工况专题

2-82 基于matlab的多种工况下融合EKF的AUV定位误差
基于matlab的多种工况下融合EKF的AUV定位误差,工况1:AUV工况2:应答器基阵+速度传感器+角度传感器;工况3:AUV和AUV+速度传感器+角度传感器;工况4:应答器基阵;工况5:AUV和AUV+速度传感器+角度传感器+应答器基阵。程序已调通,可直接运行。 2-82 EKF的AUV定位误差 - 小红书 (xiaohongshu.com)
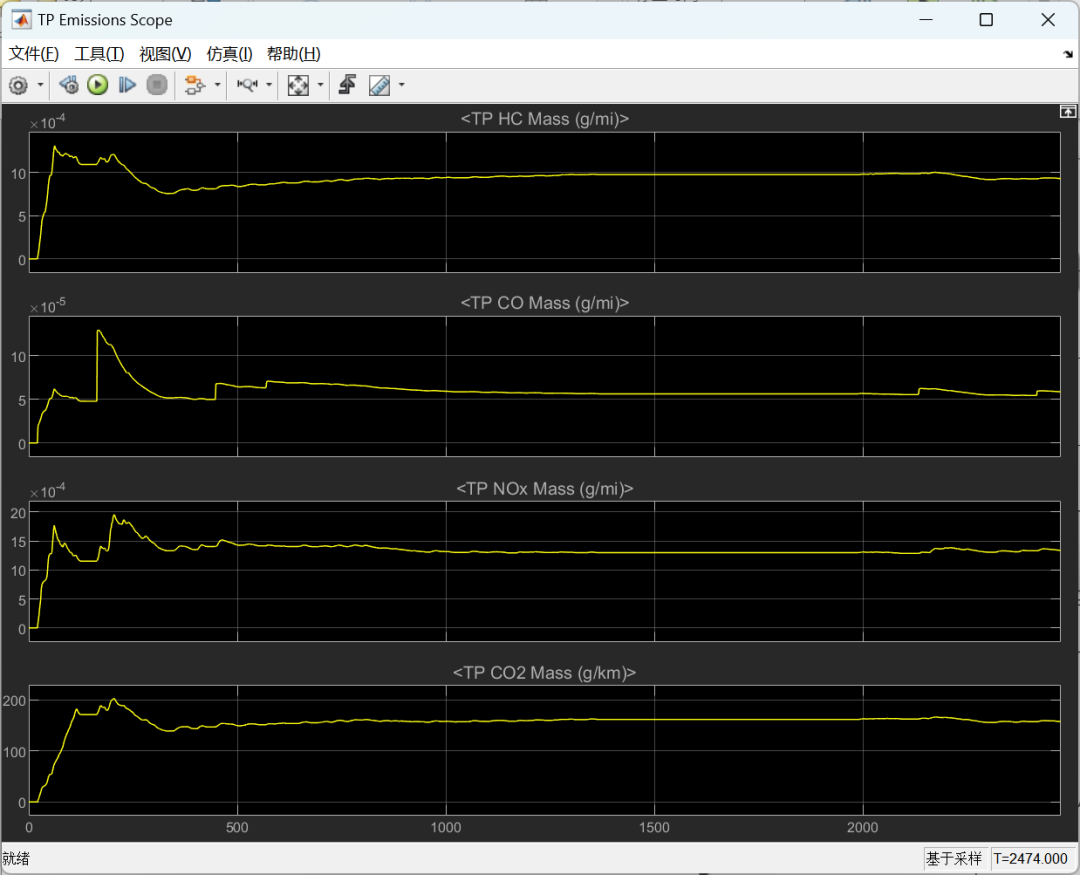
汽车油耗NEDC与WLTP有什么区别?以及MATLAB/Simulink的汽车行驶工况仿真
最近的热点新闻非比亚迪的秦L莫属,其油耗达到2.9L/100km,但其标注为NEDC也引起了讨论, NEDC与WLTP的区别 NEDC的全称为“New European Driving Cycle”,即“新欧洲驾驶循环”。这种油耗测试标准起源于上世纪80年代,主要是在实验室环境中进行,通过模拟市区和郊区驾驶循环而得出油耗数据。但是由于现实驾驶和模拟环境不同,现实驾驶环境更加复杂,所以NEDC测

【C#】【SAP2000】读取SAP2000中所有Frame对象在指定工况的温度荷载值到Grasshopper中
if (build == true){// 连接到正在运行的 SAP2000// 使用 COM 接口获取 SAP2000 的 API 对象cOAPI mySapObject = (cOAPI)System.Runtime.InteropServices.Marshal.GetActiveObject("CSI.SAP2000.API.SapObject");// 获取 SAP2000 模型对象c

窨井液位计的安装要考虑现场工况
窨井液位计是城市下水道进行水位测量的设备,跟工业现场的水位测量环境有着很大的不同,因为现场工况的限制窨井液位计一般是非接触式的测量同时是电池供电,这样在安装上就增加了难度。 窨井液位计的安装不仅要考虑到测量的准确性,后续的清理工作也是重要的环节。 最近我公司的客户在 一个超声波窨井液位计的现场在安装支架上犯了难,由于当地的下水道空间较小,同时底下的淤泥和垃圾容易堆积需要经常清理,当主机盒和电

基于视频的电熔镁炉工况识别系统→2.模型建立
基于视频的电熔镁炉工况识别系统→2.模型建立 《基于视频的电熔镁炉工况识别系统→2.模型建立》 该系统是一个高斯白噪声所驱动的一阶ARMA模型很多文献都这么写,且噪声,LDS_model.m imput:furnace_patches_724.matoutput: _n=20_nv=1_724.mat 724个视频的 A B C X C0=Ymean=w[k] Q调用

基于视频的电熔镁炉工况识别系统→3.模型合成
基于视频的电熔镁炉工况识别系统→3.模型合成 《基于视频的电熔镁炉工况识别系统→3.模型合成》 generateFromLDS.m input: 一个LDS模型的 A B C X0 C0=Ymean=w[k] output: I:图像序列 X:状态变量 描述header2 参数设置 123456789101112 %% parameter sett

基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→1.子空间角度...
基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→1.子空间角度 《基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→1.子空间角度》 subspaceAnglesAR.m input:sys1, sys2 output:theta n维 描述代码 一般来说,的q(p≥q)个主角定义为: 图 cosθ越大,θ越小,表明两个矩阵的距离越近 求解的q(p≥q

基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→2.四种距离
基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→2.四种距离 《基于视频的电熔镁炉工况识别系统→4.基于子空间角度的核函数→2.四种距离》 calculateMetricLDS.m input:_n=20_nv=1_724.mat 724个视频的 A B C X C0=Ymean=w[k] Q + 距离序号output:dist 距离矩阵调用subspace
基于Matlab/Simulink不平衡电网工况下级联H桥光伏并网逆变器仿真模型
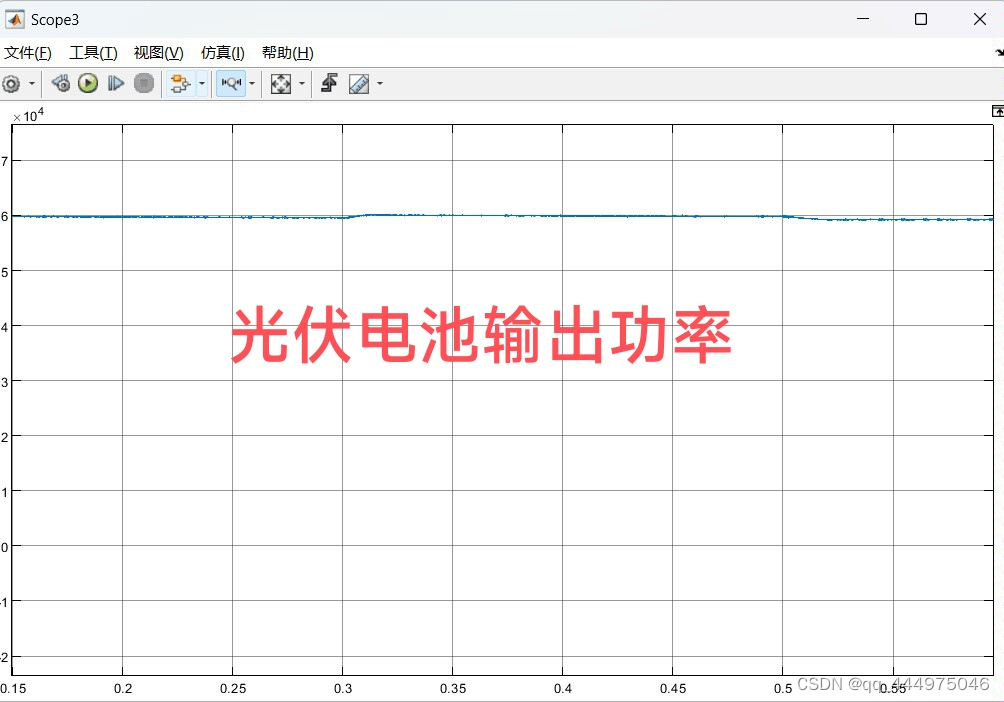
本次更新的内容为级联H桥光伏并网逆变器相关的控制,后面会针对储能系统在级联H桥拓扑上的应用进行分享。 由于传统发电造成的环境污染问题和光伏电池板价格持续创新低,太阳能从众多种类的可再生能源中拔地而起,因而光伏逆变器成为国内外学者和公司研究的重点。级联H桥多电平逆变器具有模块化易拓展、效率高、可以产生高质量的并网电流等优势,并且光伏电池板正好解决了该拓扑结构需要大量直流源的缺点, 因此级联H桥多
基于Matlab/Simulink不平衡电网工况下级联H桥光伏并网逆变器仿真模型
本次更新的内容为级联H桥光伏并网逆变器相关的控制,后面会针对储能系统在级联H桥拓扑上的应用进行分享。 由于传统发电造成的环境污染问题和光伏电池板价格持续创新低,太阳能从众多种类的可再生能源中拔地而起,因而光伏逆变器成为国内外学者和公司研究的重点。级联H桥多电平逆变器具有模块化易拓展、效率高、可以产生高质量的并网电流等优势,并且光伏电池板正好解决了该拓扑结构需要大量直流源的缺点, 因此级联H桥多

【java智慧工地源码】智慧工地物联网云平台,实现现场各类工况数据采集、存储、分析与应用
“智慧工地整体方案”以智慧工地物联网云平台为核心,基于智慧工地物联网云平台与现场多个子系统的互联,实现现场各类工况数据采集、存储、分析与应用。通过接入智慧工地物联网云平台的多个子系统板块,根据现场管理实际需求灵活组合,实现一体化、模块化、智能化、网络化的施工现场过程全面感知、协同工作、智能分析、风险预控、知识共享、互联互通等业务,全面满足建筑施工企业精细化管理的业务需求,智能化地辅助建筑施工企业进
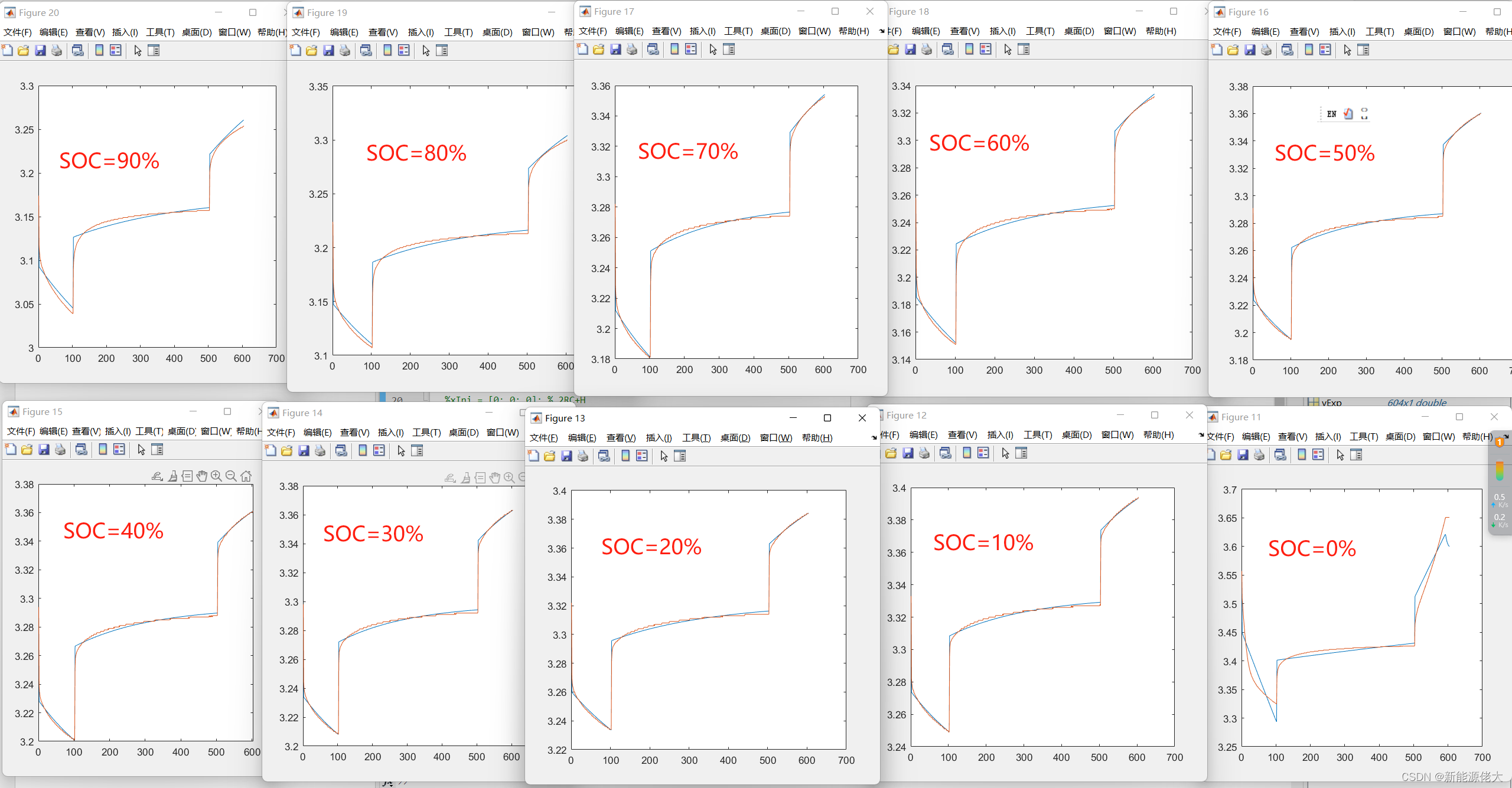
使用自定义函数拟合辨识HPPC工况下的电池数据(适用于一阶RC、二阶RC等电池模型)
该程序可以离线辨识HPPC工况下的电池数据,只需要批量导入不同SOC所对应的脉冲电流电压数据,就可以瞬间获得SOC为[100% 90% 80% 70% 60% 50% 40% 30% 20% 10% 0%]的所有电池参数,迅速得到参数辨识的结果并具有更高的精度,可以很大程度上降低参数辨识的时间,提高参数辨识效率。 1.首先是代码中要更改的参数,我们要根据我们不同的模型选择不同的初始值。 如

锂电池SOC估计基于二阶RC模型的扩展卡尔曼滤波估算SOC 验证工况:HPPC 和 1C放电
锂电池SOC估计基于二阶RC模型的扩展卡尔曼滤波估算SOC 验证工况:HPPC 和 1C放电 YID:9959673020484916
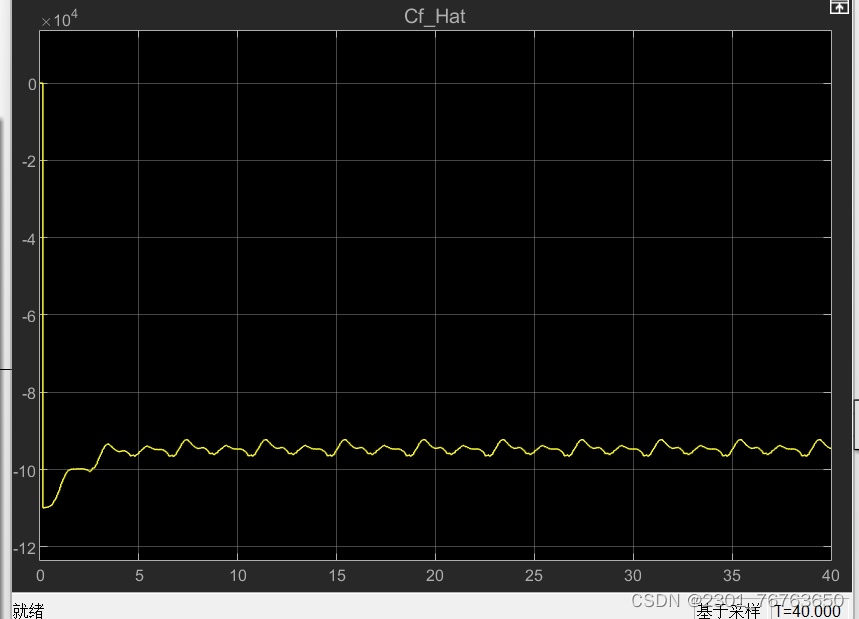
基于递归最小二乘法在线识别轮胎前后侧偏刚度 此模型也可用于其他工况下的刚度估计
1、基于递归最小二乘法在线识别轮胎前后侧偏刚度,图为在正弦曲线工况,估计侧偏刚度的大小,效果较好 2、此模型也可用于其他工况下的刚度估计,有需要的朋友可以自行去尝试 3、包含simulink模型和递归最小二乘侧偏刚度估计代码 ID:5679683038607954

三个角度分解永磁同步电机发电工况
永磁同步电机的工作根据电压电流的方向可以分为四种状态: 其中电动工况容易理解,逆变器将母线的直流电转化为交流电,驱动三相逆变电桥的占空比越大输出交流电压越高,电机转速越高。 但是发电工况则没那么容易理解,即使输出电压远小于母线电压,发电工况下电流依然能够流入母线,很多应用中为了避免发电工况下抬升母线电压,使用制动电阻消耗发电产生的能量,而新能源汽车则使用电池储存发电工况产生的能量以提升续航能

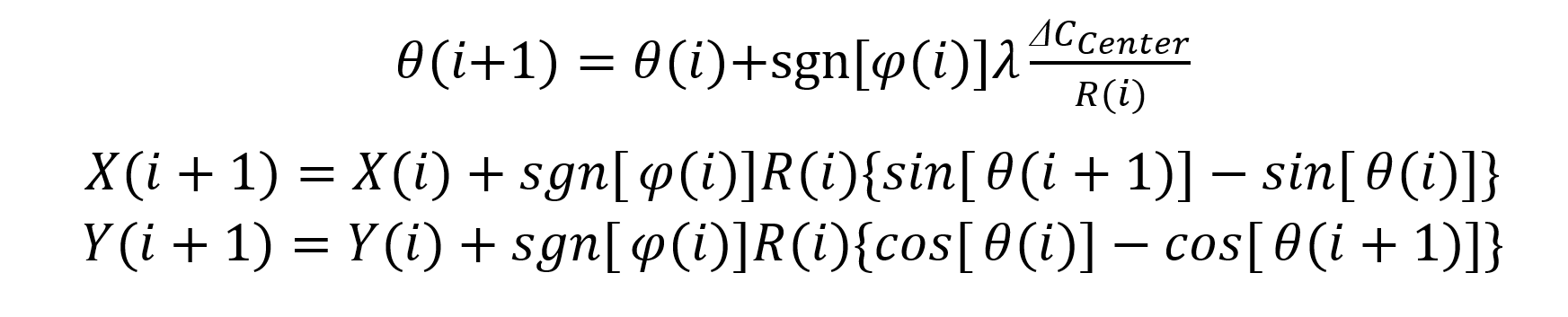
脉冲法和方向盘转角法计算车辆位置不同应用工况
1. 脉冲法计算车辆位置 在定义下的世界坐标系中,车辆运动分为右转后退、右转前进、左转后退、左转前进、直线前进、直线后退和静止七种工况,因此需要推倒出一组包含脉冲、车辆运动方向和车辆结构尺寸参数的综合方程式进行车辆轨迹的实时迭代计算。由于直线行驶和曲线行驶的半径分别是无穷大和正常值,因此分为直线行驶和曲线行驶两种工况。在以下公式推导中,所有弧长和弦长微元值无符号,而车辆偏航角微元值带正负。