正逆解专题
多轴机械臂/正逆解/轨迹规划/机器人运动学/Matlab/DH法 学习记录03——机械臂运动学逆解
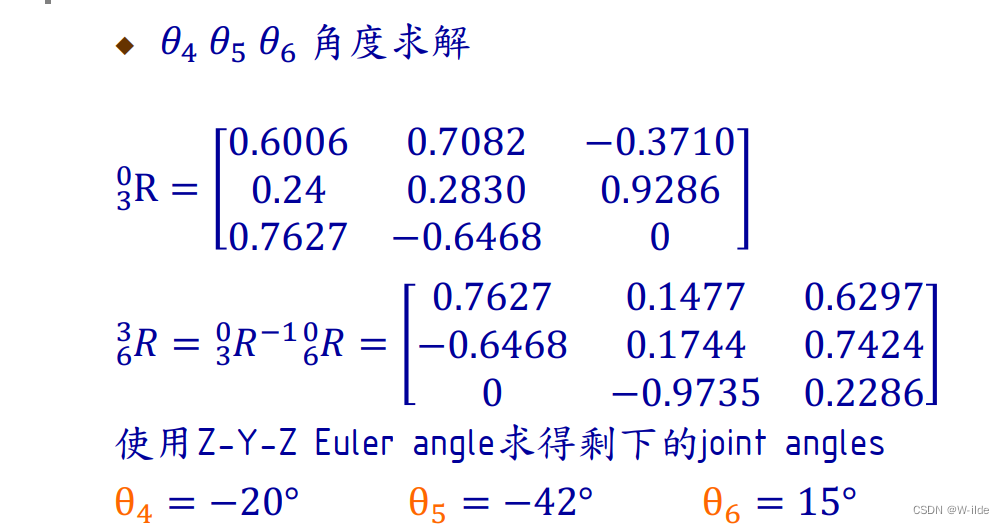
系列文章目录 本科毕设正在做多轴机械臂相关的内容,这里是一个学习机械臂运动学课程的相关记录。 如有任何问题,可发邮件至layraliu@foxmail.com问询。 1. 数学基础 2. 机械臂几何法与DH表示法 3. 机械臂运动学逆解 文章目录 系列文章目录一、引言1.手臂顺向运动学forward kinematics(FK)2.手臂逆向运动学inverse kinematics(IK
多轴机械臂/正逆解/轨迹规划/机器人运动学/Matlab/DH法 学习记录01——数学基础
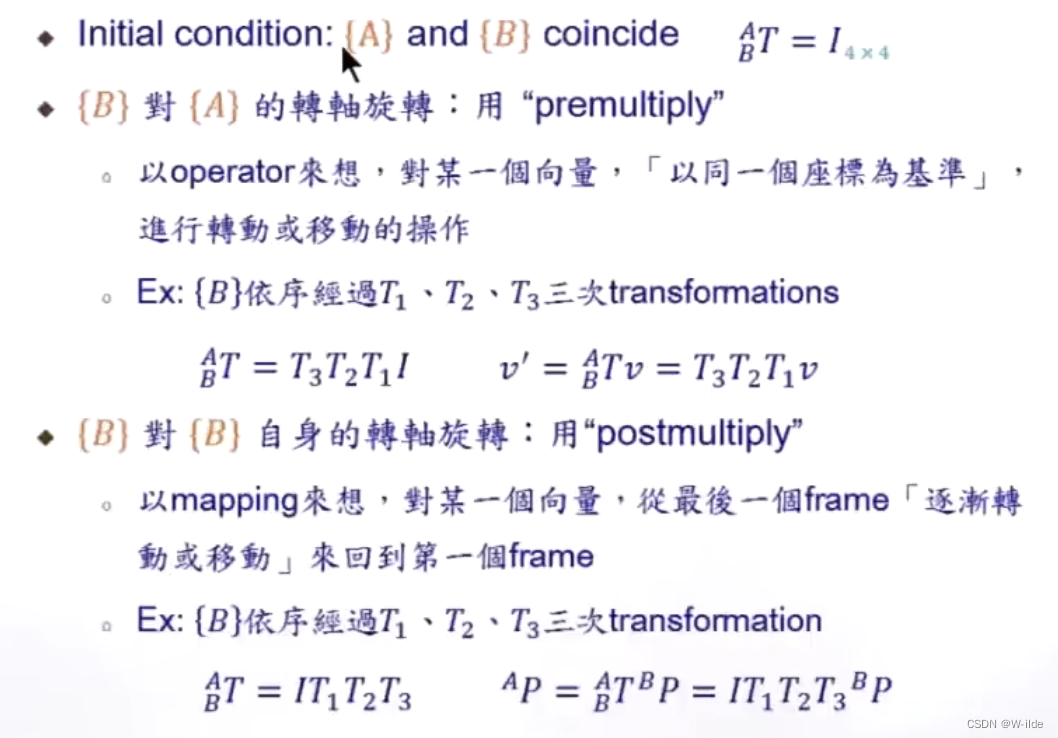
系列文章目录 本科毕设正在做多轴机械臂相关的内容,这里是一个学习机械臂运动学课程的相关记录。 如有任何问题,可发邮件至layraliu@foxmail.com问询。 1. 数学基础 文章目录 系列文章目录一、空间位置、姿态描述二、旋转矩阵(Rotation matrix)1.特性2.用法3.旋转矩阵与转角(旋转的前后顺序不能互换) 三、变换矩阵1.如何将移动和转动整合在一起2.trans
html ur是什么意思_UR机械臂simscape正逆解仿真
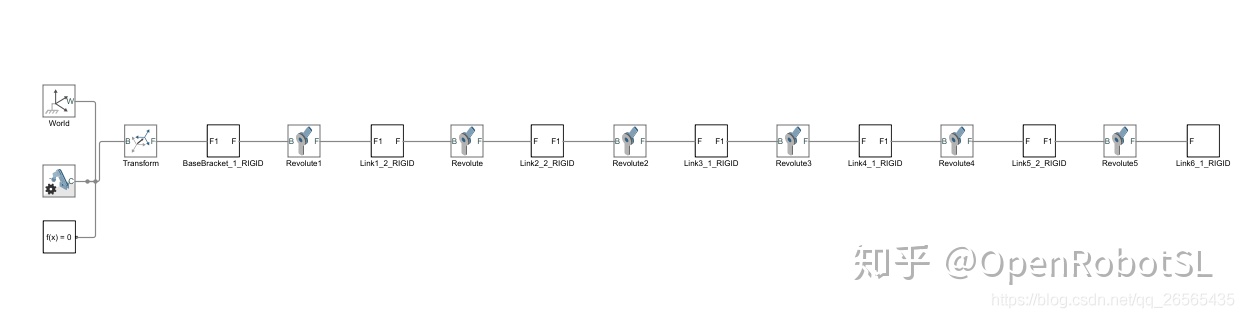
最近在看相关的课程,把作业做一下,还是蛮有意思的。(课程代码所以涉及版权问题,经过同意后我上传代码) UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,不同机械臂的urdf文件可以自己在SolidWorks中建模