本文主要是介绍汽车线控转向系统介绍,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
汽车线控转向系统由方向盘总成、转向执行总成和主控制器(ECU)三个主要部分以及自动防故障系统、电源等辅助系统组成。

线控转向系统(Steering-By-Wire),取消了方向盘和转向车轮之间的机械连接部件,彻底摆脱了机械固件的限制,完全由电能来实现转向。在线控转向系统中,驾驶员的操纵动作通过传感器变成电信号,信号经分析处理后,通过导线直接传递到执行机构。由于不受机械结构的限制,可以实现理论上的任意转向意图,因此线控转向系统被称为目前最先进的转向系统。
线控转向系统结构
主要由方向盘模块、主控制器、执行模块、故障处理系统,电源等部分组成。
其中方向盘模块、主控制器、执行模块是线控转向的3个主要部分,其他模块属于辅助部分。
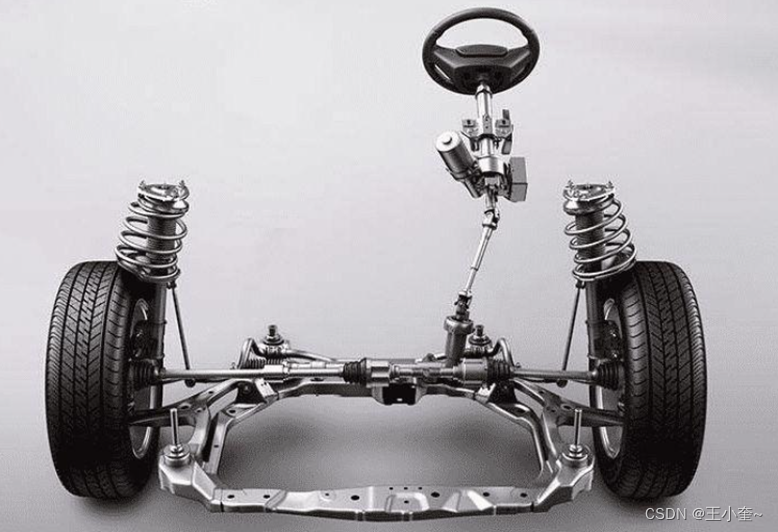
方向盘总成包括方向盘、方向盘转角传感器、力矩传感器、方向盘回正力矩电机。
方向盘总成的主要功能是将驾驶员的转向意图转换成数字信号,并传递给主控制器;同时接受主控制器送来的力矩信号,产生方向盘回正力矩,以提供给驾驶员相应的路感信息。方向盘模块通过测量方向盘的转角和转矩,将驾驶员的转向意图,转换成数字信号,并传递给主控制器;同时,方向盘模块接收主控制器反馈的力矩信号,产生方向盘的回正力矩,为驾驶员提供对应的路感。转向执行总成包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等组成。转向执行总成的功能是接受主控制器的命令,通过转向电机控制器控制转向车轮转动,实现驾驶员的转向意图。
主控制器即ECU,是线控转向的核心,相当于大脑,它决定了线控转向的控制效果。它的主要作用是分析和处理各路信号,判断转向意图和汽车的运动状态,并输出相应的控制指令。
主控制器一方面对采集到的信号进行分析处理,向转向执行电机和回正力矩电机发送指令,确保两台电机协同工作,从而实现车辆的转向运动和路感的模拟。另一方面,主控制器保持对驾驶员的操作和车辆的状态进行实时监控,实现智能化的控制。
主控制器对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力电机和转向电机发送指令,控制两个电机的工作,保证各种工况下都具有理想的车辆响应,以减少驾驶员对汽车转向特性随车速变化的补偿任务,减轻驾驶员负担。同时控制器还可以对驾驶员的操作指令进行识别,判定在当前状态下驾驶员的转向操作是否合理。当汽车处于非稳定状态或驾驶员发出错误指令时,线控转向系统会将驾驶员错误的转向操作屏蔽,而自动进行稳定控制,使汽车尽快地恢复到稳定状态。
转向执行模块的作用是实现和执行驾驶员的转向意图,它由转向执行电机、转向电机控制器、车轮转向组件以及车轮转角传感器组成。执行模块接受主控制器的指令,通过转向电机及其控制器,控制转向轮的转动,实现转向。
自动防故障系统是线控转向系的重要模块,它包括一系列的监控和实施算法,针对不同的故障形式和故障等级做出相应的处理,以求最大限度地保持汽车的正常行驶。作为应用最广泛的交通工具之一,汽车的安全性是必须首先考虑的因素,是一切研究的基础,因而故障的自动检测和自动处理是线控转向系统最重要的组成系统之一。它采用严密的故障检测和处理逻辑,以更大地提高汽车安全性能。
汽车线控转向系统的工作原理
用传感器检测驾驶员的转向数据,然后通过数据总线将信号传递给车上的ECU,并从转向控制系统获得反馈命令;转向控制系统也从转向操纵机构获得驾驶员的转向指令,并从转向系统获得车轮情况,从而指挥整个转向系统的运动。转向系统控制车轮转到需要的角度,并将车轮的转角和转动转矩反馈到系统的其余部分,比如转向操纵机构,以使驾驶员获得路感,这种路感的大小可以根据不同的情况由转向控制系统控制。
这篇关于汽车线控转向系统介绍的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








