从点专题

从点云到网格(三)Poisson重建
Possion重建是Kazhdan等2006年提出的网格重建方法[1]。Possion重建的输入是点云及其法向量,输出是三维网格。Poisson有公开的源代码[2]。PCL中也有Poisson的实现。 核心思想 Possion重建是一个非常直观的方法。它的核心思想是点云代表了物体表面的位置,其法向量代表了内外的方向。通过隐式地拟合一个由物体派生的指示函数,可以给出一个平滑的物体表面的估计。

从点云到网格(二)VRIP介绍
VRIP(Volumetric Range Image Processing),顾名思义,是从深度图重建网格的一种方法。VRIP是Brian Curless和Marc Levoy在1996年提出来的方法,距今已经有20年的历史了,依然属于最好的方法之一。 VRIP的核心问题是 已知世界坐标系下,某物体表面ff在不同视角下的深度图f1^,...,fK^f1^,...,fK^,求ff。这里隐含深

从点云到网格(一)综述
在计算机图形学中,网格是一种非常基本的表示方法。随着近些年三维表面重建和Dense SLAM的兴起,从海量的三维点云数据生成单一的网格的方法得到了大量的应用。特别是在AR中,因为交互的需要,网格生成算法经常是一个必选项。 由于工作中正好涉及到一些这方面的应用,因此想简单介绍一下这方面的知识。以下仅讨论三维情形。 本文很多内容来源于Matthew Bolitho的博士论文1。这位仁兄现在在NVidi

【PCL】(十五)从点云创建距离图像
(十五)从点云创建距离图像 以下代码实现从生成的点云数据创建距离图像。 range_image_creation.cpp #include <pcl/range_image/range_image.h>int main () {pcl::PointCloud<pcl::PointXYZ> pointCloud;//生成点云数据for (float y=-0.5f; y<=0.5f; y+=
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集
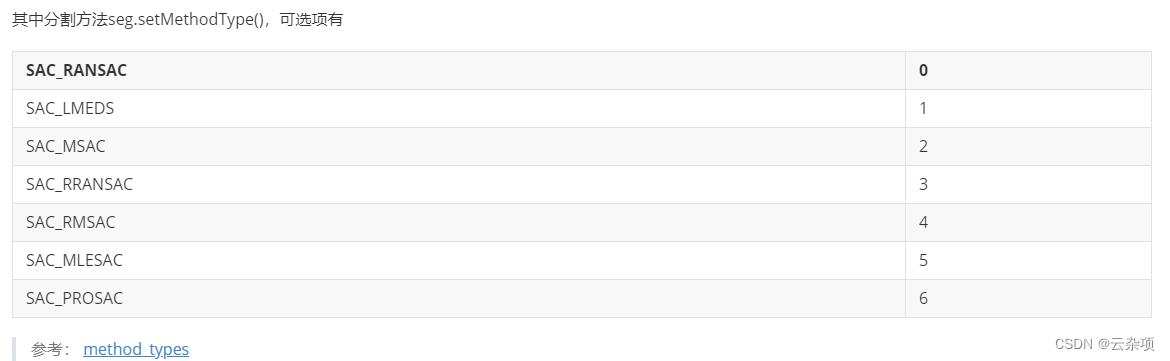
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集 一、算法原理二、代码三、结果1.`sor`统计滤波2.`Ransac`内点分割平面3.`Ransac`外点分割平面 四、相关数据 一、算法原理 1、Ransac介绍 RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学

Open3D 从点云构建八叉树(13)
Open3D 从点云构建八叉树(13) 一、什么是八叉树二、构建方法三、实际作用四、算法实现1.代码2.可视化显示 一、什么是八叉树 八叉树(Octree) 是什么: 八叉树(Octree)是一种树形数据结构,通常用于对三维空间进行分割和组织。它将空间递归地划分为立方体的8个子块,每个子块可以进一步划分为8个子块,以此类推。这样的划分方式使得八叉树能够高效地表示空间中的对象及其
如何从点云创建距离图像(How to create a range image from a point cloud)
本教程演示如何从点云和给定传感器位置创建距离图像。该代码创建了漂浮在观察者前方的矩形示例点云。 #代码 首先,在你最喜欢的编辑器中创建一个叫做range_image_creation.cpp的文件,并在其中放置下面的代码: #include <pcl/range_image/range_image.h>int main (int argc, char** argv) {pcl::PointCl