本文主要是介绍齐护K210系列教程(三十四)_视觉PID巡线小车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
视觉PID巡线小车
- 1.前言
- 2.简介
- 3.代码讲解
- 3.1初始化
- 3.2.色块查找
- 3.3色块分析
- 3.3.1 区域1
- 3.3.2 区域2
- 3.4 侦测关键点部分
- 3.4.1正常巡线
- 3.4.2 右转路口
- 3.4.3十字路口
- 3.4. PID计算
- 4.完整代码
- 5.小车端程序
- 6.参考程序
- 联系我们
1.前言
本课程主要讲述如何使用AIstart_k210主板完成简单的PID寻线任务,并举例应用齐护小车的PID寻线图形化编程。
也可以采用 AIstart_Q1+扩展板(自带电机驱动等功能)的方式直接一个 K210主板就完成算法及电机运行,可以参考教程:【齐护人工智能小车学习套件】
原理:通过调用K210模块中现有的查找色块方法,获取偏移量和关键点(如十字路口,T字路口,起停线等)的位置数据,并将数据返回给小车进行巡线。
固件使用: firmware_2055KB.bin(齐护标准固件即可)
2.简介
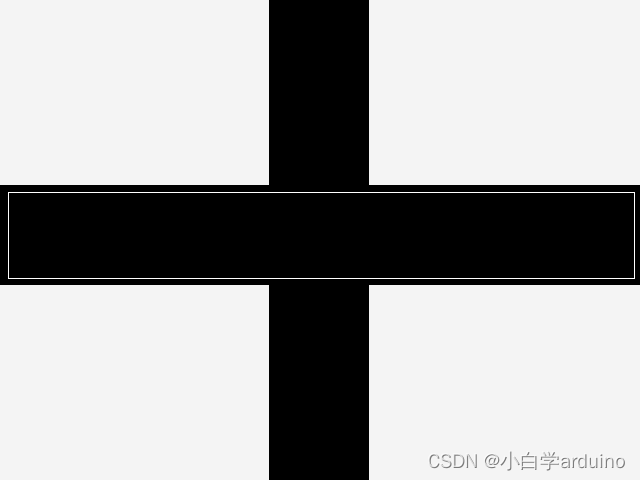
通过在指定区域寻找黑色块相对于屏幕的偏移量,并对偏移量进行PID运算后,将结果通过串口发送给小车执行。

如上图所示,在区域1(红色框内)内检测黑色块的中心点位置相对于屏幕中心的偏移量。
在区域2(红色框内)检测黑色块,用于判断是路口状态。
3.代码讲解
3.1初始化

用于PID运算的变量初始化,其中Kp,Kd为比例和微分系数。
串口初始化,用于K210向小车传送信息。
LCD初始化
摄像头初始化,为了颜色更好识别,摄像头为黑白模式。
将像素模式设置为灰度灰度模式对于只有两种颜色的地图可以起到提高帧数,过滤其它颜色的影响,提高了识别的正确率。
3.2.色块查找

从摄像头获取图像
对图像进行色块查找,参数意义如下:
图像:要查找的图片对象。
阀值:用LAB表示的颜色阀值,因为图像是灰度的,所以其范围为0~255(黑到白)
区域:要检测的区域。
滤掉区域:面积阈值,如果色块被框起来的面积小于这个值,会被过滤掉,减少干扰提高巡线准确度
滤掉素数:像素个数阈值,如果色块像素数量小于这个值,会被过滤掉,同上面作用相同。
合并:为边界,如果设置为1,那么两个blobs如果间距1一个像素点,也会被合并。此参数只在检测关键点寻找色块函数中运用,可以更明确的侦测出关键点,如Y型路口。
重叠:为真时,将所有重叠的blob合并为一个。
3.3色块分析
3.3.1 区域1

判断是否检测到黑色色块。
对检测结果就行迭代。
结果内会返回色块的信息,如坐标,中心点等数据,使用这些数据可以在图像上标注出其位置。
将色块的中心点传送到PID计算函数就行位置计算,并得到偏移量。
将偏移发送给小车执行.
3.3.2 区域2
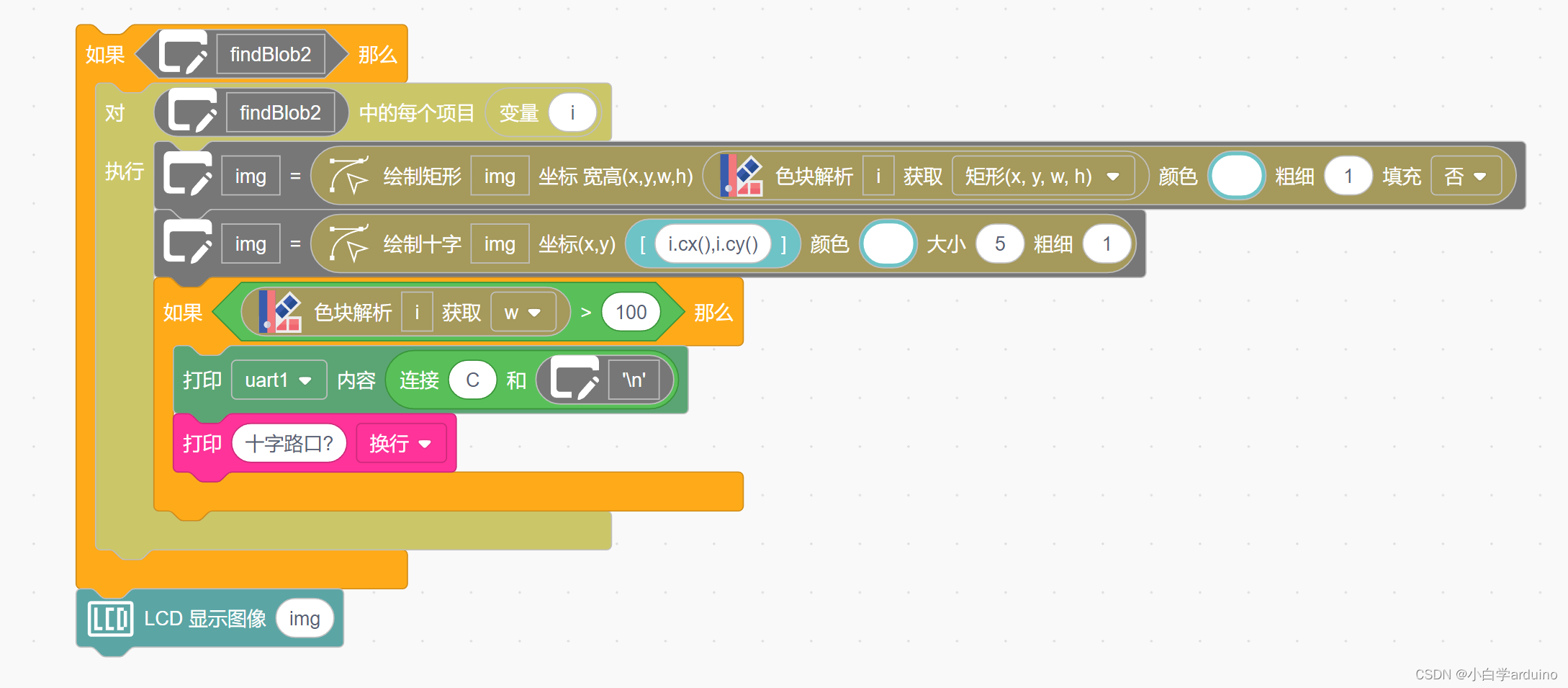
判断是否检测到黑色色块。
对检测结果就行迭代。
结果内会返回色块的信息,如坐标,中心点等数据,使用这些数据可以在图像上标注出其位置。
通过其宽度参数给于不同的判断,并将结果发送给小画执行。
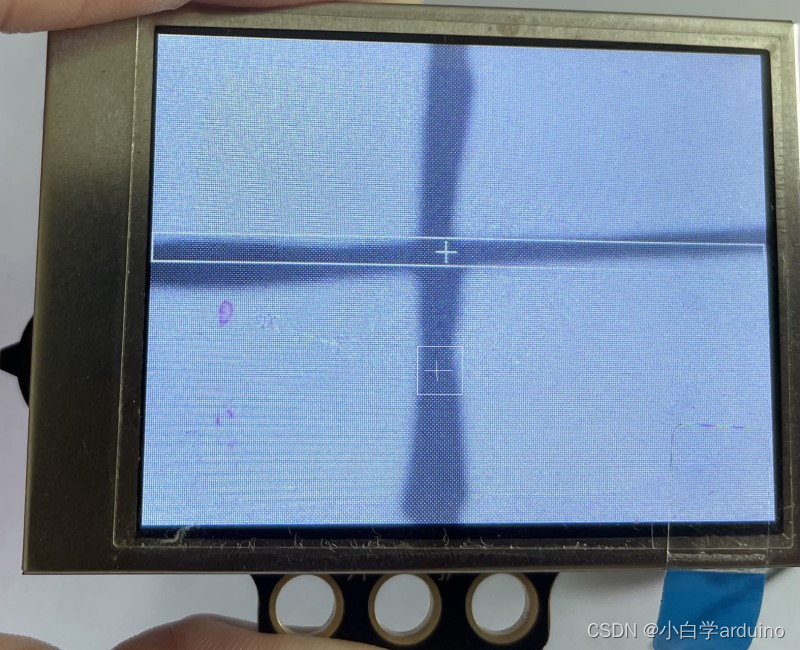
将图像显示在屏幕上。
3.4 侦测关键点部分
当要经过十字路口,y型路口,起停线时,可以通过判断对像的宽度值来区分。(区域2内进行分析)

3.4.1正常巡线
正常巡线宽度会比较小

3.4.2 右转路口
可以将长方体的中心坐标输出,当在屏幕左边时代表是左T型路口,在右边时侧是右T型路口。

3.4.3十字路口
只需要判断色块的宽度和中心坐标就可以区别出不同的路况。
3.4. PID计算

- 声明全局变量,在函数中使用全局变量需要声明,否则会被视为局部变量。
- 传入的x坐标为屏中心点为0点。
- P项为偏差乘系数
- D项为与上次的偏差的差乘以系数
- 输出数据
其中的 Kp 和 Kd 是巡线PID的参数没有使用到积分参数,Kd设置为0的原因是因为仅仅调节Kp时巡线就已经很稳定了,如果你的小车仅靠Kp无法达到稳定或者出现了高频振荡,请自行调节Kd。
4.完整代码
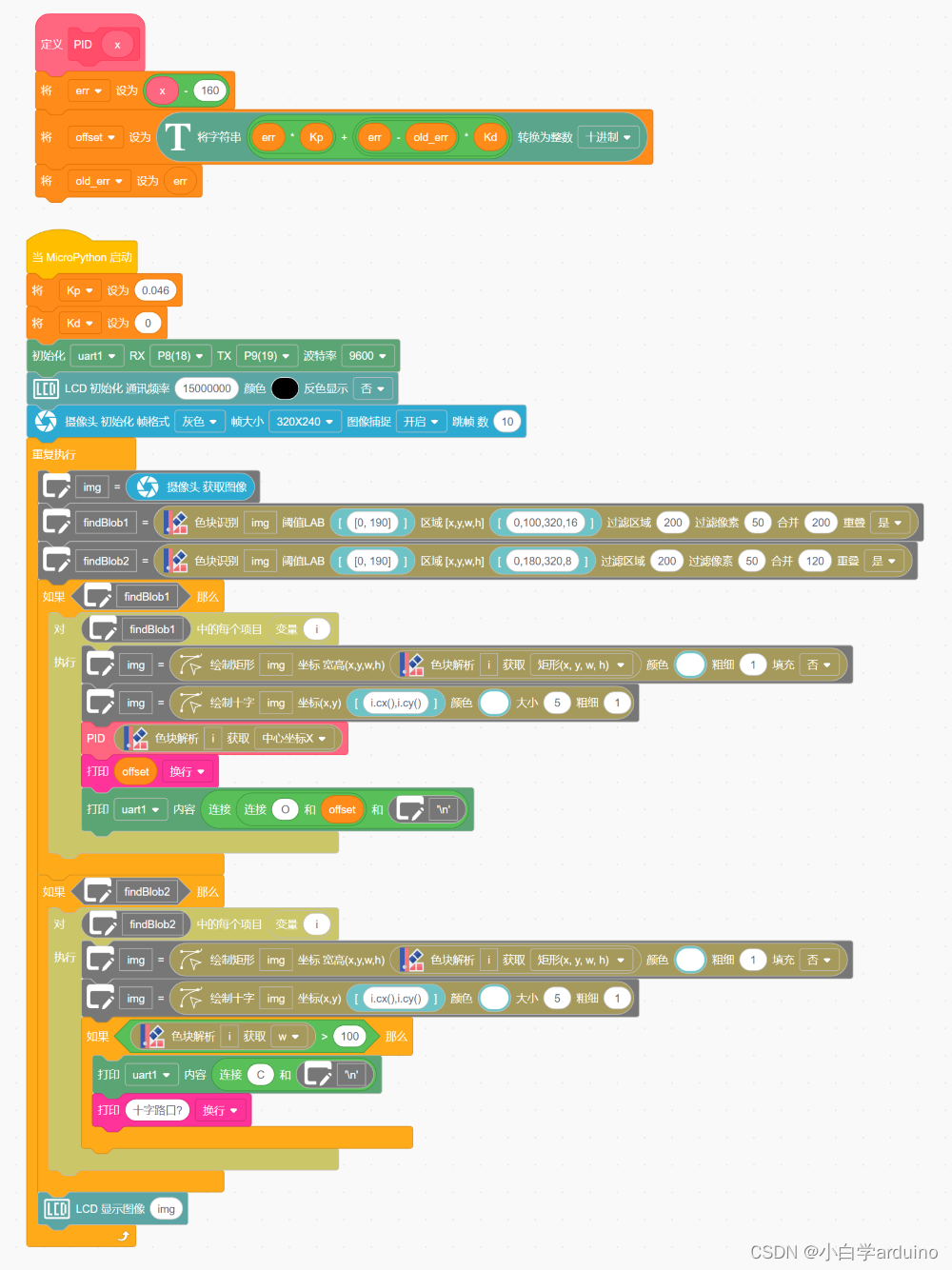
上传程序后测试,可以看到对应的输出数据。
5.小车端程序
以齐护编程小车为例,核心为ArduinoUNO 328P主控。
小车端程序主要是对串口数据进行处理,在K210端我们的18-19为串口数据输出端,对接我们小车上的A2-A3,波特率为9600要相同,TX-RX交叉连接。

- 主串口的初始化
- 接收信息软件串口的初始化,波特率要与K210相同。
- 使用的中间变量的初始化
- 当串口收到数据时,开始接收数据。
- K210发出的每条数据都带了回车,读取这一段数据。
- 判断收到的数据是不是偏差数据
- 截取有效数据并转化为整数。保存在变量内用于控制小车的速度。
- 如果C开头则是路口类型,K210根据实际判断结果发送对应标志,在这里进行解析。也可以将宽度发送过来,在这里进行处理。
- 根据偏移量计算出电机的转速。
当偏差小于零时说明小车向右偏,需要增加左轮的速度,减小右轮的速度,反之亦然。
6.参考程序
齐护编程AIstart_k210巡线scratch
联系我们
扫码或者点这里加群了解更多!

Created by qdprobot
这篇关于齐护K210系列教程(三十四)_视觉PID巡线小车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







