离散系统专题
【Simulink系列】——动态系统仿真 之 离散系统线性离散系统
一、离散系统定义 离散系统是指系统的输入与输出仅在离散的时间上取值,而且离散的时间具有相同的时间间隔。满足下列条件: ①系统(的输入输出)每隔固定时间间隔才更新一次。固定时间间隔称为采样时间。 ②系统的输出依赖当前的输入、以往的输入和输出。见数学描述 ③系统具有离散的状态。状态是指系统前一时刻的输出量。 设系统的输入变量为其中n为采样时刻,Ts为系统的采样时间。由于Ts为固定值,因而系统
数字信号处理笔记05:离散系统变换域分析
一、LTI系统的表征 1. LTI系统卷积 2. DTFT卷积定理 3. Z变换的卷积定理 二、LTI系统的频域表示 1. LTI系统的特征函数 对于单位脉冲响应为的LTI系统,当输入复指数序列为时,可求出输出序列为 2. LTI系统的频率响应 当频率为的单频复指数序列输入LTI系统时,LTI系统不改变输入序列的频率,只会对输入序列的幅度和相位产生影响,因此描述了L

自动控制原理7.5:离散系统的稳定性与稳态误差
参考书籍:《自动控制原理》(第七版).胡寿松主编. 《自动控制原理PDF版下载》 5.离散系统的稳定性与稳态误差 5.1 s s s域到 z z z域的映射 在 z z z变换定义中, z = e s T z={\rm e}^{sT} z=esT给出了 s s s域到 z z z域的关系, s s s域中的任意点可表示为 s = σ + j ω s=\sigma+{\rm j}\o

连续与离散系统的傅里叶级数、傅里叶变换以及Z变换的关系分析(FS、FT、DFS、DTFT、DFT、ZT)
纯手写,纯自我理解与总结,欢迎大家提意见 适用于已有信号与系统、数字信号处理相关知识,但对这几类变换的关系理解不清的童鞋使用 不适用于一点没基础的,因为下图中没有详细的公式推导,请自行充电

开源飞控ACFLY:ADRC离散系统最速控制综合函数的理解
摘自:https://blog.csdn.net/weixin_40767422/article/details/86709848 ACFLY原创文章,转载请说明出处https://blog.csdn.net/weixin_40767422/article/details/86709848 ADRC相关论文资料请加q群:180319060下载 最近在看韩京清教授的自抗扰论文,里面关于最速
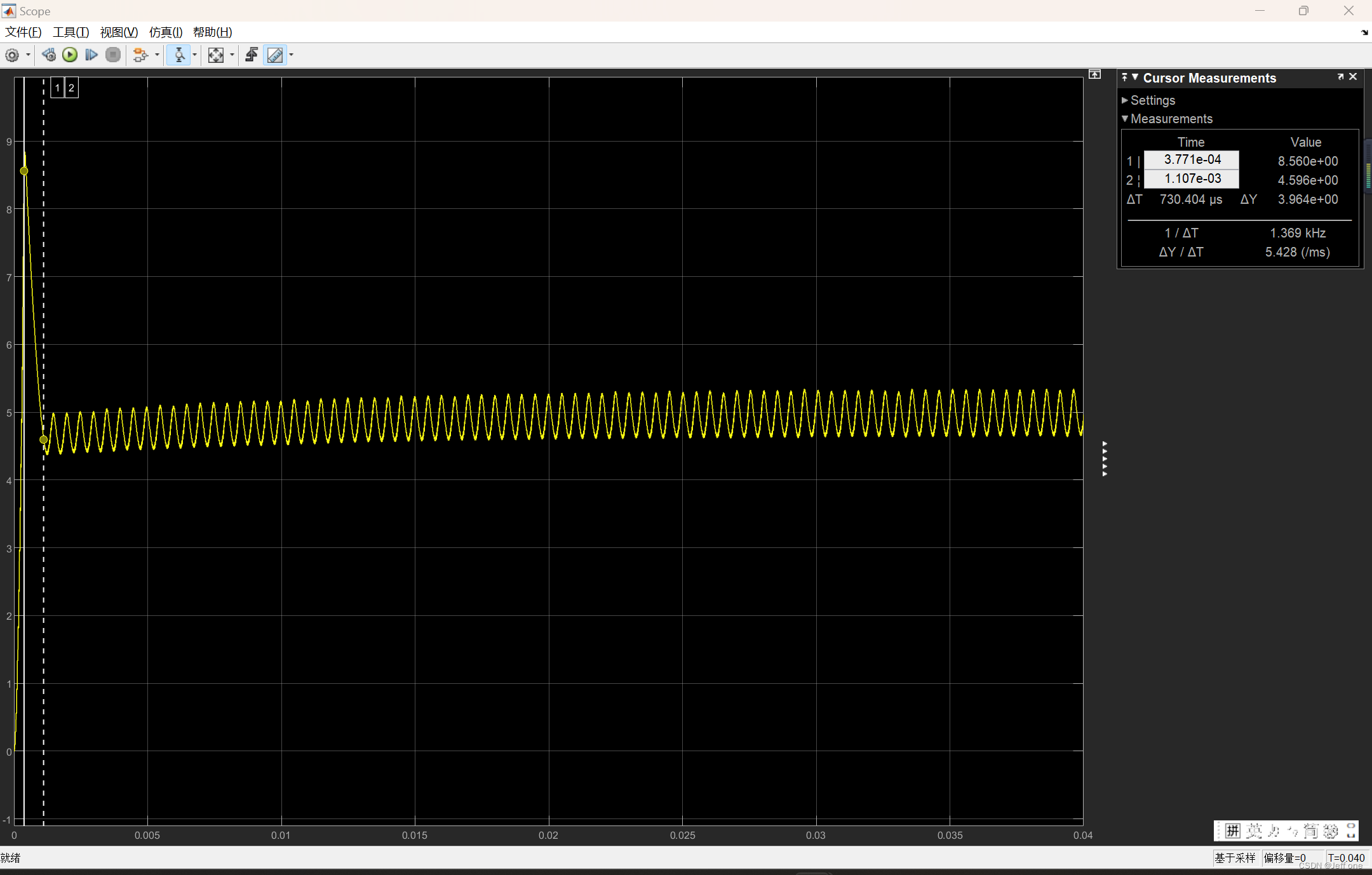
单端反激(离散系统仿真)
单端反激(离散系统仿真) 指令电压为0,电机微速旋转,补足指令电压。 把仿真变成离散的。 最大步长设置方法:如果是对于相控形式的电路,我觉得设置1e-4秒大概就够了,如果是对于斩波形式的电路,设置1e-6或者更小的秒数就够了。 控制是与开关频率是有关系的。 这个是控制的周期。 这个是系统的最小仿真步长。