本文主要是介绍基于MATLAB+PID算法实现小车巡线功能,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
资源下载地址:https://download.csdn.net/download/sheziqiong/85737921
资源下载地址:https://download.csdn.net/download/sheziqiong/85737921
一、实验原理
本次实验我们采用比例、积分、微分控制, 即 PID 控制, 来对小车的巡线功能进行调节, 更好地控制小车转向时左右两个车轮的速度。该算法的原理如下:
1.1 比例控制 §
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系, 当仅有比例控制时系统输出存在稳态误差。
1.2 积分控制 (I)
在积分控制中, 控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统, 如果在进入稳态后存在稳态误差, 则称这个控制系统是有稳态误差的。为了消除稳态误差, 在控制器中必须引入“积分项”。积分项对误差取决于时间的积分, 随着时间的增加, 积分项会增大。这样, 即便误差很小, 积 分项也会随着时间的增加而加大, 它推动控制器的输出增大使稳态误差进一步减小, 直到接近于零。因此, 比例+积分 (PI) 控制器, 可以使系统在进入稳态后几乎无稳态误差。
1.3 微分控制 (D)
在微分控制中, 控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件或有滞后组件, 具有抑制误差的作用, 其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”, 即在误差接近零时, 抑制误差的作用就应该是零。这就是说, 在控制器中仅引入 “比例”项往往是不够的, 比例项的作用仅是放大误差的幅值, 而需要增加的是“微分项”, 它能预测误差变化的趋势, 这样, 具有比例 + 微分的控制器, 就能 够提前使抑制误差的控制作用等于零, 甚至为负值, 从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象, 比例+微分 (PD) 控制器能改善系统在 调节过程中的动态特性。
PID 中比例控制 P 是主要的控制方法, 承担了 PID 控制中的大部分任务, 为了消除比例控制 P 留下的静态偏差, 增加了积分控制 I, 而微分控制 D 只为稳定而存在, 其稳定效果应该大于积分控制 I 的失稳效果, 在有大量噪音的系统中, 不适用微分控制 D。PID 控制器是一个完整的三项控制, 能够减少上升空间, 消除静态误差, 减少超调。
二、代码实现
2.1 准备工作
本次实验我们使用了V-REP提供的matlab接口实现巡线小车。
V-REP会默认造在本地地址的19997端口开放。在matlab代码中实现对该端口的连接:
% 初始化v-rep接口组件
vrep = remApi('remoteApi'); % using the prototype file (remoteApiProto.m)
vrep.simxFinish(-1); % just in case, close all opened connections
clientID = vrep.simxStart('127.0.0.1',19997,true,true,5000,5);
if clientID < 0disp('Failed connecting to remote API server');
同时将V-REP的接口文件remApi.m、remoteApiProto.m和动态链接库remoteApi.dll放置在matlab代码文件LineFollowingBot.m的同一文件夹下,则可以用matlab控制V-REP的仿真。
使用matlab启动仿真:
vrep.simxStartSimulation(clientID,vrep.simx_opmode_oneshot);
要实现巡线小车,需要获取小车前置摄像头的画面,依据画面进行速度的调整。小车有左、右两边的轮子可以控制。要先获取两边速度和摄像头的句柄,从而之后能对它们进行读取和修改:
% 获取速度和图片的句柄
[res, motorLeft] = vrep.simxGetObjectHandle(clientID,'Pioneer_p3dx_leftMotor',vrep.simx_opmode_blocking);
[res, motorRight] = vrep.simxGetObjectHandle(clientID,'Pioneer_p3dx_rightMotor',vrep.simx_opmode_blocking);
[res, camera] = vrep.simxGetObjectHandle(clientID,'Vision_sensor',vrep.simx_opmode_blocking);
控制小车使用PID算法,在这里,我们只考虑当前的误差比例和误差微分。先将当前误差初始化为0:
err = 0;
接下来,在无限循环中,获取小车的画面并通过画面进行调整。获取画面的代码如下:
code = 1;
while code[code, size, img] = vrep.simxGetVisionSensorImage2(clientID, camera, 1, vrep.simx_opmode_oneshot);
end
为了便于操作,调用simxGetVisionSensorImage2函数,使用句柄camera,直接返回黑白画面。如果图像获取成功,则返回值code为0,退出循环,否则获取失败,重新获取。
2.2 当前的误差分析
调用getErr函数获取当前误差和转向方向:
[new_err, direct_tmp] = getErr(img);
当前误差new_err为利用PD算法控制速度的依据,而direct_tmp为之后的转向提供方向判断,之后会详细说明。
getErr的具体实现如下。函数原型为:
function [err, direct] = getErr(img)
输入黑白图像img,返回小车当前和预期位置的误差和转向判断值direct。
考虑到小车的画面中会出现很多条路,而我们只期望小车走它脚下的路,因此我们希望对所有画面中的路进行一个误差分析:路的位置和小车脚下(即画面中点)的距离作为误差值,如此一来,依据路离中点的远近,就能判断它是否是小车要走的路。需要注意的是,路可能在中点位置的左边或右边,因此误差有正有负。要取误差的绝对值作为判断依据。在所有的路中,有两条路是我们值得关注的(如果画面只有一条路或者没有路,会采取单独的策略):一是离中点最近的路,也就是误差的绝对值最小的路。期望中,小车正在走的路往往正在脚下,因此这条路就是小车在走的路,我们希望小车继续沿着这条路走。二是离中点第二近的路。试想:如果出现了急转弯(角度大于90度的转弯),在逐渐接近转弯点时,小车会看见两条路:转弯前要走的路和转完后要走的路。到达转弯点,两条路合并为一条,再往前走则会偏移当前道路。因此需要判断什么时候进行急转弯、急转弯是左转还是右转。通过分析不难得到:转弯的方向就是转完后要走的路的位置,在左边则左拐,在右边则右拐。而正在转弯前的路和转完后的路迟早会汇合,因此转弯后的路迟早会变为距离中点第二近的路,以此就能判断急转弯的转弯方向。
那么如何计算路到画面中点的距离呢?考虑到路是有宽度的,可以找路的最左边和最右边的点的坐标,取均值作为路的位置。而画面大小为480*640,因此取640的一半320作为画面的中点。画面中越靠下的部分离小车越近,因此依据下面画面调整小车状态的优先级更高。我们考虑从下往上一行行遍历,如果当前行找到了路则进行误差分析,否则看上一行是否有路。这样一来就能有效处理间断路的问题。
首先初始化以下几个变量:
err = 1000000;
err2 = 1000000;
flag = 0;
direct = 0;
distance = 480;
其中err表示离中点最近的路的误差,err2表示离中点第二近的路的误差。注意误差可正可负,其绝对值表示到终点的距离。direct用于记录下一个急转弯预期的转向方向,为1或-1。如果没有转弯倾向则为0。因为找到一条路的当前位置,要找到路的左边和右边两个端点的坐标,flag用来表示下一个是寻找左边端点(值为0)还是右边端点(值为1)。distance表示当前遍历的画面的行号,从最后一行480行开始,依次往上遍历。
如果当前行没有找到路,则误差err不会更新,则需要找画面上一行,因此对err的值做一个循环判断:
while err == 1000000
虽然路是黑色的,即预期画面中的数值为0,但可能会有些许误差,因此我将低于20的像素值认为是路。从画面最左边遍历到最右边,进行如下判断:如果找到了像素值小于20的点,即找到了路,且flag为0,表示正在找路的左端点,则认为找到了,更新flag并记录左端点位置,赋值为l。否则,如果找到了像素值大于20的点,表示当前位置不再是路,且flag为1,则认为找到了右端点。记录坐标。此时,就已经找出了画面中一条路的左端点和右端点。二者的均值减去画面中心的坐标320作为其位置误差:
for i = 1:640if img(distance, i) < 20 && flag == 0l = i;flag = 1;endif img(distance, i) >20 && flag == 1r = i;flag = 0;dis = (r + l) / 2 - 320;
接下来依据误差值dis对err和err2进行更新。如果dis的绝对值小于err,说明新找到的路径就是离中点最近的路径。如果err还是初值1000000,则是找到的第一条路,还没有找到第二条最近的路,direct为0。
if abs(dis) < abs(err)if err == 1000000direct = 0;
否则,新的路成为最近的路,原先最近的路成为第二近的路,需要对err2和direct进行更新:
elseif err < 0err2 = err;direct = -1;
elseerr2 = err;direct = 1;
end
当然,最后还要对err进行更新:
err = dis;
再或者,新路是当前第二近的路,则直接用新路的误差进行err2和direct的更新:
elseif abs(dis) < abs(err2)err2 = dis;if err2 < 0direct = -1;elsedirect = 1;end
end
如果当前行没有找到路,则考虑画面的上一行,对distance进行递减。但是我们不希望对太远的地方的路进行判断,导致过远的路影响正常判断,因此到画面的上半部分则直接退出循环,不予考虑:
distance = distance - 1;
if distance <= 320break
end
如此一来,就得到了当前的误差err与下次急转弯的预期转弯方向direct,并进行返回。
2.3 PD算法控制小车速度
控制速度时,我们只考虑比例和微分部分。因为路径状况不稳定,不同的位置有不同的状态,因此积分控制可能会导致错误。
如果direct_tmp为0,说明其不带有方向性,不更新实际的方向direct:
if direct_tmp ~= 0direct = direct_tmp;
接下来就是PD算法的主体实现部分了。设定速度的基础值为1.2,比例和微分控制常量分别为0.02和0.001,计算速度的校正值:delta_v = kp * new_err + kd * (new_err - err);。考虑到误差值的正负表示转弯方向的左右,因此校正值的正负也是表示方向左右,也就是左右轮的速度差。得到矫正值后,左右轮速度分别为v + delta_v和v - delta_v。
v = 1.2;
kp = 0.02;
kd = 0.001;
% PD算法计算速度差
delta_v = kp * new_err + kd * (new_err - err);
err = new_err;
% 更新速度
vrep.simxSetJointTargetVelocity(clientID, motorLeft, v + delta_v, vrep.simx_opmode_oneshot);
vrep.simxSetJointTargetVelocity(clientID, motorRight, v - delta_v, vrep.simx_opmode_oneshot);
如此一来,小车就能正常依据画面状况来控制左右轮子的速度,从而实现寻路了。
2.4 对急转弯的单独讨论
实现上述算法后,在急转弯时小车并不能正确运行。这是因为依据我们的算法,急转弯的尽头小车依旧会找到路从而直走而不会转弯,从而冲出赛道,到达画面中看不到路径的地方。这样一来,就应该进行原地转弯找回原来的路。原来的路的方向就是我们之前的参数direct指定的方向。
画面中首次出现路时,往往在画面的最边缘,这时恢复原来的算法可能导致转向速度异常。因此我们考虑重复获取画面与转向,直到画面中心的最下面出现路,可以沿直线走位为止。
具体实现代码如下:
if min(min(img(:,:))) > 20% 进行旋转vrep.simxSetJointTargetVelocity(clientID, motorLeft, direct, vrep.simx_opmode_oneshot);vrep.simxSetJointTargetVelocity(clientID, motorRight, -direct, vrep.simx_opmode_oneshot);% 旋转到画面的中间出现出现路为止while img(480,320) > 20code = 1;while code[code, size, img] = vrep.simxGetVisionSensorImage2(clientID, camera, 1, vrep.simx_opmode_oneshot);endend% 更新误差err = 0;new_err = 0;
至此,小车的寻路算法已经基本实现。
三、实验结果
3.1 地图设计
我们设计的地图如下所示:
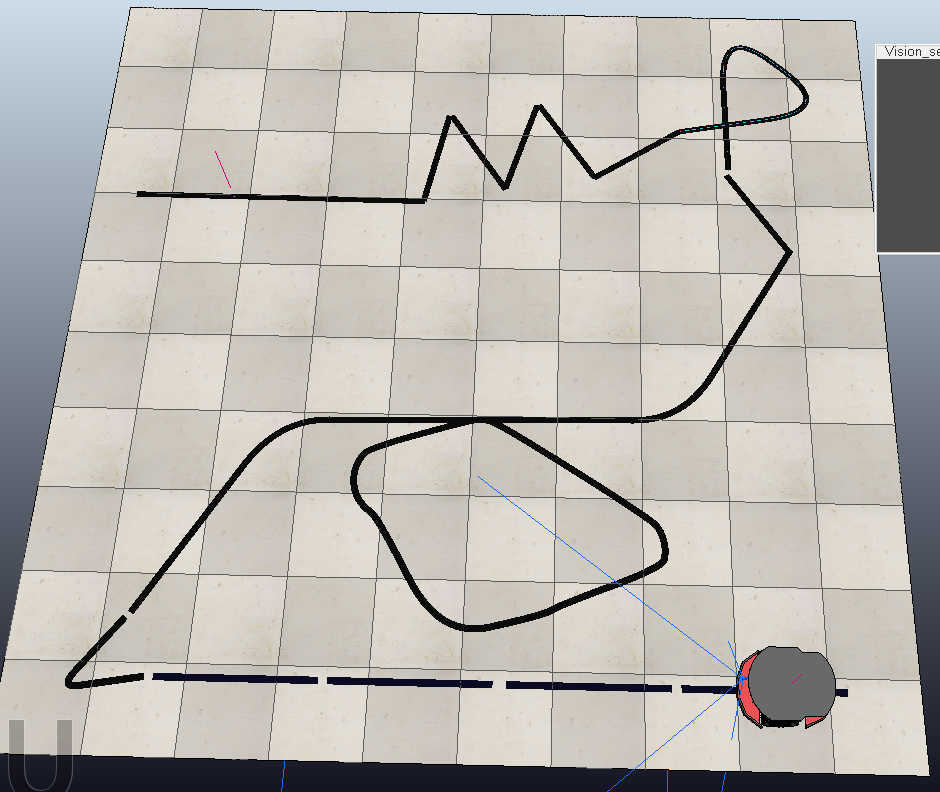
其中,有以下几个难点:
- 间断点

- 迷惑路径(注意下方的圆是期望不会走的路径,小车应该沿直线前进)
- 交叉路径

- 连续急转弯

3.2 小车运行结果
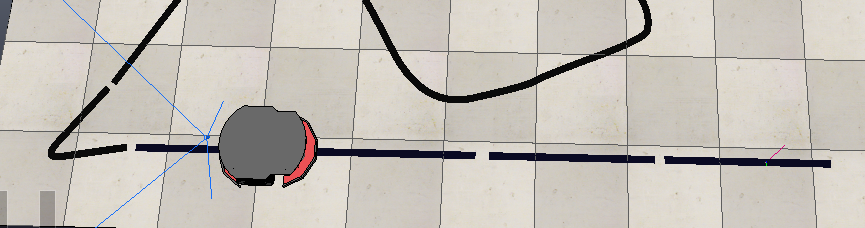
首先,小车能平稳通过间断点:
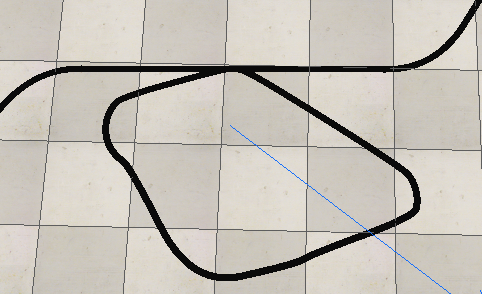
在遇到迷惑路径时,小车能够优先选择离中点进的路径,即转向要求小的路径,而不会进入中间的圆:


同样在交叉路径,能够正确选择路径:


而在连续急转弯的部分,和我们预期的一样,小车在急转弯尽头能依据之前画面得出的direct得到正确的转向方向,从而沿着正确的路径行走:

最终完成整个路径,小车的用时为91秒(见下面控制台的输出值):

连续急转弯的部分,和我们预期的一样,小车在急转弯尽头能依据之前画面得出的direct得到正确的转向方向,从而沿着正确的路径行走:
资源下载地址:https://download.csdn.net/download/sheziqiong/85737921
资源下载地址:https://download.csdn.net/download/sheziqiong/85737921
这篇关于基于MATLAB+PID算法实现小车巡线功能的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




