最优控制专题

【深入解析】最优控制中的Bellman方程——从决策到最优路径的探索
【深入解析】最优控制中的Bellman方程——从决策到最优路径的探索 关键词提炼 #Bellman方程 #最优控制 #动态规划 #值函数 #策略优化 #强化学习 第一节:Bellman方程的通俗解释与核心概念 1.1 通俗解释 Bellman方程是动态规划中的一个核心概念,它像是一个“未来价值指南针”,帮助我们在面对一系列决策时,找到从当前状态出发到达目标状态的最优路径。想象一下,你站

轨迹规划 | 图解最优控制LQR算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 最优控制理论2 线性二次型问题3 LQR的价值迭代推导4 基于差速模型的LQR控制5 仿真实现5.1 ROS C++实现5.2 Python实现5.3 Matlab实现 0 专栏介绍 🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(
最优控制理论笔记 - 01数学准备
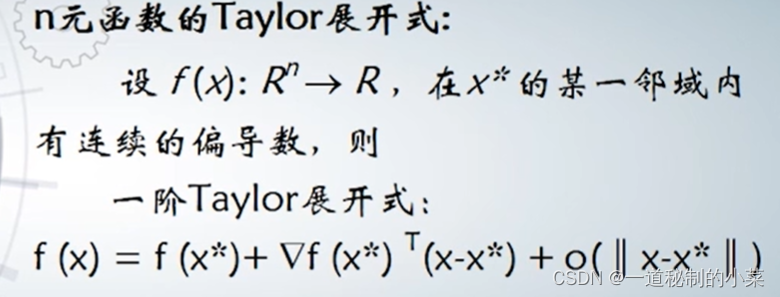
目录 一、向量和矩阵的微分 1. 向量对标量的导数 2. 矩阵对标量的导数 2.1 矩阵对标量的导数的运算公式 2.2 标量函数对向量的导数: 2.3 向量函数对向量的导数 二、函数极值的问题 三、有约束条件的函数极值问题 四、n元函数的Taylor 一、向量和矩阵的微分 1. 向量对标量的导数 n维向量函数:f(t) = [f1(t), f2(t), ...,
Introduction CMU最优控制16-745超详细学习笔记
CMU最优控制16-745超详细学习笔记 背景 跌跌撞撞入坑Optimization-based Motion Planning和Optimal Control已经大半年啦,这大半年来迷迷糊糊看了不少相关资料和论文,想借这个机会来整理一下相关的内容,也算是给自己写论文理清一下思路。 去年年底做一个移动机械臂移动操作mobile manipulation课题看了ETH RSL开源框架OCS2(
CasADi - 最优控制开源 Python/MATLAB 库
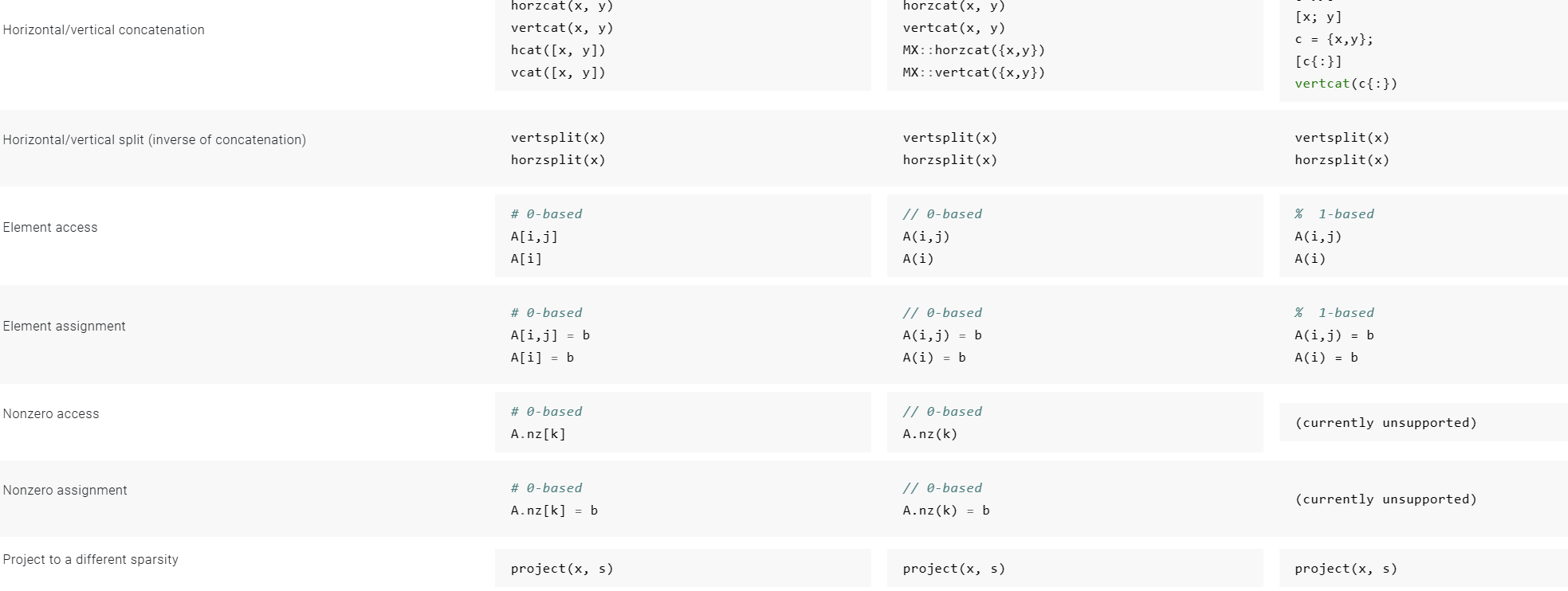
系列文章目录 文章目录 系列文章目录前言一、介绍1.1 CasADi 是什么?1.2 帮助与支持1.3 引用 CasADi1.4 阅读本文档 二、获取与安装三、符号框架3.1 符号 SX3.1.1 关于命名空间的说明3.1.2 C++ 用户注意事项 3.2 DM3.3 符号 MX3.4 SX 和 MX 混合使用3.5 稀疏类3.5.1 获取并设置矩阵中的元素 3.6 运算操作3.7 属
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-4 轨迹追踪](https://img-blog.csdnimg.cn/direct/40f20d6d28c74c3a981944c5315bfd56.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-4 轨迹追踪
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-4 轨迹追踪 1. 目标误差控制-误差的调节2. 稳态非零值控制3. 输入增量控制 1. 目标误差控制-误差的调节 2. 稳态非零值控制 3. 输入增量控制
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming](https://img-blog.csdnimg.cn/direct/718639af45714c9496ccc3df795adbff.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming 1. 基本概念2. 代码详解3. 简单一维案例 1. 基本概念 Richoard Bell man 最优化理论: An optimal policy has the property th
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标](https://img-blog.csdnimg.cn/direct/795a53af3e9143c7b8b4dc4861f83c39.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-1最优控制问题与性能指标
Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录 前言 我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定义接触序列(predefined sequence of co
Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录 前言 我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定义接触序列(predefined sequence of co
机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SN

非线性最优控制理论及MATLAB实现,【JL091】最优控制理论研究及其MATLAB实现.rar
【JL091】最优控制理论研究及其MATLAB实现.rar 英 文 翻 译 系 别 自动化系 专 业 自动化 班 级 191002 学生姓名 粘风姣 学 号 103623 指导教师 韩治国 、李雪霞 Optimal Spacecraft Rendezvous Using Genetic Algorithms Young Ha Kim and David B. Spencer Pennsylva
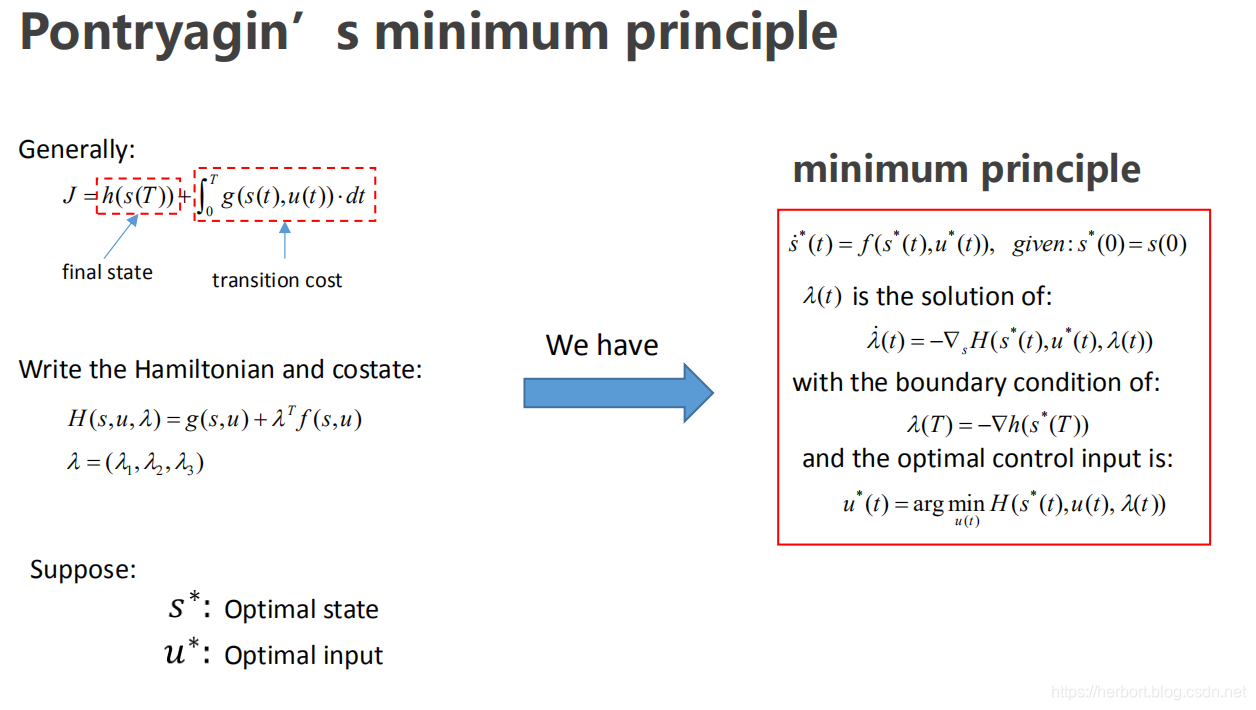
用庞特里亚金极小值原理求解二阶系统的最优控制问题
庞特里亚金极小值原理 庞特里亚金极小值原理是在控制向量u(t)受限制的情况下,使得目标函数J取极小,从而求解最优控制问题的原理和方法,又称极大值原理。λ是协态向量,系统模型有多少个变量就有多少个协态。s和u都是省略了符号t的,代表某一时刻的最优状态和最优控制,是一个常数。利用庞特里亚金极小值原理求解最优控制问题首先需要求解协态方程,也就是λ,然后再求解最优控制u*,求解完u*之后,即可得到最优状