四轴专题

基于STM32和人工智能的智能四轴飞行器系统
目录 引言环境准备智能四轴飞行器系统基础代码实现:实现智能四轴飞行器系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统4.4 用户界面与数据可视化应用场景:智能飞行器管理与优化问题解决方案与优化收尾与总结 1. 引言 随着无人机技术的发展,智能四轴飞行器在娱乐、农业、安防和物流等领域得到了广泛应用。通过结合STM32嵌入式系统和人工智能技术,可以实现更智能的飞行控制和数据处理,

四轴飞行器、无人机(STM32、NRF24L01)
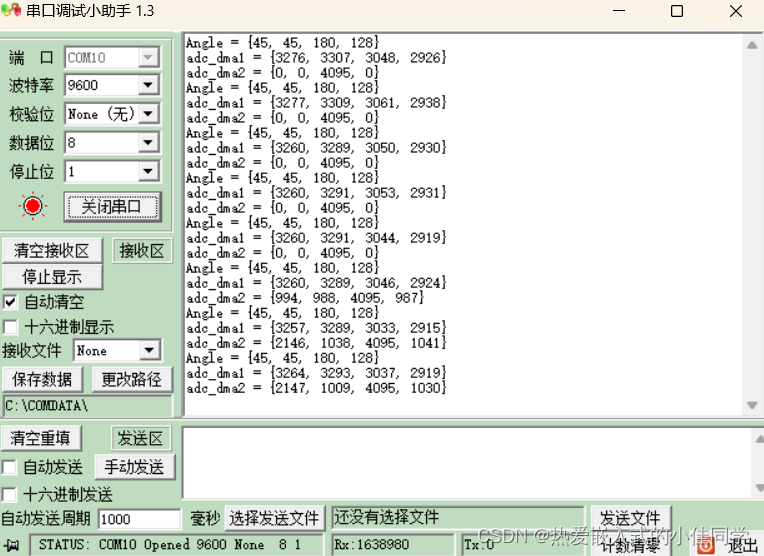
一、简介 此电路由STM32为主控芯片,NRF24L01、MPU6050为辅,当接受到信号时,处理对应的指令。 二、实物图 三、部分代码 void FlightPidControl(float dt) { volatile static uint8_t status=WAITING_1; switch(status) { case WAITING_1: //等待解锁 if(


四轴飞行器玩具软件技术服务
广东四轴飞行器玩具软件技术服务。 东莞市酷得智能科技有限公司成立于广东省东莞市松山湖高新产业园区,我们专注于电子类方案开发设计,提供多类型的IC采购服务。 酷得的益智玩具软件方案定制服务旨在为客户提供一站式的解决方案,帮助其在竞争激烈的市场中脱颖而出。酷得将以专业的态度和技术实力,为您的项目保驾护航,实现共赢的目标。 方案定制服务包括以下几个方面: 1、功能定制:根据客户需

Delphi笔记(GL_Scene四轴飞行器模型)
有了前的一篇做铺垫,已经简单的说了GL_Scene的下载安装和一个简单的实例制作。现在就要开始制作一个3D的模型了,具体的步骤就不再这里多说了,直接上图和代码吧! 【第一版】先看一下最开始的版本吧,比较粗糙,自己感觉也有一点丑。 【第二版】在看了看匿名科创的上位机后,感觉自己的这个真的是一个屌丝呀!于是又修改了一下。 可是呢,修改了后看来还是感觉有一点点怪!不过还算看得下去。 【第三版

串级PID控制四轴飞行状态-分析
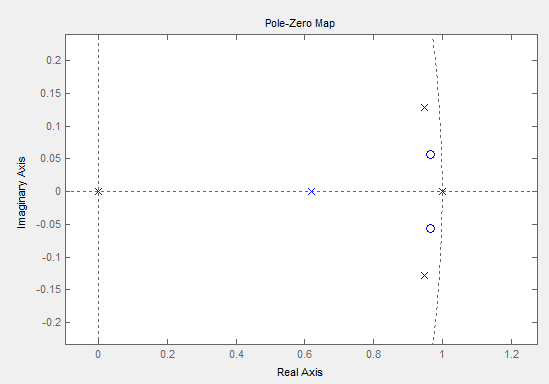
参考网页: http://blog.csdn.net/nemol1990/article/details/45131603 一、概念 单极PID:当你知道系统当前状态和期望状态后,如何将系统从当前状态调整到期望状态是个问题,在此我们可以用PID进行调整,PID分为位置式和增量式,位置式适合舵机等系统,在此使用的是增量式。 公式:PID=P*e(n)+I*[(e(n)+e(n-1)+…+e(0
基于STM32与FreeRTOS的四轴机械臂项目
目录 一、项目介绍 二、前期准备 1.硬件准备 2.开发环境 3.CubeMX配置 三、裸机各种模块测试 1.舵机模块 2.蓝牙模块 3.按键摇杆传感器模块和旋钮电位器模块 4.OLED模块 5.W25Q128模块 四、裸机三种控制测试 1.摇杆控制 2.示教器控制 3.蓝牙控制 五、裸机与FreeRTOS 1.CubeMX配置 2.移植裸机三种控制代码
图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下)
摘自:https://mp.weixin.qq.com/s/1vXfYPgaQEkXLfpSnjJqAw 图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下) CJKK 苍穹四轴DIY 2019-11-15 第八步 失控保护设置 PIX 的失控保护是通过 故障保护 菜单配置的,点击 初始设置->必要硬件->故障保护,如下所示: 首先明确飞控有几

2017.04.19 特种机器人-载人四轴飞行器亿航184介绍
拿了VC的5200万美金后,中国工科男造出了让世界震惊的"飞行汽车"! 北京时间2016年1月7日3:00(美国西部时间2016年1月6日11:00),中国智能无人机公司亿航,于拉斯维加斯2016 CES国际消费类电子产品展览会上,全球首发全电力低空自动驾驶载人飞行器——"亿航184"! 第一次实现了人类的全自动驾驶飞行 亿航184意寓:1位乘客,8支螺旋桨,4支机臂。这是继GHOS


我的四轴专用PID参数整定方法及原理---超长文慎入
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情。 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么‘只’使用PID的四轴会在飞行中震荡,告诉大家为什么光使用PID并不能实现对四轴姿态‘足够好’的控制。文章中还是涉及了不少自控原理和其他控制相关的姿势,没有一点底子的话确实会看着

Crazyflie微型四轴 深入解读2
一.微处理器部分 处理的核心,可以看到四个MOTOR驱动控制腿,状态指示灯, 21 22腿的IIC接口,与IMU模块通讯, 2 3 4 11 12等引脚的对电源管理模块的控制,主要功能就是检测电压,控制通/断等, 25到31对2.4G无线模块的通讯与控制 14到17引脚作为预留外设接口 44脚为引导程序地址的的硬件设置, 总之,都是数字电
Pixhawk无人机扩展教程(2)---树莓派安装ubuntu-mate系统及必要设置(苍穹四轴)
摘自:https://mp.weixin.qq.com/s/GekdU6_kTDcfvTBq9jVJFQ Pixhawk无人机扩展教程(2)---树莓派安装ubuntu-mate系统及必要设置 原创 CJKK 苍穹四轴DIY 1月5日 上一节教程介绍了树莓派的安装和接线,教程链接: Pixhawk无人机扩展教程(1)---树莓派与pixhawk连接
实践动手学习 | 基于STM32的四轴飞行器
关注、星标公众号,不错过精彩内容 整理:黄工 素材来源:小马哥 学习嵌入式开发的软件,或者硬件工程师,动手实践非常重要,理论 + 实践才会达到事半功倍的效果。 今天就给大家推荐由西安小马哥带来的DragonFlyV2开源四轴飞行器,同时文末有福利:赠送四轴飞行器 + 配套教程。 如果你能亲自学习完本文说的『基于STM32的四轴飞行器』项目,我觉得你已经比一些工作1年,甚至2、3年的工程师都厉害

基于ESP32的小型四轴无人机
粗糙版试飞成功! 陀螺仪部分直接飞线飞了一个模块,懒得焊了。不是很水平,稳定性不是很好。因为滤波算法中加入的元素太少了,目前也就MPU6050的输出数据加入了计算,所以很多自稳定性飞行功能都没有实现。后期研究一下是加磁力计和气压计还是加光流的效果更好一点。 近期会再贴一片出来试试。

(一)四轴——PPM信号与接收
现在四轴炙手可热。由于之前对航模比较感兴趣,因此自然而然对四轴也比较感兴趣。我对四轴了解不多,因此这一系列博客将是个循序渐进的过程。 博客将包括:对四轴原理的理解+算法的研究+对MWC算法的解读与修改。 (MWC程序解读以MultiWii_1_8版本为主,因为版本越高,外设越多,代码越多。我们先只看核心代码。) 关于PPM信号可参考: http://www.geek-worksho
三菱 FX5U PLC 4轴程序 控制松下伺服3个, 四轴自动堆垛码垛设备程序
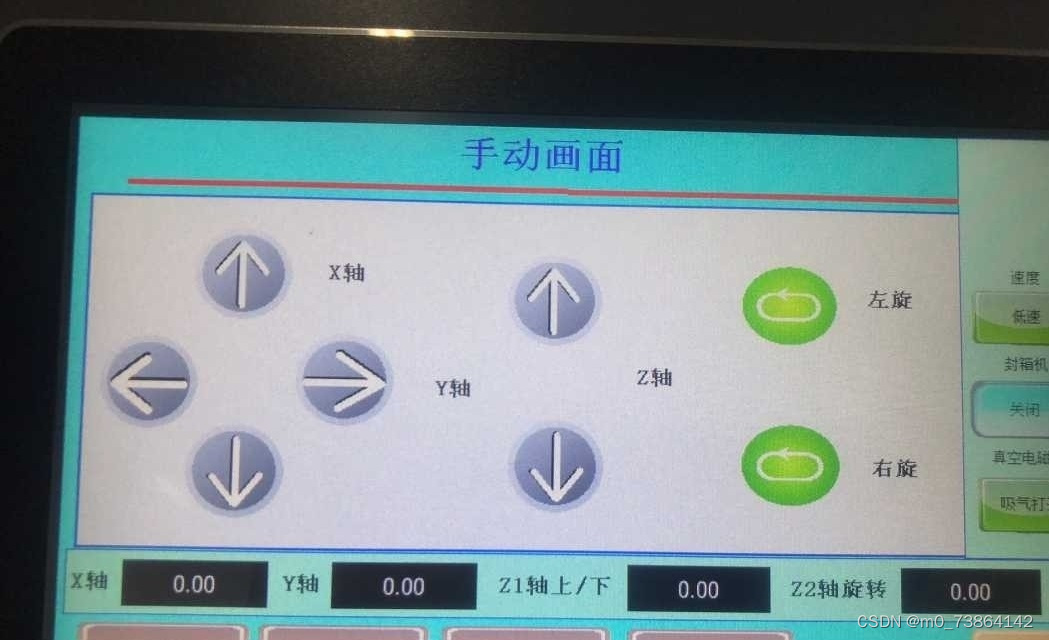
三菱 FX5U PLC 4轴程序。 控制松下伺服3个, 步进电机一个, 四轴自动堆垛码垛设备程序, 回原点动作用专用的原点回归指令写的, 手动运行用三菱相对定位指令写的 , 自动运行用绝对定位指令写的取料运行, 表格定位写的自动放料运行, 设备各种报警异常都有写出 程序每一步都有注释。 联系包括PLC程序、显控触摸屏 程序、松下伺服驱动器接线图。 YID:8315668336564482工控教

四轴飞行器飞行原理与双闭环PID控制
四轴飞行器 是微型飞行器的其中一种,相对于固定翼飞行器,它的方向控制灵活、抗干扰能力强、飞行稳定,能够携带一定的负载和有悬停功能,因此能够很好地进行空中拍摄、监视、侦查等功能,在军事和民用上具备广泛的运用前景。 四轴飞行器关键技术在于控制策略。由于智能控制算法在运行复杂的浮点型运算以及矩阵运算时,微处理器计算能力受限,难以达到飞行控制实时性的要求;而PID控制简单,易于实现,且技术成熟