本文主要是介绍接收机静态与动态的区别,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在GNSS数据处理中,动态和静态是描述接收机状态的两个关键术语,下面介绍两者之间的区别:
区别(1)从GNSS接收机本身的运动状态来看:
动态模式:动态模式是指接收机处于移动载体上,如在车辆、飞机、船舶等移动平台上使用的接收机。动态模式下,GNSS接收机数据处理的特点:
- 接收机需要实时地获取并处理来自卫星的信号,一般通过接收机的内置算法完成。定位模式主要是伪距单点定位(SPP),用于米级的导航定位;此外是高精度的相对定位(RTK),可以实现厘米级的高精度定位。
- 接收机通常需要更高的数据采样率,以满足动态环境下接收机位置的快速变化。
接下来对比几款常见GNSS模组的性能指标。
其中一些指标的概念如下:
【1】首次定位时间(TTFF)
首次定位时间TTFF(Time To First Fix)用于衡量接收机信号搜索过程的快慢程度,定义为接收机加电至其捕获第一个有效导航数据点所需的时间长度。其又分为冷启动、温启动和热启动。
冷启动是指GNSS接收机在时间、位置、当前星历均未知的情形下定位所需的时间,如接收机初次使用时,电池耗尽导致星历信息丢失时,关机状态下,接收机移动100公里以上的距离。冷启动定位所需的时间最长。温启动是指接收机在时间和历书已知、无星历、距离上次定位100公里以内的启动。热启动是指时间、历书及星历均已知,位置距离上次定位点100公里以内的启动。
【2】频点
频点是给固定频率的编号。频率间隔都为200KHz。这样就依照200KHz的频率间隔从890MHz、890.2MHz、890.4MHz、890.6MHz、890.8MHz、891MHz … … 915MHz分为125个无线频率段,并对每个频段进行编号,从1、2、3、4 … … 125;这些对固定频率的编号就是我们所说的频点;反过来说:频点是对固定频率的编号。
| 移远LC29H | UBLOX F9P | 和芯星通 UM980 | 司南导航 K803 | 天宝BD990 | |
|---|---|---|---|---|---|
| 支持星座数 | BDS GPS GLONASS Galileo QZSS | BDS GPS GLONASS Galileo QZSS SBAS | BDS GPS GLONASS Galileo QZSS | BDS-2 BDS-3 GPS GLONASS Galileo QZSS SBAS IRNSS L-band | BDS GPS GLONASS Galileo QZSS SBAS |
| 频点 | BDS:B1l,B2a GPS/QZSS GLONASS: Galileo:E1,E5a | BDS:B1l GPS:L1C/A GLONASS:L1OF Galileo:E1B/C QZSS:L1C/A,L1S,L5 SBAS:L1C/A | BDS:B1l,B2l,B3l, GPS:L1C/A,L1C, L2P(Y), L2C, L5 GLONASS: Galileo:E1,E5a QZSS:L1,L2,L5 | BDS-2:B1l,B2l,B3l BDS-3:B1l,B3l ,B1C,B2a,B2b GPS: L1,L1C,L2C, L2P, GLONASS:G1, Galileo:E1,E5a,E5b, QZSS: SBAS:L1 IRNSS:L5* | BDS:B1, B2, GPS:L1C/A,L2E, L2C, GLONASS:L1C/A, L2 C/A,L3 CDMA Galileo:E1,E5A, IRNSS: L5 QZSS:L1C/A,L1 SAIF, L2C, L5, LEX SBAS:L1 C/A, L5 |
| 首次定位时间 | 冷启动<26s 温启动<16s 热启动<1s | 冷启动<24s 热启动<2s | 冷启动<30s 温启动<20s 热启动<5s | 冷启动<20s 热启动<10s | 冷启动<45 s 温启动<30 s |
| 数据更新率 | GNSS:1HZ IMU:100HZ (最大) | RTK:20HZ | 50HZ定位 | 测量定位:20HZ RTK:20HZ | 50Hz |
| 数据格式 | LET,UMTS,TD-SCDMA, GSM | NMEA,UBXbinary, RTCM v. 3.3, SPARTN v. 2.0 | NMEA-0183,Unicore | NMEA-0183, | 差分CMR类,RTCM类 NEMA0183,Trimble GSOF |
下面是关于这些GNSS模组的产品手册链接,各位可自行查看:
UBLOX F9P:
ZED-F9P-04B Data sheet![]() https://content.u-blox.com/sites/default/files/ZED-F9P-04B_DataSheet_UBX-21044850.pdf
https://content.u-blox.com/sites/default/files/ZED-F9P-04B_DataSheet_UBX-21044850.pdf
移远LC29H:
“万物智联·共数未来”2023年移远通信物联网生态大会圆满落幕 | 移远通信
和芯星通 UM980:
产品_和芯星通_北斗导航芯片-北斗导航模块北斗高精度定位板卡国内外领先的芯片、OEM板卡和产品解决方案提供商Unicore Communications, Inc. is a one-stop provider of GNSS products, Unicore's products accuracy ranges from meter, sub-meter, to centimeter and millimeter level.![]() https://www.unicorecomm.com/products司南导航 K803:
https://www.unicorecomm.com/products司南导航 K803:
K803 GNSS丨北斗高精度定位模块_K8系列GNSS位模块_GNSS模块_北斗模块_导航定位产品_司南导航K803高精度定位定向GNSS模块是司南卫星导航基于具有完全自主知识产权的Quantum III开发的全系统全频点RTK定位模块。该 模块支持北斗全球信号,GPS、GLONASS、Galileo、 IRNSS、QZSS、SBAS等卫星信号,主要面向测量测绘、GIS信息采集等领域。https://www.sinognss.com/K803.html天宝BD990:
天宝BD990 Trimble BD990北斗定位GNSS板卡北京创宇星通科技有限公司是一家提供天宝BD990 Trimble BD990北斗定位GNSS板卡供销信息,介绍产品价格,厂家,批发信息, TrimbleBD990GNSS板卡 TrimbleBD990采用了Trimble新的Maxwell7技术,拥有336个通道,支持所有在轨运行的星座。 TrimbleB![]() http://bjcyxt.51sole.com/companyproductdetail_271397740.htm
http://bjcyxt.51sole.com/companyproductdetail_271397740.htm
静态模式:静态模式适用于固定或几乎不移动的接收机,例如在地面测量、地质勘探、科学研究等应用中使用的接收机。在静态模式下,接收机可以更多地专注于精确的测量和定位任务,而不需要应对快速的位置变化。静态模式下GNSS接收机数据处理的特点:
- 静态模式的接收机可以使用较低的数据采样率,并且更多地依赖信号质量和持续时间来提高测量的精度和可靠性。数据处理模式可以通过PPK或PPP处理,以获取高精度的定位结果。
区别(2)从GNSS数据处理角度来看:
首先,我们介绍一下目前使用较多的差分模式:单差、双差和三差。在RTK短基线测量中,我们常采用的是双差模式。非差观测方程提供了一个直观的描述,用于说明原始观测值与估计参数及其他误差参数之间的相互关系。换句话说,它帮助我们理解如何将观测数据与参数之间的差异进行消除或降低。伪距观测值和载波相位观测值的非差观测方程为 :
![]()
![]()
表示的是卫星,频率以及接收机;
![]() 表示原始伪距观测值 (m);
表示原始伪距观测值 (m);
![]() 表示原始载波观测值 (cycle);
表示原始载波观测值 (cycle);
![]() 表示频率 j上的波长 (m);
表示频率 j上的波长 (m);
![]() 为卫星与接收机之间的几何距离 (m);
为卫星与接收机之间的几何距离 (m);
![]() 表示接收机钟差和卫星钟差 (m);
表示接收机钟差和卫星钟差 (m);
![]() 分别为 L1 频点上的对流层延迟以及电离层延迟 (m);
分别为 L1 频点上的对流层延迟以及电离层延迟 (m);
![]() 为频率的比值;
为频率的比值;
![]() 分别为频率 j 上的接收机端和卫星端的伪距偏差 (m);
分别为频率 j 上的接收机端和卫星端的伪距偏差 (m);
![]() 分别为频率 j 上的接收机端和卫星端的载波相位偏差 (m);
分别为频率 j 上的接收机端和卫星端的载波相位偏差 (m);
![]() 为载波相位整周模糊度(cycle);
为载波相位整周模糊度(cycle);
![]() 为其他与频率无关的误差,如潮汐改正,地球自转效应,相对论效应,轨道误差等 (m);
为其他与频率无关的误差,如潮汐改正,地球自转效应,相对论效应,轨道误差等 (m);
![]()
![]() 均为其他未建模的误差 (m);
均为其他未建模的误差 (m);
以载波相位非差观测方程为例,主要介绍下单差和双差。
单差模式
单差模式是指保持卫星一致,将多个观测站的观测数据作站间差,将卫星钟差和星历误差进行消除。如果应用于短基线场景,两接收机的传播途径误差相似,也可以通过单差进行消除[22]。
对非差载波相位观测方程进行单差模式处理,可得
式中:
双差模式
联立卫星 s 与卫星i 之间的站间单差方程,可以组成站间星间二次差分(简称双差) 观测方程:
式中:

由于后续要在此基础上进行参数估计,因此采用前面介绍的线性化处理方法对其进行线性化处理,假设观测站T2的概略坐标为(X20,Y20,Z20),在两个观测站间的基线矢量(δX,δY,δZ)两观测卫星k和i中选取高度角较高的i为基准卫星,可得
线性化处理后,双差载波相位观测方程即为:
在GNSS定位的误差方程中,接收机坐标会作为待估参数,不同的处理模式对参数的处理存在差异。
- 动态模式下,方程会每个历元重新初始化接收机的坐标参数的方差,即无论接收机是静止还是运动,每个历元都重新估计接收机坐标,所以即便静态的接收机,采用动态解算模式,坐标也不会解算错误,只是坐标精度会稍差一些。
- 静态模式下,方程不会每个历元重新初始化接收机的坐标方差参数,随着数据处理的进行,接收机坐标的方差不断收敛,定位精度也不断提高。所以这种情况下如果使用动态数据来处理,会导致解算失败。
我们采用由Crustal Dynamics Data Information System(CDDIS)提供的国际GNSS服务(IGS)观测数据,包括GOP63440和GOPE3440。这些数据的时间范围为2020年12月9日0时0分0秒至2020年12月9日23时59分30秒。我们在RTKPOST软件上中分别使用静态和动态模式对其进行解算,对比静态和动态模式下坐标序列的差异:
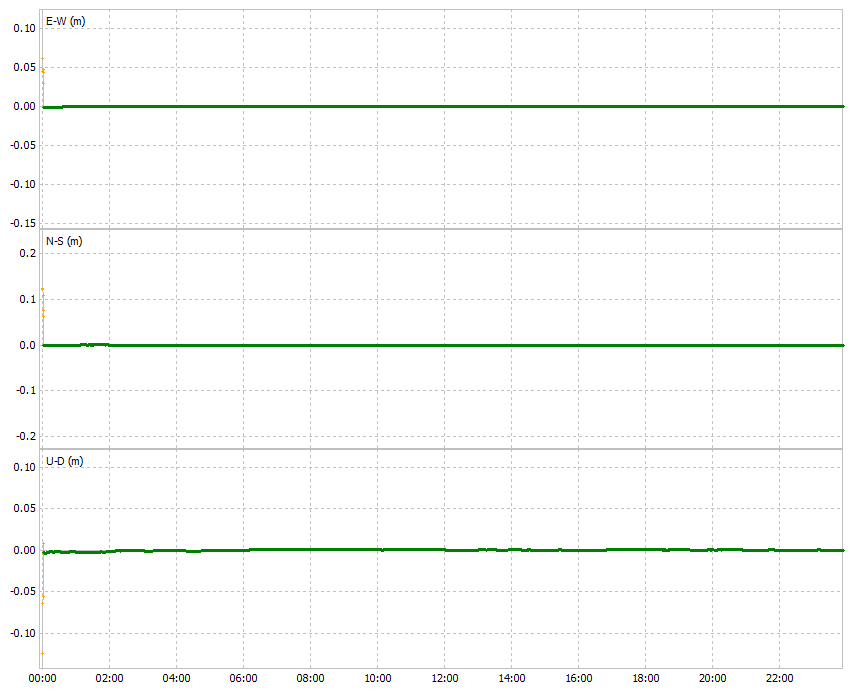
图 1 静态解算结果

图 2 动态解算结果

图 3 对比结果
我们对比发现,两种模式下的坐标序列图较为接近,但动态解算的结果有微小的误差,且坐标序列不断波动。具体分析后我们发现:
1.静态模式下的固定率为99.6%,而动态模式下的固定率仅为65.8%。
2.动态解算模式下的噪声或波动的影响更加显著。在静态固定解算中,噪声或波动的影响通常是较小的。这是因为静态解算假设物体没有运动,仅考虑接收机观测数据和初始位置。在这种情况下,由于物体静止,噪声通常会被平均化或被固定解的算法所抑制,从而对结果产生较小的影响。而动态解算考虑了物体的运动信息,包括速度、加速度等因素。因此,噪声或波动可能会在解算过程中引入一定的误差。特别是在高速移动或加速的情况下,噪声可能会对结果产生更大的影响。
3.
| E (m) | N (m) | U (m) | |
| 动态模式 | 0.0052 | 0.0093 | 0.0096 |
| 静态模式 | 0.0039 | 0.0083 | 0.0041 |
通过对比两种模式下的STD精度,我们发现该组基线在静态解算模式下的精度较高。
这篇关于接收机静态与动态的区别的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







