改正专题
Septentrio接收机二进制的BDS b2b改正数解码
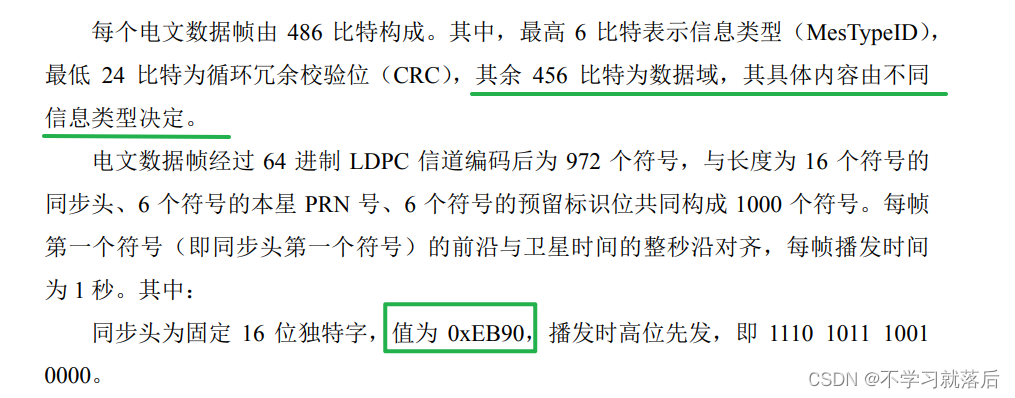
Galileo的HAS和BDS B2b改正数为实时PPP提供了可能,要实现实时PPP解算,必须对对应的数据进行解码。由于没有做过解码的工作,现结合qzsl6tool代码对Septentrio的解码代码进行学习。 1. 二进制帧头的识别和解码 定义一个读取数据的类,通过传递文件名进行数据读取,并通过帧头去提取独立数据帧: 2. 二进制帧体的识别和解码 上述代码读取数据后,将98

记录Pyqt5通过样式表给主窗口设置背景图片的踩坑细节以及改正方法
背景 在编写交互式界面的时候,基本功能实现之后想要给窗口换一个好看的背景。那么问题就来了,我不想通过qt设计师来换背景(其实就是菜),一是因为在设计师的资源文件里加载的背景在实际运行时会影响其他控件比如按钮的样式,二是想着直接在继承类的代码中设置样式表封闭性很好,后续如果想用设计师改UI不会对窗口造成什么影响。 问题 最初的时候我尝试直接如下所示设置样式表: self.setStyleSh
13 - grace数据处理 - 泄露误差改正 -正演建模法(Forward-Modeling)
grace数据处理 - 泄露误差改正 -正演建模法(Forward-Modeling) *0* 引言*1* Matlab代码实现 0 引言 正演建模法最早是由Chen等提出的,本质是通过迭代的思想反求真实信号的过程,为什么要反求呢?因为在数据处理过程中做了球谐截断和空间滤波,使部分有用信号被湮灭,也就是有信号泄露了,那迭代解即为恢复的结果。其具体流程如下:

C++ //练习 5.18 说明下列循环的含义并改正其中的错误。
C++ Primer(第5版) 练习 5.18 练习 5.18 说明下列循环的含义并改正其中的错误。 (a) doint v1, v2;cout<<"Please enter two numbers to sum: ";if(cin>>v1>>v2)cout<<"Sum is: "<<v1 + v2<<endl;while(cin);(b) do {// ...} while(int iva
C++ //练习 5.15 说明下列循环的含义并改正其中的错误。
C++ Primer(第5版) 练习 5.15 练习 5.15 说明下列循环的含义并改正其中的错误。 (a) for(int ix = 0; ix != sz; ++ix) { /* ... */ }if(ix != sz)// ...(b) int ix;for(ix != sz; ++ix) { /* ... */ }(c) for(int ix = 0; ix != sz; ++ix
_tcsstr ambiguous错误的改正
_tcsstr(m_sFile, _T("avi") 改为 // finding avi if( _tcsstr((char*) m_sFile, _T("avi"))==NULL ) { m_sFile+=_T(".avi"); }

GAMP源码阅读:PPP中的模型改正:对流层延迟、电离层延迟
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、对流层延迟改正1、原理2、model_trop():对流层改正入口函数3、tropmodel():Saastamoinen 模型改正计算延迟1. Saastamoinen 模型2. 标准大气模型3.
python练习2【题解///考点列出///错题改正】
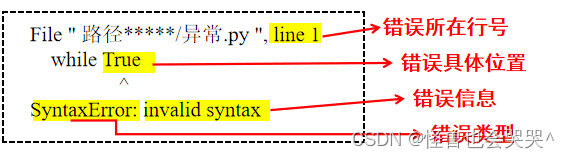
一、单选题 【文件】 *1.【单选题】 ——文件:读取方法 下列哪个选项可以从文件中读取任意字节的内容?(C )A A.read() B.readline() C.readlines() D.以上全部 A\B\C三种方法都是可以读取文件中任意的字节内容的,选择C是当时受关键字眼“指定”影响,理解错了 文件的读取作用read()读取从指定文件中读取指定字节的文件内容,若无设
读取官方发布的DCB文件进行硬件延迟改正实现STEC提取
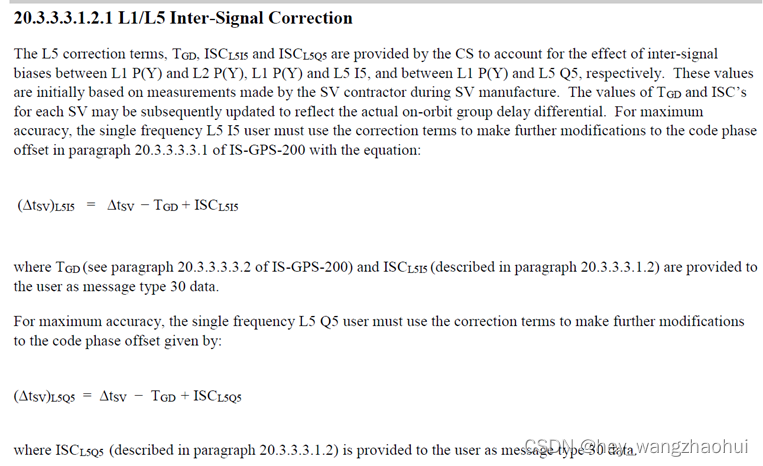
一、引言 如果看到这里,我就将大家当成理解甚至已经实现STEC提取步骤,目前处于需要进行硬件延迟改正的阶段。但是如果大家还理不太清楚,可看参考我之前写过的STEC提取步骤,里面较为详细地推导了STEC提取方程,该篇博客其实专业性较强,需要大家之前阅读过一些相关文献或者是书籍,如果看不太懂话我写的或者想深入了解这部分理论的话,哈哈,不要紧!我个人建议大家去读武汉大学、中科院相关的博
gvim(windows版 第二次改正)
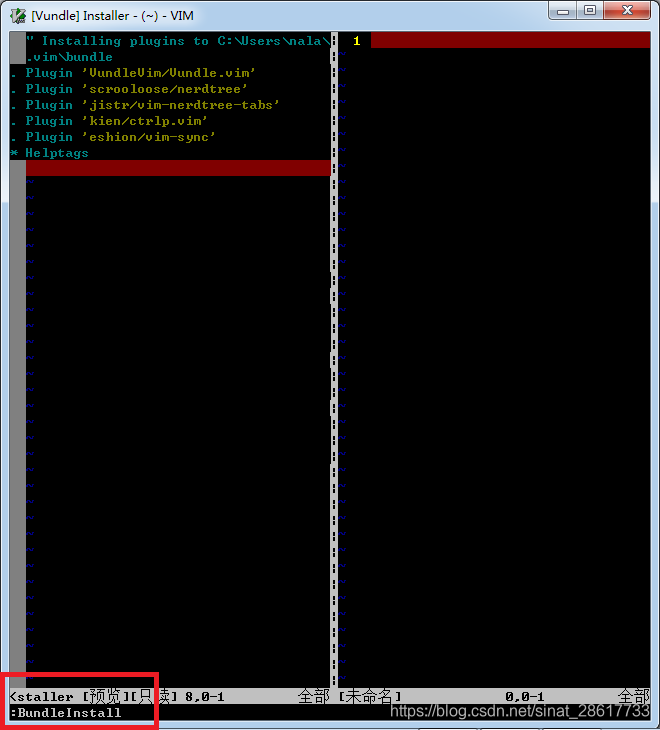
本项中使用的所有插件:gvim,git,curl,vundle,NERDTree ,vim-nerdtree-tabs,CtrlP,neocomplcache,ctags,taglist,winmanager gvim下载: 官方下载地址:http://www.vim.org/download.php 百度网盘: 链接:https://pan.baidu.com/s/1MR_exH0ASy
silent 2020CSP-J初赛试题 改正
最近快要初赛了,刷了2020的试题,发现今年做的还不如去年成绩高,太过于差劲,特别是组合数部分,全错,所以本文把组合数的题解全部详细的写一遍 第十题 五个小朋友并排站成一列,其中有两个小朋友是双胞胎,如果要求这两个双胞胎必须相邻,则有( )种不同排列方法? 五个小朋友,可以划分成两个部分,一个部分是一对双胞胎,一个部分是三个普通小朋友,双胞胎有两个人,所以排列时,第一个人的选择有两种,我们选出

error LNK2001: unresolved external symbol protected: virtual struct AFX_EVENTSINKMAP …改正方法。
当出现如下错误的时候,解决办法: TabSheet.obj : error LNK2001: unresolved external symbol "protected: virtual struct AFX_EVENTSINKMAP const * __thiscall CTabSheet::GetEventSinkMap(void)const " (?GetEventSinkMap@CTab
GAMP源码阅读:PPP中的模型改正:天线相位中心、天线相位缠绕、潮汐、地球自转效应、引力延迟
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、卫星天线相位中心改正1、原理2、文件读取3、setpcv():设置天线参数4、satantoff():卫星 PCO 改正5、satantpcv():卫星 PCV 改正 二、接收机天线相位中心改正
GAMP源码阅读:PPP中的模型改正:对流层延迟、电离层延迟
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、对流层延迟改正1、原理2、model_trop():对流层改正入口函数3、tropmodel():Saastamoinen 模型改正计算延迟1. Saastamoinen 模型2. 标准大气模型
GAMP源码阅读:PPP中的模型改正:天线相位中心、天线相位缠绕、潮汐、地球自转效应、引力延迟
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、卫星天线相位中心改正1、原理2、文件读取3、setpcv():设置天线参数4、satantoff():卫星 PCO 改正5、satantpcv():卫星 PCV 改正 二、接收机天线相位中心改正
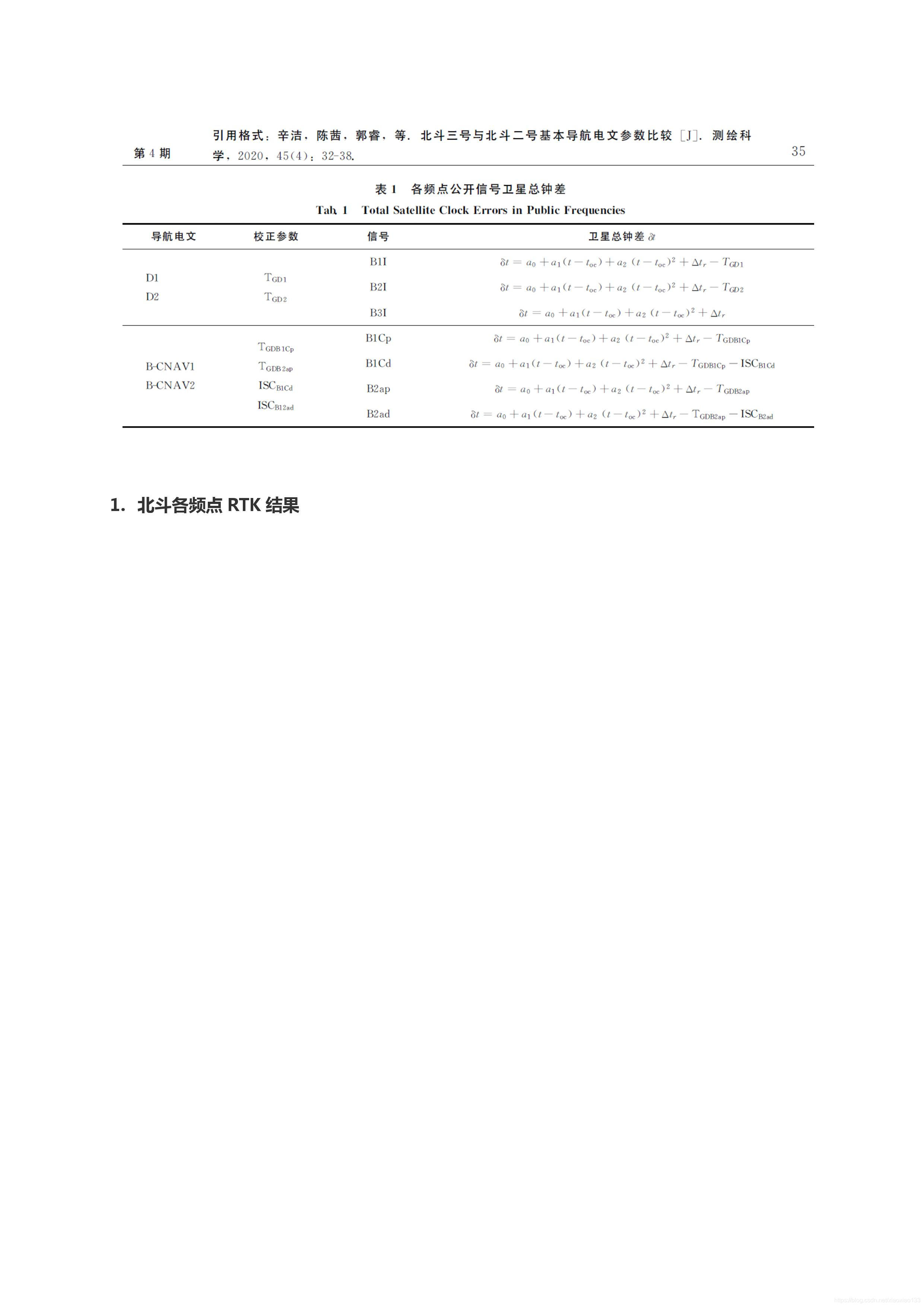
BDS3信号TGD改正,GNSS信号TGD改正,群延迟
参考链接: https://blog.csdn.net/Mr_include/article/details/78205407 https://blog.csdn.net/rstaotao/article/details/100574739 Thence, TGD and DCB must be taken seriously. The BDS‐3 sat‐ ellite clock is re

遗传算法求解垂直泊车过程,代码不能用,那位大神给改正一下。
%% 清除变量 clear,clc %% 参数 hm=2750; %轴距 h=4667; w=1839; %车长h、宽w; hr=(h-hm)/2; %后悬 hf=hr; %前悬 a=400; b=8000; %通车道宽度 c=500; x0=-2000; %% 获得起始点坐标 prompt={‘X(4000-8000):’,‘Y(8000-11000):’}; name=‘输入起始点’; num
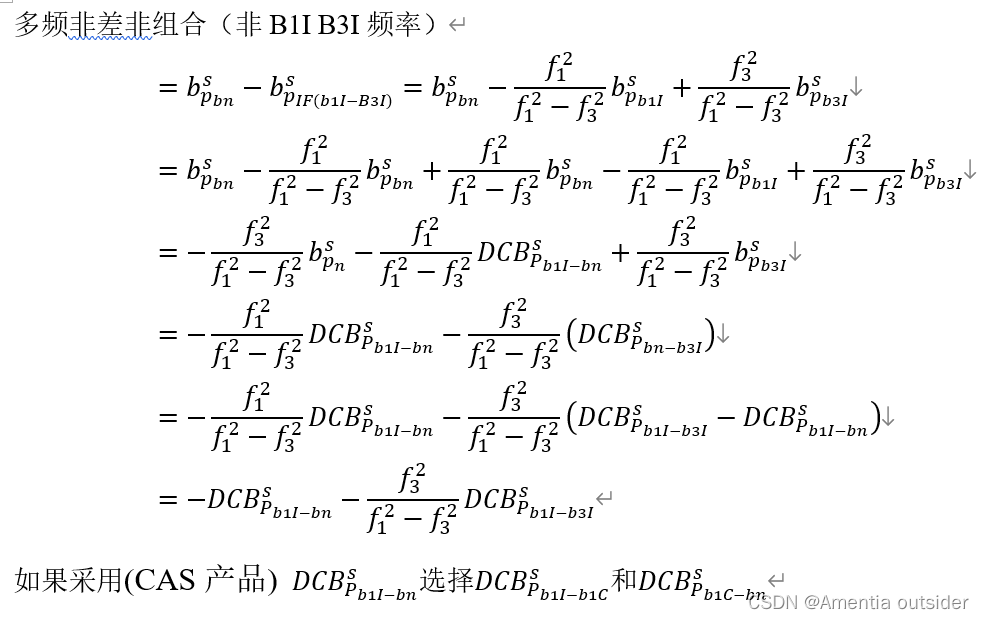
北斗多频多系统卫星端硬件延迟改正(DCB OSB)
卫星端硬件延迟改正通常有两种做法:1、DCB文件改正 2、OSB文件改正(推荐) 下面推导北斗系统DCB改正公式(采用 CAS GFZ产品) 发布的精密星历和精密钟差产品BDS2和BDS3均采用B1I、B3I无电离层组合模型进行参数估计。 在传统的无电离层组合观测数据处理中,该项误差包含在钟差参数中,不需要单独考虑该误差。但是如果用户端不采用同样的无电离层组合,则必须对每个频率上的观测值