能顺利连接上 如果能顺利连接上,那么,可以通过内建事件从而控制物理机器人的前进、后退、左转、右转以及暂停。 如果不能连接上,首先,程序无法控制物理机器人,其次,当viple程序中编写沿右墙迷宫算法(或者其他算法),由于viple程序和物理机器人不能连接上,无论算法多么高级,都使用不上,当然,也就看不到任何运行效果了。 所以,首先测试viple与物理机
viple与物理机器人(一):线控模拟
为了检测viple程序与物理机器人是否能顺利连接上 如果能顺利连接上,那么,可以通过内建事件从而控制物理机器人的前进、后退、左转、右转以及暂停。 如果不能连接上,首先,程序无法控制物理机器人,其次,当viple程序中编写沿右墙迷宫算法(或者其他算法),由于viple程序和物理机器人不能连接上,无论算法多么高级,都使用不上,当然,也就看不到任何运行效果了。 所以,首先测试viple与物理机