古月专题

古月·ROS2入门21讲——学习笔记(二)常用工具部分15-21讲
上篇:古月·ROS2入门21讲——学习笔记(一)核心概念部分1-14讲-CSDN博客 目录 第十五讲:Launch:多节点启动与配置脚本 1. Launch文件 2. 多节点启动 运行效果 文件解析 3. 命令行参数配置 运行效果 文件解析 4. 资源重映射 运行效果 文件解析 5. ROS参数设置 运行效果 文件解析 加载参数文件 Launch文件包含 文
古月·ROS2入门21讲——学习笔记
第一讲:ROS/ROS2是什么 1. ROS的诞生 对于越来越复杂的智能机器人系统,已经不是一个人或者一个团队可以独立完成的,如何高效开发机器人,是技术层面上非常重要的一个问题,针对这个问题,一群斯坦福大学的有志青年尝试给出一个答案,那就是机器人操作系统。 我们可以看到PR2机器人已经可以完成叠毛巾、熨烫衣服、打台球、剪头发等一系列复杂的应用功能,以叠毛巾为例,这在当时是轰动机器人

古月居 PyTorch入门:一起从零搭建神经网络二、PyTorch基础知识
PyTorch入门:一起从零搭建神经网络二、PyTorch基础知识 1、神经网络结构 一个经典的神经网络结构包含了三个层,分别是输入层、输出层、中间层(隐藏层)。设计一个神经网络时,输入输出层的节点数往往是固定的,而中间层可以自由指定。输入数据经过一层或者多层的隐藏层训练得出训练结果输出。 2、激活函数作用 什么是激活函数: 所谓激活函数,就是在人工神经网络的神经元上运行的函数,负责将神

古月居 PyTorch入门:一起从零搭建神经网络一、PyTorch环境搭建
1、什么是神经网络: 人工神经网络是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。当前神经网络已经能够在图像处理等领域占据大半江山,包括自动驾驶、语音识别、人脸识别等等。神经网络能够通过庞大的数据集输入经过合理的网络搭建给用户输出一个数据集的分类。本系列的课程是神经网络的基础教学,能够带大家学习了解搭建神经网络以及使用神经网络进行静物分类识别的一个过程。 当前在深度学习领域
ROS自学--古月居P16
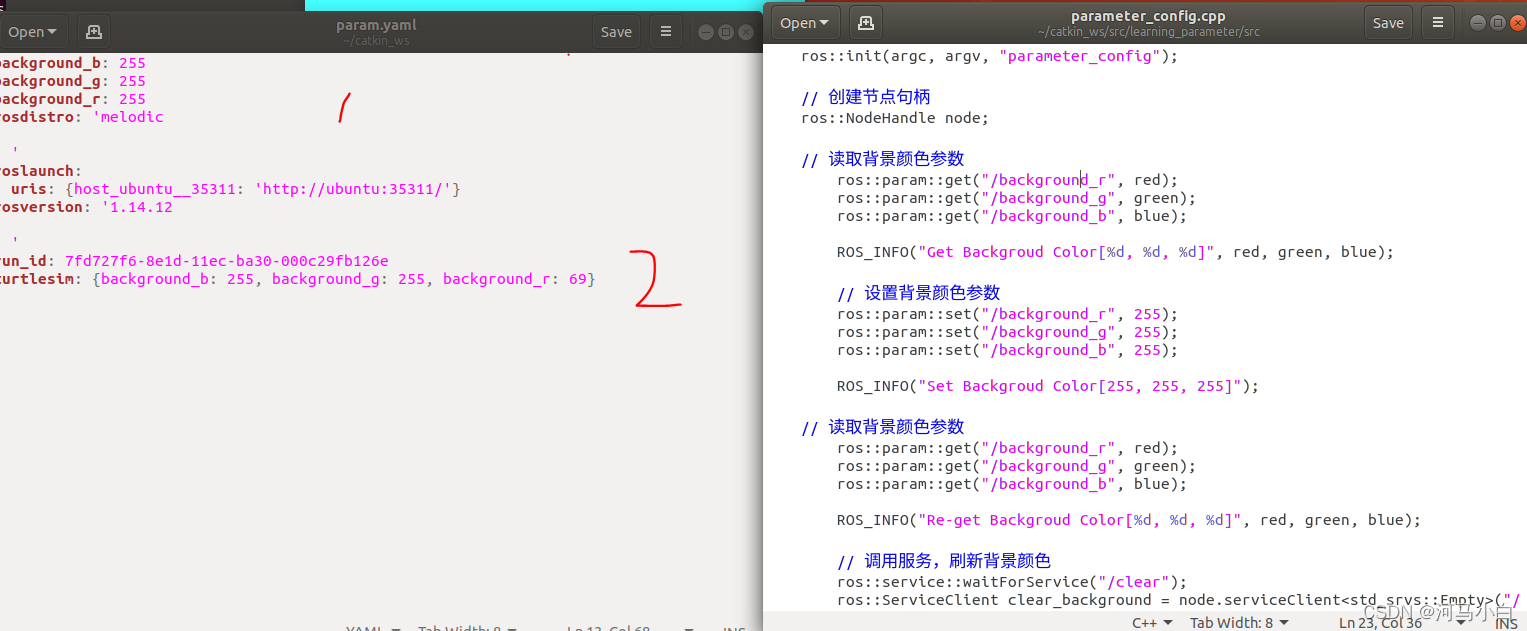
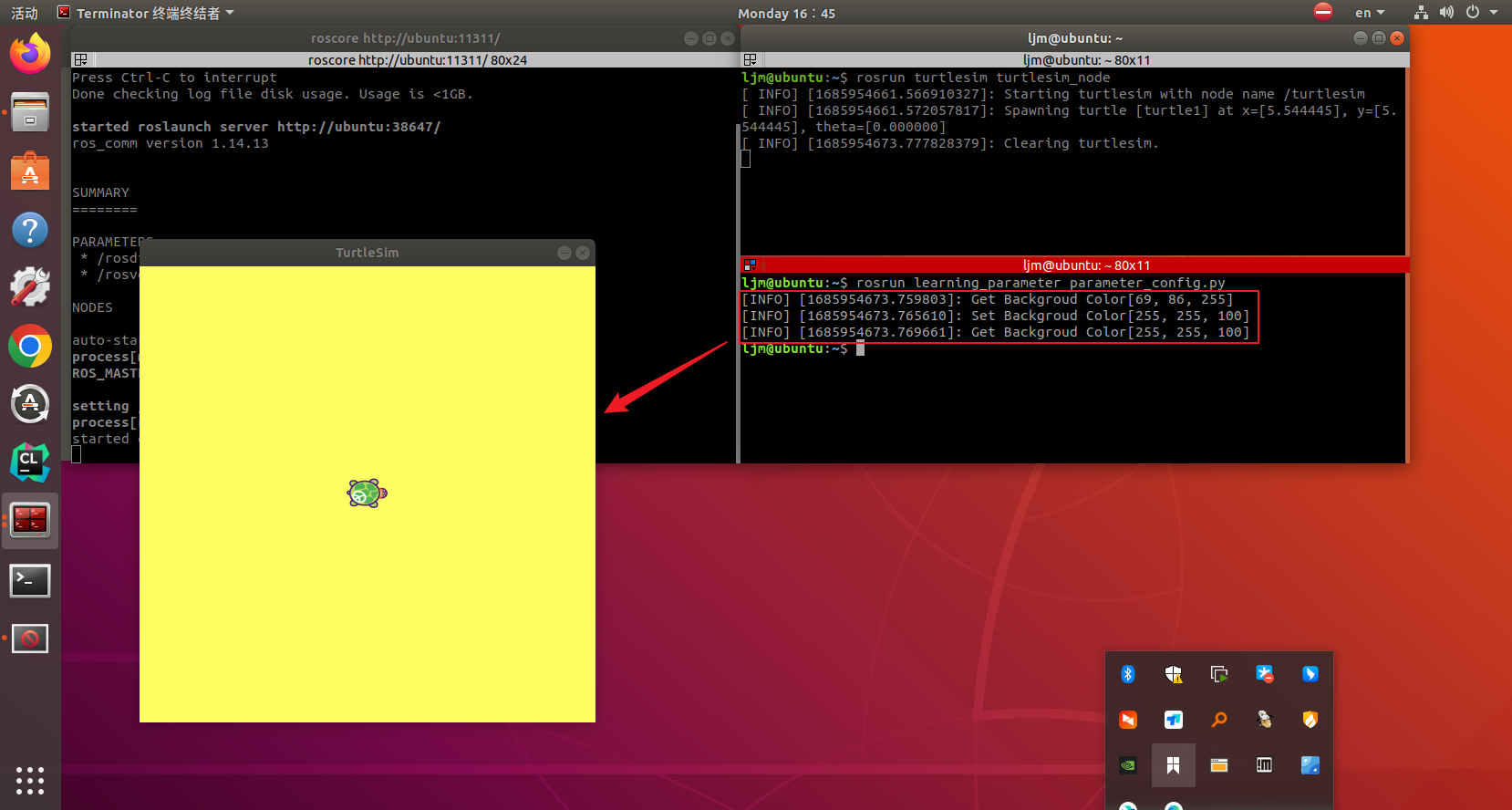
1.用参数文件去更改 rosparam dump param.yaml 生成参数文件保存到当前目录 在param.yaml手动更改rgb值,再rosparam load param.yaml 使用参数 rosservice call /clear “{}” 刷新显示 2.用set更改rgb值,dump之后,yaml文件里面自动更改数值 load再clear刷新之后,更改了颜色 3.问题??这怎么有
古月居ros2机器人系列修改图片后如何编译问题
B(大佬):看的古月居吧?把路径修改,hcx改成你的设备名称,然后在终端colcon build,然后ros2 run......,就不会报错了应该 A: 请问这个重新编译需要删除以前的文件吗,因为如果我没记错build里是编译后的文件(可能我记错了,因为即使我手动修改了build的文件依然是报错的状态,很大可能是我这样做并没有完成我需要的重新编译) B:需要

古月居ros入门21讲——第八讲ROS命令行工具的使用
1.运行如下代码片(分别在三个命令行中输入) roscore //启动 master节点rosrun turtlesim turtlesim_node //创建一个海龟节点rosrun turtlesim turtle_teleop_key //创建对海龟的控制节点 此时就可以在运行rosrun turtlesim turtle_teleop_key的控制台用键盘的 ↑ ↓ ← →来控制
博客转载--古月金真
转自:https://blog.csdn.net/bolu1234/article/details/51867099 前言 对于喜欢逛CSDN的人来说,看别人的博客确实能够对自己有不小的提高,有时候看到特别好的博客想转载下载,但是不能一个字一个字的敲了,这时候我们就想快速转载别人的博客,把别人的博客移到自己的空间里面,当然有人会说我们可以收藏博客啊,就不需要转载,(⊙o⊙)… 也对。

B站上有古月的ROS入门21讲
http://shequ.dimianzhan.com/articles/693 B站上有古月的ROS入门21讲,根据我之前的学其他的学习经验看视频效果应该是不错的。

PX4+激光雷达在gazebo中仿真实现(古月居)
摘自:https://www.guyuehome.com/8983 基于px4的无人机自主导航 1187 1 2020年6月30日 12时12分 Judez 基于px4的无人机自主导航 在ros的学习过程中我们经常可以看到自主导航的小车,那么无人机是否也能像小车一样建图导航呢?本文即主要介绍如何在px4平台基础上进行无人机自主导航仿真实验。 ROS导航框架介绍 无人机导
【古月居《ros入门21讲》学习笔记】05_ROS是什么及其核心概念
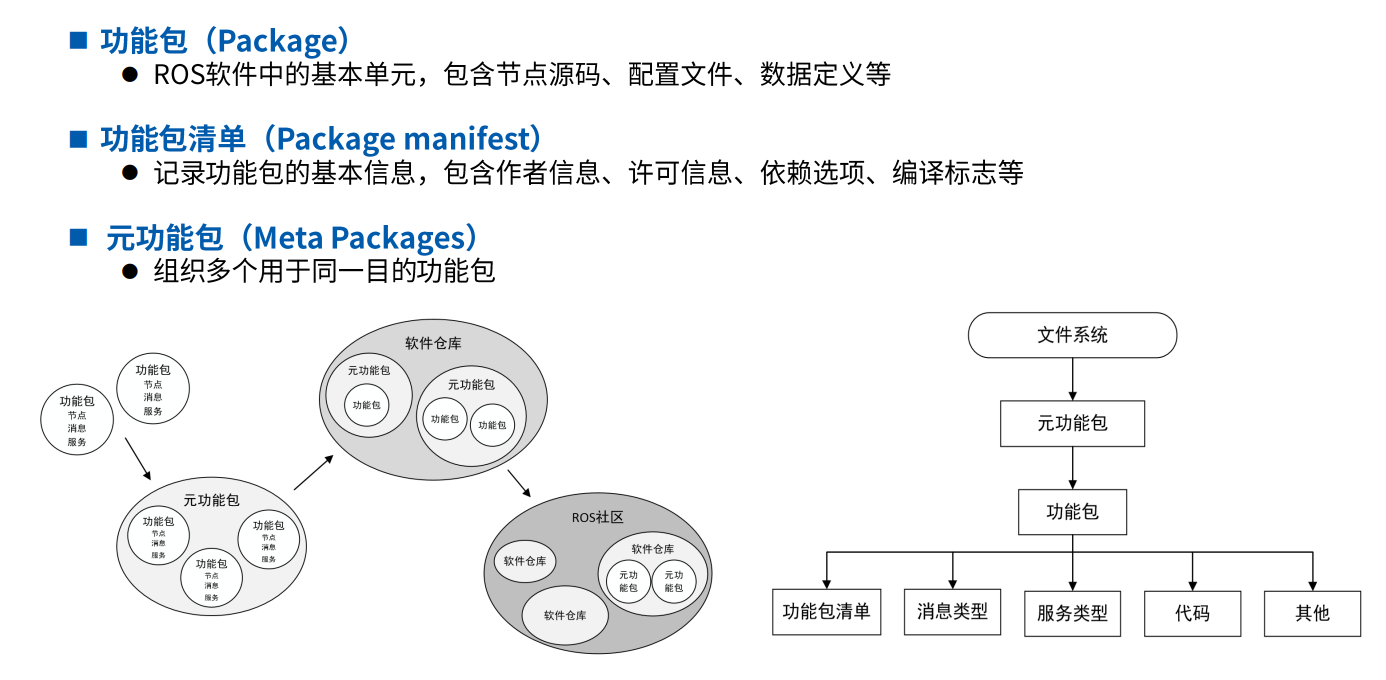
目录 说明 1. ROS发展史 ROS版本演变 2. ROS是什么 ROS中的通信机制 ROS中的开发工具 ROS中的应用功能 ROS中的生态系统 3. ROS核心概念 节点与节点管理器 通信方式1:话题 通信方式2:服务 话题与服务的区别 参数 文件系统 说明 1. 本系列学习笔记基于B站:古月居 《ROS入门21讲》课程; 2. 本节是整个笔
【古月居《ros入门21讲》学习笔记】10_话题消息的定义与使用
目录 说明: 1. 话题模型 2. 实现过程(C++) 自定义话题消息 Person.msg文件内容 Person.msg文件内容说明 编译配置 在package.xml文件中添加功能包依赖 在CMakeLists.txt中添加编译选项 编译生成语言相关文件 创建发布者代码(C++) 创建订阅者代码(C++) 配置代码编译规则 配置内容说明 编译并运行 编译
【古月居《ros入门21讲》学习笔记】14_参数的使用与编程方法
目录 说明: 1. 参数模型(全局字典) 2. 实现过程(C++) 创建功能包 参数命令行的使用 YAML参数文件 rosparam命令 使用示例 编程方法(C++) 配置代码编译规则 编译并运行 编译 运行 3. 实现过程(Python) 编程方法(Python) 运行效果 说明: 1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的

古月居 ROS 21 讲7
古月居 ROS 21 讲 7服务端Server的编程实现 /*** 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger*///三个头文件,ROS、发布速度指令、服务数据类型#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <std_srvs/Trigger.h>ros:

古月居 ROS 21 讲4
古月居 ROS 21 讲 5、订阅者Subscriber的编程实现 程序实现 /*** 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose*///ROS头文件和消息类型头文件#include <ros/ros.h>#include "turtlesim/Pose.h"// 接收到订阅的消息后,会进入消息回调函数void poseCallback(co

古月居 ROS 21 讲2
古月居 ROS 21 讲 2、创建工作空间与功能包 cd ~/catkin_ws/ 可输入pwd查看路径 catkin_ws$ catkin_make install产生安装空间(手动输入) 注: src中放入功能包的源码; install是安装空间编译生成的可执行文件都会放入其中,发布给客户使用的集成文件; devel是开发过程中生成的可执行文件都会放入其中; build中的文件基本用

古月居 ROS 21 讲3
古月居 ROS 21 讲 3 发布者Publisher的编程实现 1)功能包的创建: $ cd ~/catkin_ws/src $ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim 2)创建发布者代码(cpp) 如何实现一个发布者: • 初始化ROS节点; • 向ROS Master

古月居教程之:moveit碰撞检测添加模型
在学习古月的《ROS机器人开发实践》机械臂的10.5.4碰撞检测的时候,发现添加模型的面板和书本上的不同: 书上是点import file,但是这里只有import,我尝试过点import但是会报错,模型加载不出来。 琢磨一番后发现这个面板比书上的功能更全: 他不仅可以加模型,还可以加一些规则的形状: 1.box是正方体盒子,sphere是球体,cylinder是圆柱,cone是圆锥 2.m

ROS入门21讲笔记——古月居
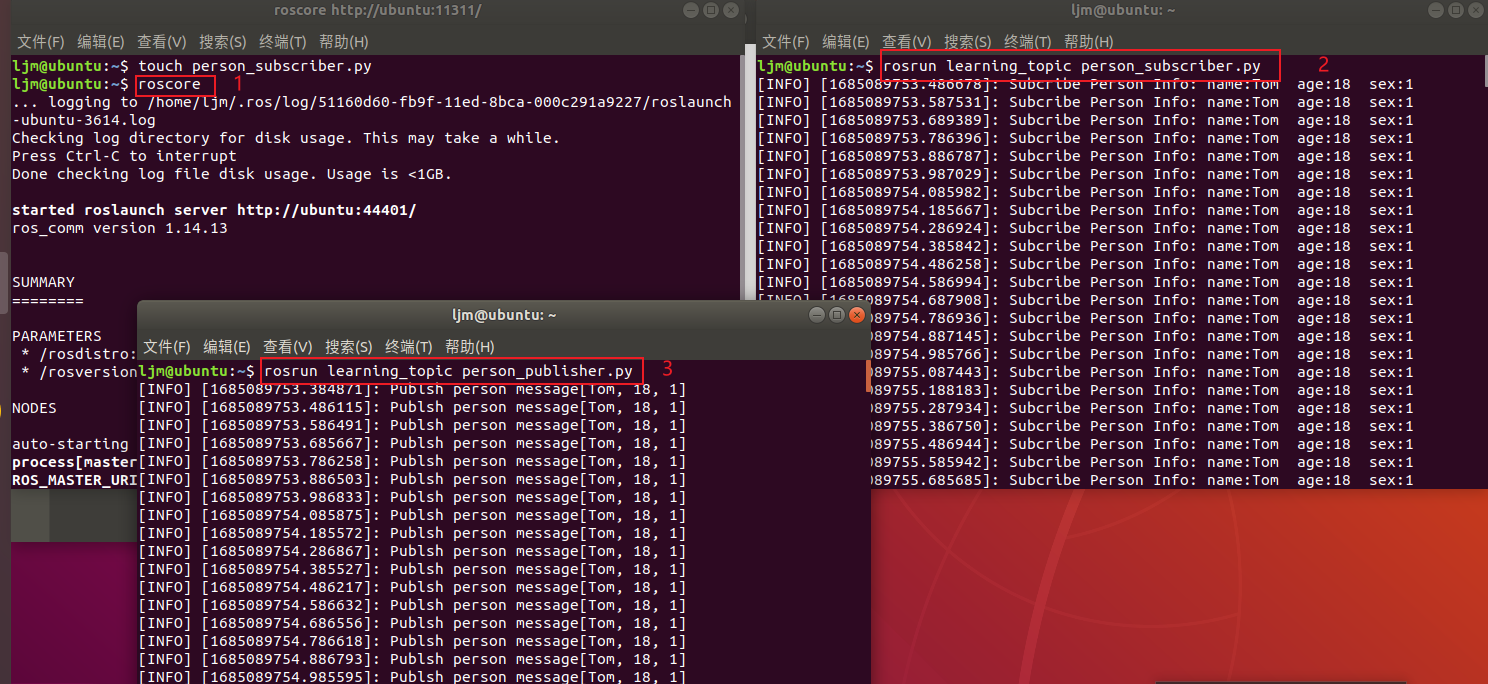
提示: 1、 在 catkin_ws 文件下运行catkin_make 2、 在 catkin_ws 文件下运行source devel/setup.bash 3、 在 catkin_ws 文件下运行rosrun learning_topic pose_subscriber 4、 基本上所有操作都是在自己创建的话题文件夹下进行操作 5、 海归仿真器启动可以在任意文件夹下启动 启动流程: 1、 ro