巡线专题

齐护K210系列教程(三十四)_视觉PID巡线小车
视觉PID巡线小车 1.前言2.简介3.代码讲解3.1初始化3.2.色块查找3.3色块分析3.3.1 区域13.3.2 区域2 3.4 侦测关键点部分3.4.1正常巡线3.4.2 右转路口 3.4.3十字路口3.4. PID计算 4.完整代码5.小车端程序6.参考程序联系我们 1.前言 本课程主要讲述如何使用AIstart_k210主板完成简单的PID寻线任务,并举例应用齐护小车

微信小程序uniapp+vue电力巡线任务故障报修管理系统2q91t
uni-app框架:使用Vue.js开发跨平台应用的前端框架,编写一套代码,可编译到Android、小程序等平台。 前端开发:vue 语言:java+python+nodejs+php均支持 运行软件:idea/eclipse/vscode/pycharm/wamp均支持 框架支持:Ssm/django/flask/thinkphp/springboot/springcloud均支持 数据库

基于opencv的视觉巡线实现
前言 这段时间在和学弟打软件杯的比赛,有项任务就是机器人的视觉巡线,这虽然不是什么稀奇的事情,但是对于一开始不了解视觉的我来说可以说是很懵了,所以现在就想着和大家分享一下,来看看是如何基于opencv来实现巡线的。我这里以ubuntu20.04为例了 正文 1.查看相机设备 首先要完成视觉巡线那必不可少的就是相机了,使用 ll /dev/video* 来查看相机。 这里可以看
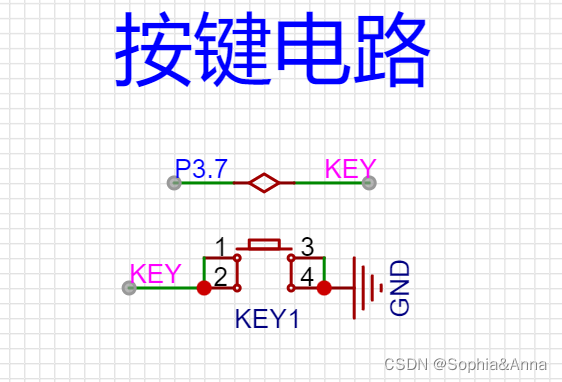
STC8H8K蓝牙智能巡线小车——3.按键开关状态获取
电路分析 引脚为P37开关未按下时,P37是高电平开关按下时,GND导通,P37是低电平 编程思路 Driver目录中添加KEY.h文件,应包含引脚定义、开关GPIO实例化函数、开关状态获取函数以及当按下和未按下时执行不同的函数(函数指针作为函数参数)Driver目录中添加KEY.c文件,做具体实现 代码示例 KEY.H #ifndef __KEY_H#define __KEY_


基于MATLAB+PID算法实现小车巡线功能
资源下载地址:https://download.csdn.net/download/sheziqiong/85737921 资源下载地址:https://download.csdn.net/download/sheziqiong/85737921 一、实验原理 本次实验我们采用比例、积分、微分控制, 即 PID 控制, 来对小车的巡线功能进行调节, 更好地控制小车转向时左右两个车轮的速度。该算

Arduino板开发智能巡线小车
Arduino板开发 一. 小车接线1.1 L298N驱动模块与四个电机接线1.2 L298N与Arduino、电池接线1.3 四路循迹模块与Arduino接线 二. 编写循迹程序三. 注意事项 一. 小车接线 1.1 L298N驱动模块与四个电机接线 本教程采用1个L298N驱动四个电机,其接法为两电机并联为一组,在小车一侧,另一组同样方式连接在另一侧。以下为两种并联接法,不

4G5G防爆执法记录仪、防爆智能安全帽赋能智慧燃气,可视化巡检巡线,安全生产管控
随着燃气使用的普及,燃气安全问题日益突出。传统应急安全问题处理方式暴露出以下问题: 应急预案不完善:目前一些燃气企业的应急预案存在实用性不高、流程不清晰等问题,导致在紧急情况下难以迅速启动和有效执行。 部门协同不流畅:在紧急情况下,各部门之间的信息共享和协同工作能力有限,导致出现应急反应不及时、信息传递不准确等问题。 安全培训不重视:一些燃气企业对应急安全知识的宣传教育不够重视,导致员工对燃
一文学会制作11路数字量红外巡线小车!!!
目录 导言 一、小车概述 二、基础部分硬件概述 2.1、小车的眼睛——TCRT5000循迹传感器 2.2、小车的方向盘——舵机模块SG90/MG90 2.3、小车的腿——直流减速电机(TT马达) 2.4、小车的大脑——STM32F103C8T6最小系统板 2.5、小车的动力保障——L298N驱动模块 2.6、小车的能源——电源模块以及升降压模块 2.7、小车的血管——导线和开关

疫情让我使用V-rep仿真(结合pythonAPI)实现机器人视觉巡线+pid调速,
任务概要 1.背景介绍 1.1实现效果: 2.V-REP仿真介绍 3.实现 3.1选取机器人 3.2更改线形状操作 3.3视觉传感器 3.3.1视觉传感器选择 3.3.2视觉传感器介绍 3.4PythonAPI调用 3.4.1V-rep端通信配置 3.4.2Python的配置 3.4.3 函数库的导入
openmv巡线小车
目录 openmv巡线小车的功能:巡线,路口识别,90度大转弯,串口通信,数字识别,条形码二维码识别等 巡线如何实现: 路口识别如何实现: 串口通信 openmv数字识别方案: 往年电赛: 机器学习之线性回归(Linear Regression)算法_线性回归算法_落难Coder的博客-CSDN博客https://blog.csdn.net/u014297502/ar