射影专题

正射影像、倾斜摄影测量相关软件汇总
从事倾斜摄影测量相关工作的同事经常会用到一些三维建模软件,使用过程中会发现不同软件的优劣势也有一定的区别,以下列举的软件排名不分先后,大家可以根据自己的工作和学习要求进行选择。 1.Pix4D Mapper Pix4Dmapper是一款专门用做测绘的软件,从数据采集(pix4Dcapture)到DOM、DSM及三维模型生产都有涉及。但是三维效果相对于samrt3D来说还是有些差距,但DOM正射
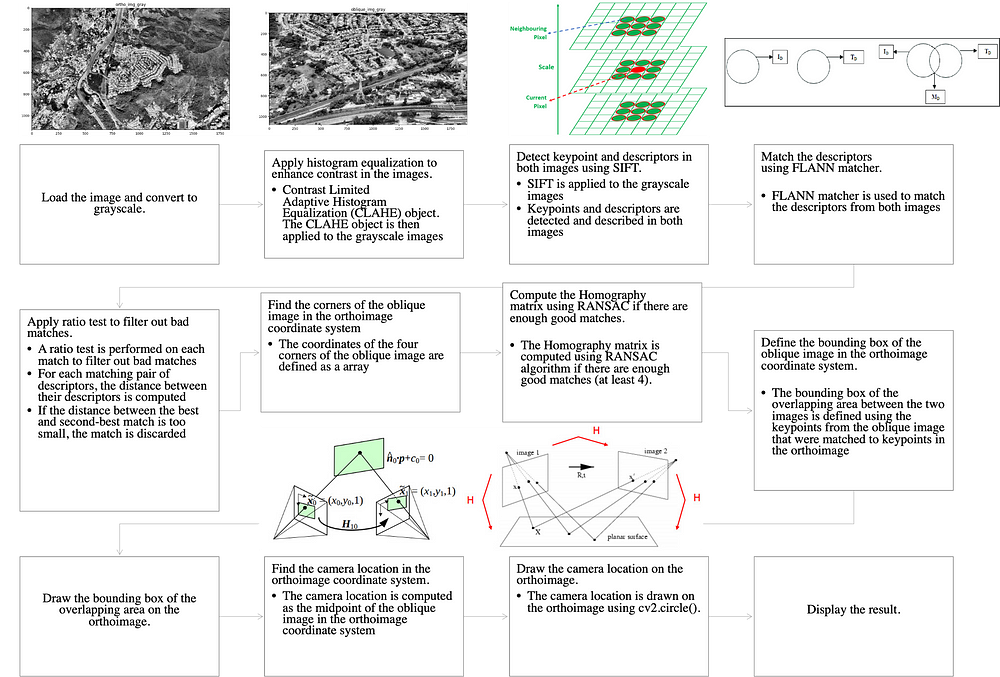
利用正射影像对斜射图像进行反向投影
在图像投影和映射领域,有两种类型的投影:正向投影和反向投影。正向投影涉及使用内部方向(即校准相机参数)将 3D 点(例如地面上的物体)投影到 2D 图像平面上。另一方面,向后投影是指根据 2D 图像确定地面物体的 3D 坐标的过程。 为了匹配倾斜图像和正射影像并确定相机位置,需要进行后向计算。在这种情况下,我们可以利用 OpenCV 库来帮助我们将倾斜图像粗略地映射回地面。


正射影像DOM房屋拉花扭曲检测和修复(升级版202312)
正射影像拉花扭曲检测和修复 更新点: 2023年12月对拉花、扭曲、变形的处理功能进行了升级,解决了更新后影像清晰度下降的问题,航片和卫片的拉花、扭曲、变形区都可以处理。 这次录制了简单的操作视频,可以看到处理的整个过程。 --------------------------------------------------------------------------------- 以

【GlobalMapper精品教程】067:基于无人机航拍照片快速创建正射影像图
文章目录 一、加载无人机照片二、创建正射影像三、导出正射影像四、worldImagery比对 一、加载无人机照片 打开globalmapper软件,点击打开数据文件。 选择配套实验数据data067.rar中的影像,Ctrl+A全选。 在globalmapper中,可以直接将照片加载为如下样式。 二、创建正射影像 切换到数字换工具,在地图上框选所有照片。
欧氏、相似、防射、射影变换
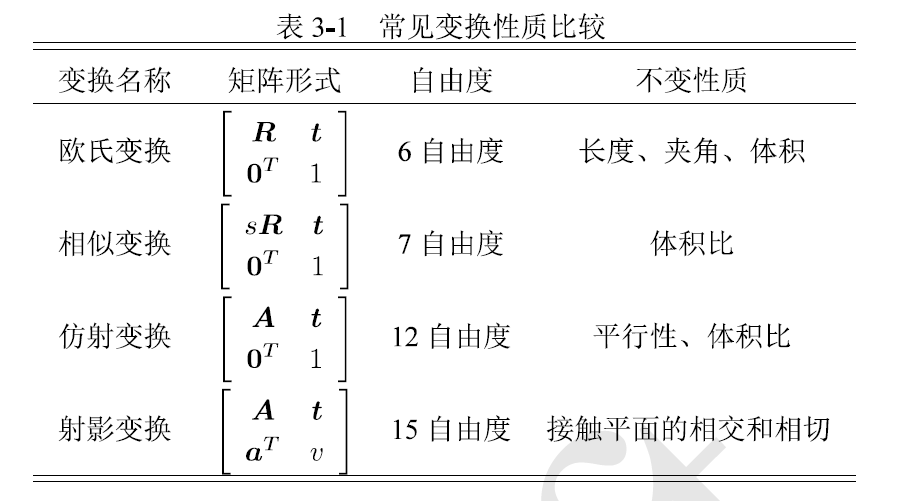
3D空间中的变换有:欧氏变换、相似变换、防射变换、射影变换。 欧氏变换:最简单的变换,它保持了向量的长度和夹角,相当于把一个刚体原封不动的移动或者旋转。 相似变换:比欧氏变换多一个自由度,它允许对物体进行均匀的缩放。 防射变换:又叫正交投影,经过变换后,立方体不再是方的,但是各个面仍是平行四边形。 射影变换:最一般的变换。例如使用相机随意拍摄一个方形的地板砖,在照片中的样子,它不再是方的,
【射影几何13 】梅氏定理和塞瓦定理探讨
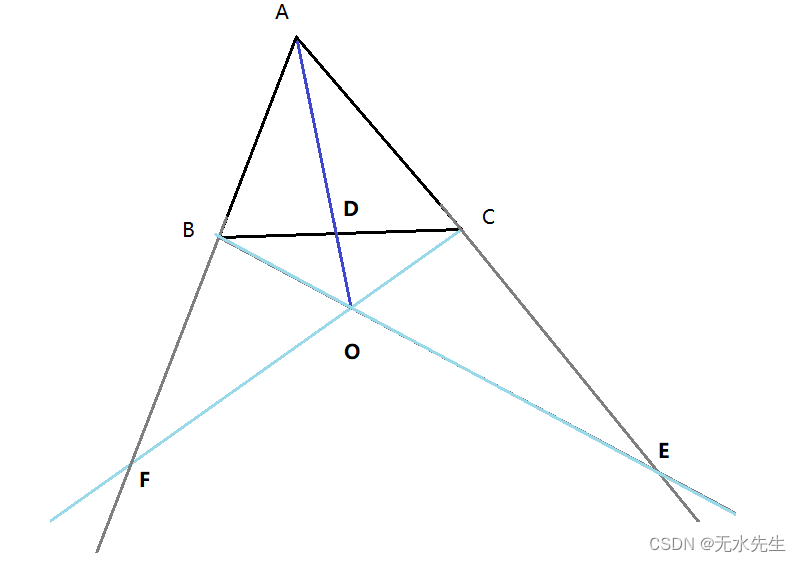
梅氏定理和塞瓦定理 目录 一、说明二、梅涅劳斯(Menelaus)定理三、塞瓦(Giovanni Ceva)定理四、塞瓦点的推广 一、说明 在射影几何中,梅涅劳斯(Menelaus)定理和塞瓦定理是非常重要的基本定理。通过这两个定理,可以导出多项结论,如:极点-极线性质、德萨格定理、pascal定理等;本篇专门叙述这两个定理证明。及相关启发。 二、梅涅劳斯(Menel

图像变换:刚性变换(等距变换、欧式变换)、相似变换、仿射变换、射影变换(透视变换、投影变换)
刚性变换(等距变换、欧式变换)、相似变换、仿射变换、射影变换(透视变换、投影变换) 1.刚性变换:只对物体进行 平移 和 旋转,而形状不变 2.相似变换:等距变换 + 均匀缩放,类似相似三角形,比例不变 3.仿射变换:旋转+平移+缩放+切变shear,保持平行性 4.透视变换:旋转+平移+缩放+切变+射影 在三维空间上进行变换: 不保留平行性 射影变换的不变量是:

【射影几何11】完全四边形和交比研究
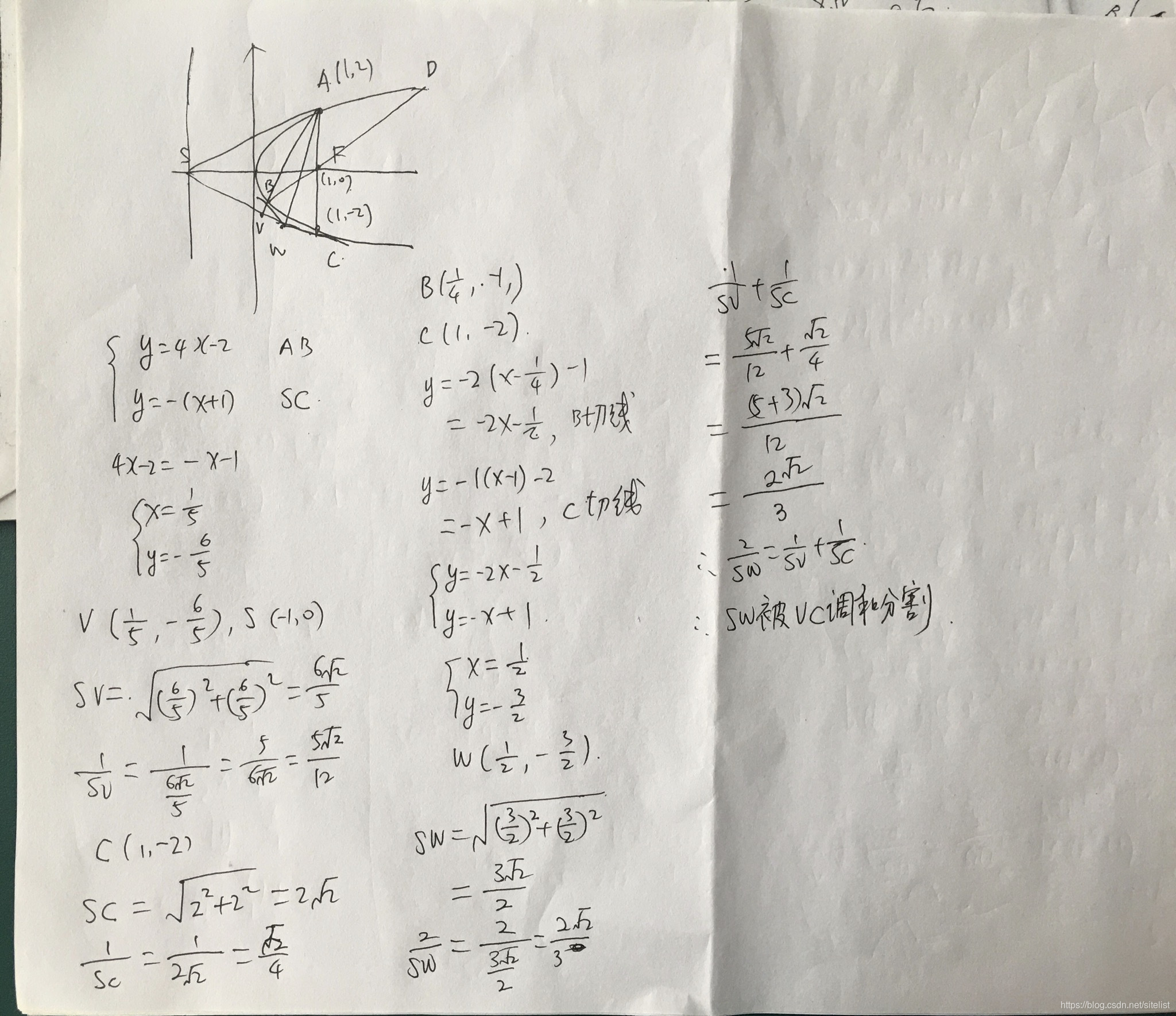
一、说明 对于交比的灵活应用,尚有许多情况需要讨论,首先引出完全四边形的例子,该关键词的应用非常普遍;其次,我们尝试用交比证明一些事实;随后我们又引出交比射影案例的特殊情况。 二、完全四边形 2.1 完全四边形定义 【定义】完全四边形,就是存在四条线,其中不允许出现三条线共点,那么四条线围成的区域,即是完全四边形。 讨论:什么不是完全四边形? 上图,退化成三边形,不是完全四边










【GlobalMapper精品教程】067:基于无人机航拍照片快速创建正射影像图
文章目录 一、加载无人机照片二、创建正射影像三、导出正射影像四、worldImagery比对 一、加载无人机照片 打开globalmapper软件,点击打开数据文件。 选择配套实验数据data067.rar中的影像,Ctrl+A全选。 在globalmapper中,可以直接将照片加载为如下样式。 二、创建正射影像 切换到数字换工具,在地图上框选所有照片。

正射影像矫正--基于无人机图片
1.大致总体过程 这是通过为每个较小的正射影像定义一个多边形来实现的,这些多边形由接缝线分隔。要创建初始的接缝线网络,可以使用 Voronoi 图算法。 以下是该过程的概述: 小正交图像: 从一些较小的正交图像开始。 接缝线: 相邻正射影像之间的边界称为接缝线。 接缝线网络: 所有的接缝线相互连接,形成一个接缝线网络。该网络有助于定义较小的正射影像之间的关系。 沃罗诺图算法: 要生成初

大疆P4M多光谱正射影像拼接图条带问题
精灵 4 多光谱版无人机自 2019 年发布以来,已经在科研、农业、林业、环境生态监测等多个领域得到广泛应用。作为首个集成度优秀的国产多光谱遥感系统,其便携性、易用性受到了诸多科研用户的青睐。然而,在使用过程中暴露出了各种问题也让用户头痛不已,其中辐射校正和镶嵌影像的条带问题最为严重。 为帮助用户更好地使用产品,本人于5月份对其辐射标定方法进行了深入分析,提出利用光强校正+经验校正结合的辐射标定
正射影像DOM房屋拉花扭曲检测和修复
正射影像拉花扭曲检测和修复 在日常内业生产中,不管是卫星影像还是航空影像,做完正射纠正或融合后,或多或少会出现大型山体、建筑、立交桥等地物出现拉花扭曲的现象,这主要是由于参与正射纠正的DEM局部高程值错误导致的。 本文介绍一种高效的DOM拉花扭曲检测和修改的方法: 使用天沐遥感影像处理系统-PhotoMap,通过“异常检测”功能实现DOM拉花扭曲区域的快速检测和标记;通过修改局部DEM高程值
OpenSSL密码库算法笔记——第5.4.7章 椭圆曲线点的射影系数
设置射影系数就是将分别对射影点point的X、Y、Z分量赋值: point->X←x,point->Y←y,point->Z←z。 …………(5.4) 如果希望在今后的计算中提高运算效率,可以将各分量(大整数)转化成Montgomery整数后再做对应的赋值: point->X←to_mont(x), point->Y←to_mont(y), point->Z←to_mont(z