接收机专题

【GNSS接收机】开源导航接收机
Pocket SDR Pocket SDR是一款基于软件无线电(SDR)技术的开源GNSS(全球导航卫星系统)接收机。它由名为“Pocket SDR FE”的RF前端设备、设备的一些实用程序以及用Python、C和C++编写的GNSS-SDR AP(应用程序)组成。它支持GPS,GLONASS,Galileo,QZSS,北斗,NavIC和SBAS的几乎所有信号。Pocket SDR FE设备由2

北斗导航 | RAIM接收机自主完好性检测(附代码)
============================================= 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ============================================= 下载更多RAIM论文,加博主建的QQ群: 群名称

北斗导航 | Matlab实现GNSS接收机经纬度数据(NMEA语句)实时获取和地图绘制(Matlab源代码)
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ 这个例子显示了如何从NMEA句子中

北斗导航 | 基于改进RANSAC算法的BDS接收机自主完好性监测算法研究
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ Rearch on BDS RAI

EUT上电时,测试LISN拾取的脉冲电压对接收机的影响
背景:在2024年4月25日发现G220 IP20 FSF1测试结果不一致,有5dB差异,经排查,是两台接收机测试出的结果不一致,经过进一步确认,使用信号发生器直接灌入接收机DI-111内,测试出的结果会少4dB.使用梳状信号发生器作为源对DI-111和DI-144两台仪器进行比较,DI-111这台接收机测试出的结果依然会少大约4dB。 与5月9日返回R&S进行维修。经供应商确认为预选器损坏,造

N9048B PXE EMI 测试接收机,1 Hz 至 44 GHz
_EMI_ N9048B EMI 测试接收机 1 Hz 至 44 GHz Keysight N9048B PXE 是一款符合标准的 EMI 测试接收机,配有射频预选器和 LNA 设计。其实时扫描(RTS)功能有助于您缩短总体测试时间,轻松执行无间隙的信号捕获和分析。 特点 N9048B PXE EMI 测试接收机 加速进行EMI合规性测试 主要特点

1.1 HD-GR接收机
\qquad 本节首先简介GNSS数字接收机的一般架构,然后介绍HD-GR接收机的硬件架构,包括它的接收机底板(HD-GR-1)和它的射频前端模块(HD-2769-2RF-2)。 1.1.1 GNSS数字接收机架构 \qquad 在现代数字化GNSS接收机中,大多数基带功能实现用软件取代了硬件,获得了更强可编程性。然而,数字化硬件具有更高的运算吞吐量,相比于软件,可以提供更高性能。合适地设
GPS接收机的灵敏度分析
GPS接收机的灵敏度分析 作者:深圳市华颖锐兴科技有限公司 <script type="text/javascript"> </script> <script src="http://pagead2.googlesyndication.com/pagead/show_ads.js" type="text/javascript"></script> name="google_ads_frame

短波监测接收机应该怎么选 我们来看看CH905的参数
系统概述 便携式监测接收机针对信号搜索、无线电监测、干扰查证等任务设计,能够完成信号识别、解调分析等工作。系统主机为全铝合金结构,配备了15.6英寸显示屏和防震硬盘、各种接口、锂电池,以及高性能电源管理软件。 设备硬件采用射频直接采样和数字下变频结构

TFN CH900系列便携式监测接收机的优势和特点
TFN CH系列便携式监测接收机针对信号搜索、无线电监测、窃听检测、安全调查、干扰查证等任务设计,能完成信号识别、解调分析等工作。 频率范围最高可达到18GHz,系统主机为全铝合金结构,配备了高性能15.6英寸显示屏和防震硬盘、各种接口、锂电池,以及高能效电源管理软件。利用随机提供的应用软件及第三方开发包,用户可以便捷搭建各种测试及监控系统,用于不同的应用场合 功能特点
Septentrio接收机二进制的BDS b2b改正数解码
Galileo的HAS和BDS B2b改正数为实时PPP提供了可能,要实现实时PPP解算,必须对对应的数据进行解码。由于没有做过解码的工作,现结合qzsl6tool代码对Septentrio的解码代码进行学习。 1. 二进制帧头的识别和解码 定义一个读取数据的类,通过传递文件名进行数据读取,并通过帧头去提取独立数据帧: 2. 二进制帧体的识别和解码 上述代码读取数据后,将98
北斗导航 | 同步双星故障的BDS/GPS接收机自主完好性监测算法
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 同步双星故障的B
一个简单的小程序,让你的手机摇身变成外汇行情接收机
#property indicator_chart_windowextern int 间隔分钟=10;datetime NextTime=0;int start() { if( TimeLocal()>NextTime) { SendMail( Symbol()+DoubleToStr(Close[0],Digits),"" );
STM32定时器输入捕获航模接收机信号
STM32定时器输入捕获航模接收机信号 前言一、舵机信号(PWM)二、STM32输入捕获功能框图三、输入捕获初始化结构体定义及说明三、代码 前言 最近在做一个检测航模接收机输出的舵机信号,并根据信号不同执行相应功能的小项目。硬件部分使用的是STM32F103C8T6通用定时器TIM3的通道1和通道2分别做两路信号的输入捕获(Input Capture)。 提示:以下是本
北斗导航 | 接收机自主完好性监测算法研究成果及研究团队介绍
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 近年来,接收机自主完
北斗导航 | 电离层对接收机自主完好性监测算法可用性的影响
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 电离层对接收机自
航空大数据——使用FineBI对ADS-B接收机布站情况及报文分析
这个专题的前面三篇文章主要是由ADS-B报文系统预测飞机坐标,偏向于数据应用。本文主要是对ADS-B接收机的数据做分析,为接收机的维护和增设提供依据,偏向于数据分析。 本文相当于是对前文数据集的再利用,再分析。使用FineBI作为分析工具,机缘巧合碰到了这个软件,个人感觉在数据可视化上,用起来要比MATLAB方便一点。 本文只是提供分析思路,所有可视化分

深度通信网络专栏: ComNet for OFDM接收机——深度学习与传统理论的结合
本文地址:ComNet: Combination of Deep Learning and Expert Knowledge in OFDM Receivers 文章目录 前言文章中心思想全文概览系统模型训练流程仿真结果算法信道估计信号检测复杂度分析几点疑问 前言 深度通信网络专栏: 快速上手: 2018-2019年最新深度学习用于无线通信(物理层)的论文整理,附论文

北斗导航 | 基于恒定虚警率算法的接收机自主完好性监测(附Matlab代码)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 基于恒定虚警率

成功升级中九MJ5812-2A接收机
还没放假的时候,爸爸就说,家里头的中九机子不能用了,带个串口来,自己烧录程序。 前天开工。 ======== 我们这款机子的升级口,是四个针的,是四个杜邦线。 杜邦线没有带回来。直接用导线就行。 网友们说,下面这两个三极管的部分,就是刷机小板所具备的转换电路,具体实现的功能,我并不清楚。 据说这俩三极管,电阻什么的,使得RX和TX的电平均为0.

便携式AIS接收机dAI01
1.设备简介 AIS是指船舶自动识别系统(Automatic Identification System),船舶上有AIS收发机,AIS收发机会把船舶通过GPS定位获取到的本船的位置、速度等动态信息和船舶自己的船号、长宽等静态信息广播发射出去,其他用户通过AIS接收机可以获取到船舶的动态和静态信息,从而实现对船舶的监视。应用场景很多,主要就是需要能获取船舶动态信息的应用,可以有效
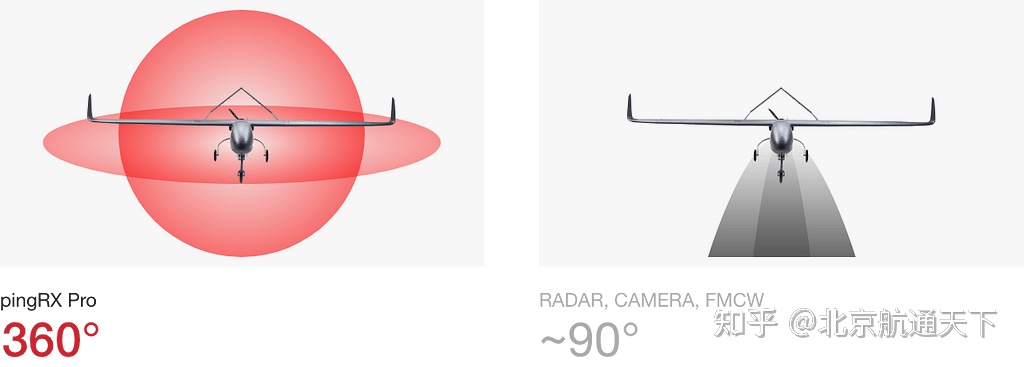
无人机ADS-B接收机 pingRX Pro
蒙大拿州比格福克——uAvionix 宣布发布 pingRX Pro,这是一款用于专业无人机系统 (UAS) 的新型检测和规避 (DAA) ADS-B 接收器。pingRX Pro 可检测在 978MHz 和 1090MHz 上运行的私人和商用飞机。接收到的飞机身份、位置和高度在移动地图上实时可视化,使 UAS 操作员或自动驾驶仪保持清晰。 新的 pingRX Pro 延续了 uAvionix
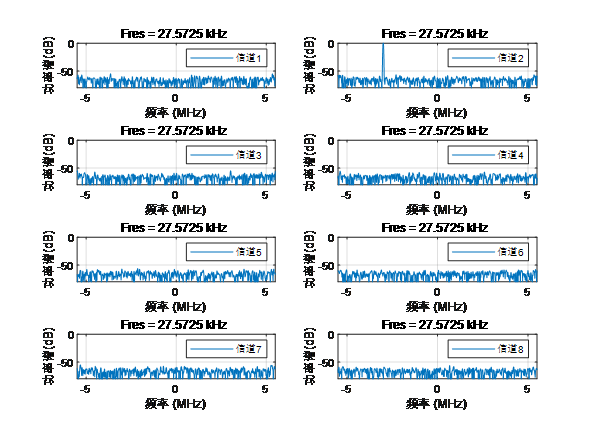
通过仿真理解信道化接收机分析过程
概要 信道化从子信道带宽划分上可分为临界抽取和非临界抽取两种,从各子信道中心频率布局上可分为偶型排列和奇型排列,从处理流程上可分为信道化分析与信道化综合过程。本文主要通过仿真来理解偶型排列/临界抽取/信道化分析过程。 基本原理 常规的数字接收链路,通过正交数字下变频将过采样数字谱中某个频带信号变频到基带,后通过数字低通滤波并抽取降速后输出。这种方式只能处理最大不超过二分之一采样速率的一个信道

接收机静态与动态的区别
在GNSS数据处理中,动态和静态是描述接收机状态的两个关键术语,下面介绍两者之间的区别: 区别(1)从GNSS接收机本身的运动状态来看: 动态模式:动态模式是指接收机处于移动载体上,如在车辆、飞机、船舶等移动平台上使用的接收机。动态模式下,GNSS接收机数据处理的特点: 接收机需要实时地获取并处理来自卫星的信号,一般通过接收机的内置算法完成。定位模式主要是伪距单点定位(SPP),用于米级的导

计讯物联高精度GNSS接收机:担当小型水库大坝安全监测解决方案的“护航者”
应用背景 水库大坝作为水利工程建筑物,承担着灌溉、发电、供水、生态等重任。一旦水库大坝发生安全事故,后果将不堪设想。因此,水库大坝的安全监测对保障水利工程顺利运行具有重要意义。 计讯物联作为水利行业专家型企业,多年来持续深耕水利行业领域,综合运用物联网、大数据、边缘计算等新一代信息技术,自主研发高精度GNSS接收机TN531与TN521,并将其应用于水库大坝安全监测解决方案,提升水库大坝安全监