可见光专题

真空玻璃可见光透射比检测 玻璃制品检测 玻璃器皿检测
建筑玻璃检测 防火玻璃、钢化玻璃、夹层玻璃、均质钢化玻璃、平板玻璃、中空玻璃、真空玻璃、镀膜玻璃夹丝玻璃、光栅玻璃、压花玻璃、建筑用U形玻璃、镶嵌玻璃、玻璃幕墙等 工业玻璃检测 钢化安全玻璃、电加温玻璃、玻璃、半钢化玻璃、视镜玻璃、汽车安全玻璃、汽车后窗电热玻璃、隔热涂膜玻璃、太阳电池用玻璃等 特种玻璃检测 耐高压玻璃、耐高温高压玻璃、耐高温玻璃、壁炉玻璃、波峰焊玻璃、烤箱玻璃、耐温
【12580无线通信技术】第十章 可见光无线通信技术期末复习自考复习
第十章 可见光无线通信技术 P263(选择/填空)VLC在利用LED照明的同时,将信号调制在LED光源上,以可见光波段作为载体传输数据。P263(填空)可见光通信技术可分为室内可见光通信和室外可见光通信两大类。P263(填空)白光LED具有响应时间短、高速调制的特性,因此可以设计出基于白光LED的室内可见光无线通信系统和网络(也称“白光通信”)P263(名词)白光通信技术:是指利用LED器件高速

红外和可见光图像融合算法研究
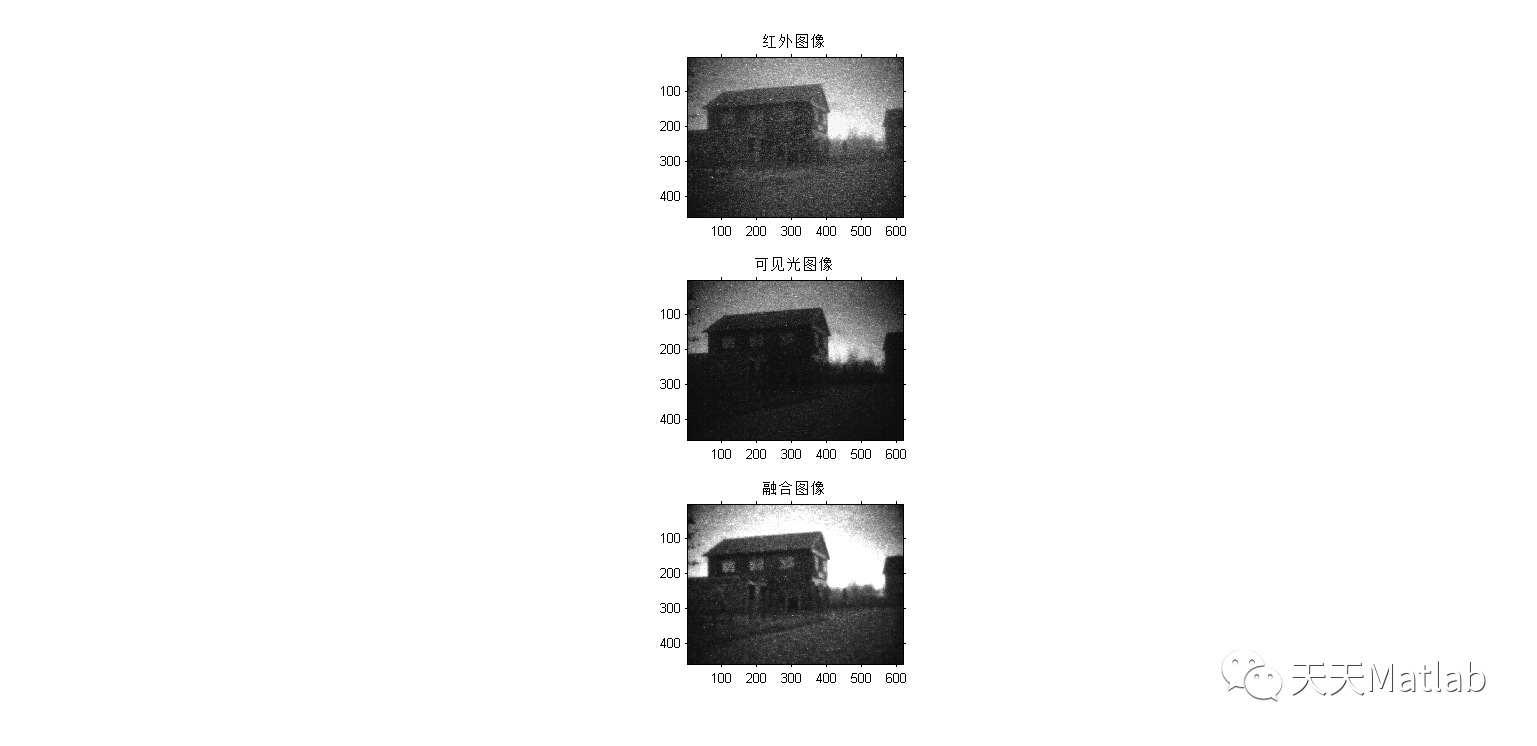
基于MATLAB的红外和可见光图像融合系统[带评价指标] 一、课题介绍 红外技术作为人类认识自然、探索自然的一种新的现代工具,已经被各国普遍的应用于生物、医学、地学等科学领域以及军事侦察方面。红外图像直接反映了物体表面温度分布情况,但由于目标的红外辐射十分复杂,而且影响目标红外辐射的因素很多,红外热图像的清晰度远不如可视图像。可见光图像能够很好的描绘场景中各个物体的外形结构,具有较好的轮廓表
RTK负载(4K可见光+高分热成像+超广角+激光测距)四光AI智能识别跟踪吊舱技术详解
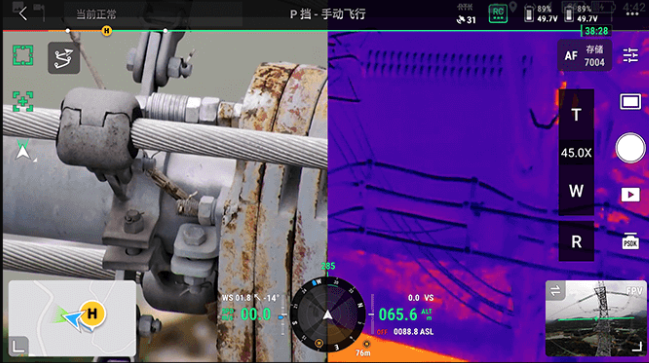
无人机+光电吊舱的RTK负载(4K可见光+高分热成像+超广角+激光测距)AI智能识别跟踪吊舱技术是一种高度集成和先进的无人机观测系统。系统结合了无人机的飞行能力和光电吊舱的多功能传感器,通过集成RTK(实时动态差分定位)技术、4K可见光摄像头、高分热成像仪、超广角镜头和激光测距仪,以及AI智能识别跟踪算法,实现了对地面目标的精准观测、识别、跟踪和测量。 以下是该技术的主要特点和功能详解:

【图像融合】基于matlab GUI小波变换可见光与红外光图像融合(带面板)【含Matlab源码 701期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

基于Volterra级数的DFE判决反馈均衡器可见光通信系统误码率matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 判决反馈均衡器(Decision Feedback Equalizer, DFE)原理 在可见光通信系统中的应用 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 ........................

图像处理: 可见光波长(wavelength)与RGB之间的转换
关于颜色转换,有时间看标准当然最好,不过我手头一时没有相关标准,所以参考了一些网上的资料, 380nm 到 760nm的可见光 对应的RGB大概是这个样子的, C语言版本程序, //指定波长转换成RGBA颜色std::vector<int> lambdaToColor(double lambda,double gamma = 0.8,double intensityMax = 255.

【图像融合学习笔记002】图像融合论文及代码网址整理总结(2)——红外与可见光图像融合
写在前面的话: 本篇博文主要整理汇总一下现有的红外与可见光图像融合算法(文章和代码)。适当地,也会整理出作者的学术主页。整理这些的初衷,是为了方便自己,顺便也给同领域的研究者在找代码等方面提供些许便利。另外,该领域的文章很多,本篇博文也只是整理了其中的一部分,并且,本人不会对论文内容做过多评论。 【2019】 1、文章:FusionGAN:A generative adversarial ne

Infrared and visible image fusion using total variation model(采用全变差模型的红外与可见光图像的融合)
由于研究需要,在非专业学习的基础上对《Infrared and visible image fusion using total variation model》进行了翻译,有翻译不对之处,还望指教! 原文地址:http://download.csdn.net/detail/smilehehe110/9750199 (也可自己下载) 采用全变差模型的红外与可见光图像的融合 摘

红外与可见光图像融合论文阅读(一)
最近研究红外与可见光图像融合,看到一篇文章RFN-Nest: An end-to-end residual fusion network for infrared and visible images,这里记录一下。 Abstract 本文提出一种残差融合网络residual fusion network (RFN),用于替换传统的融合方法,同时提出两种损失函数用于训练RFN:细节保留损失函数
【图像融合】基于对比度增强结合多尺度边缘保持分解红外与可见光图像融合含Matlab源码
1 简介 图像融合是将来自不同传感器的图像进行整合,以获取更丰富更有用的信息, 提高对场景描述的完整性和准确性。和任意单一源图像相比,融合图像能为人类视觉系统或其他应用提供更为全面的信息。图像融合属于信息融合的分支,其研究始于上世纪八十年代,并在近几十年中有突飞猛进的发展,这一方面是因为前端传感器技术的进步使得图像数据量激增,人们面对海量数据以及复杂的应用程序急需图像融合处理来获得关于特定场景

【图像配准】Canny边缘检测+模板配准红外可见光双路数据
研究目的 最近在做无人机遥感红外和可见光双路数据配准,由于红外相机视野范围较小,因此配准的目的主要是在可见光的视野范围内,裁剪出红外图像对应的部分,同时,保持可见光的高分辨率不变。 本文思路 本文尝试使用Canny边缘检测提取红外和可见光的边缘特征,然后使用模板匹配的方式去进行配准。由于红外图像和可见光图像的分辨率并不相同,因此需要对可见光不断进行下采样,以接近红外图像的分辨率。 总体看来
VLC可见光通信:2、高速LED驱动电路
背景 在VLC可见光通信中,需要高速的控制LED的通断,因此需要高速LED驱动电路。 文中出现的低压是指24V电压以下,中压是指24V~60V电压,高压是指60V ~ 160V。 低速是指500KHZ以下,高速是指2MHZ。 小功率是指20W以下,大功率指20W~100W。 低压小功率LED低速&高速:20W、5 ~ 24V、 0 ~ 3A 此范围内属于小功率的LED,如手电筒灯头等。这种电