人形专题

【笔记-流程记录】从零开始做一个人形怪兽(建模阶段)
大型 1.第一步还是找素模,打开材质球,吸管点一下,就会出现素模的贴图,一共有四个 比如,点进去第一个,再点漫反射,再点psd就会得到相应的贴图 2.然后我们依然是面片然后插入参考图 如果透视窗口啥都没有,按g也不显示线框。那按下z(居中视图),然后再试一下按G显示栅格。 3.导入素模,重置变换 注释:重置变换是一个非常有用的功能,主要用于将对象的变换属性(位置、旋

旗晟智能助推浙大海创人形机器人创新中心发展!
8月27日上午,余杭区成功举办机器人产业高质量发展大会。会上,由地方政府与浙江大学共同建设的人形机器人产业创新中心成立并揭牌。该中心目标明确,致力于打造机器人领域国内、国际的高等级创新高地。浙江大学校领导、院士专家、机器人企业代表、投资机构代表等齐聚于此,共同见证机器人产业发展的新机遇与新蓝图。 浙江大学党委副书记、机器人研究院院长朱世强教授做了专题报告,指出了人形机器人产业创新中心的发展思路,

搜维尔科技:Manus VR高精度手部动作捕捉数据手套为人形机器人、人工智能和人机交互赋能
Manus Quantum数据手套能够提供实时端到端的手部动作数据流与高精度数据集,助力人形机器人实现快速发展。 Quantum量子数据手套采用毫米级精度的磁性指尖跟踪传感器,融入尖端的EMF磁性定位追踪技术,无漂移,能提供高度准确且可靠的手指动作捕捉数据,为人形机器人、人工智能和机器学习赋能。 Manus是一家专注于开发高精度创新型人机交互设备的高科技公司,致力于手指跟踪技术的研究与开发,旨


日本人形机器人仿真环境搭建
机器人 官网在这里 http://ai2001.ifdef.jp/uvc/uvc.html 我们可以下载他们的源码 ODE引擎安装 这个是刚体动力学模拟引擎,我用的是windows,大家可以自己参考着官网来(http://ode.org/wiki/index.php/Manual#Install_and_Use)安装: 1、先从连接中下载源码: https://bitbucket.org

中国的人形机器人都有哪些出色的产品?
8月21日,2024世界机器人大会在北京亦庄正式开幕。本次大会共有169家企业集中展出了600余件机器人创新产品,人形机器人占比最大,大会还开设人形机器人专区,共亮相27款整机。 展会中多数人形机器人产品都偏向服务型,主要聚焦场景应用和高精度、灵活度的设计,比如采摘机器人、清洁机器人、工厂机械臂分拣、焊接,手术协作机器人、物流仓储等等。 现场热度更高的当属优必选等知名人形机器人企业的产品,

华为重磅官宣:超9亿台、5000个头部应用已加入鸿蒙生态!人形机器人现身 专注AI芯片!英伟达挑战者Cerebras要上市了
内容提要 华为表示,盘古大模型5.0加持,小艺能力全新升级。小艺智能体与导航条融为一体,无处不在,随时召唤。只需将文字、图片、文档“投喂”小艺,即可便捷高效处理文字、识别图像、分析文档。 正文 据华为终端官方微博6月21日消息,华为开发者大会(HDC2024)上,华为官宣,截至目前,鸿蒙生态设备已超过9亿台。 华为称,5000个头部应用已加入鸿蒙生态 满足用户使用时长99.9
HumanPlus——斯坦福ALOHA团队开源的人形机器人:融合影子学习技术、RL、模仿学习
前言 今天只是一个平常的日子,不过看到了两篇文章 一篇是《半年冒出近百家新公司,「具身智能」也有春天》 我看完之后转发到朋友圈,并评论道:让机器人翻一万个后空翻,不如让机器人打好一个螺钉,毕竟在目前阶段 炫酷没有意义,所以我们近期全力为工厂去赋能,解决一个个工业场景 期待我司与更多工厂合作,从前期的验证、评估开始另外一篇文章便是之前斯坦福Moblie aloha团队竟然开源推出了他们的人形机器

OPenCV实现把人形轮廓画在实时视频画面中
操作系统:ubuntu22.04OpenCV版本:OpenCV4.9IDE:Visual Studio Code编程语言:C++11 1.功能描述 当你从摄像头读取实时视频时,如果想在视频的画面中画一个方框,或者是画一个圆,是很简单的事情,可是当我在一张图上画了一个人形站立的轮廓,要求你把这个轮廓显示在实时的视频画面中,你该怎么做呢?简单的说,第一步:把第一张图的轮廓找出来,保存好,第二部,打
![[文献解读]:斯坦福最新研究-HumanPlus:人形机器人跟踪和模仿人类](https://img-blog.csdnimg.cn/direct/093a22624d4f4a8696121cc793ed8987.jpeg#pic_center)
[文献解读]:斯坦福最新研究-HumanPlus:人形机器人跟踪和模仿人类
摘要 制造具有与人类相似外形的机器人的关键论点之一是,我们可以利用大量人类数据进行训练。然而,由于人形机器人感知和控制的复杂性、人形机器人与人类在形态和驱动方面仍然存在的物理差距,以及人形机器人缺乏从自我中心视觉学习自主技能的数据管道,因此在实践中这样做仍然具有挑战性。 在本文中,我们介绍了一个全栈系统,供人形机器人从人类数据中学习运动和自主技能。我们首先使用现有的40小时人体运动数据集通过

人形机器人的应用场景
随着技术的不断进步和人工智能的快速发展,人形机器人逐渐走入人们的视野,并在各个领域中展现出广泛的应用潜力。本文将探讨人形机器人的主要应用场景,包括服务行业助手、教育领域应用、医疗保健助手、工业制造伙伴、家庭服务助手、军事领域执行、娱乐领域参与以及情感陪伴角色等方面。 人形机器人的应用场景 1. 服务行业助手 人形机器人在服务行业具有巨大的应用潜力。在餐厅、酒店等场所,人形机器人可以担任服务员
人形机器人建模与控制(二) - 高级运动学和动态建模
L2: Advanced Kinematic and Dynamic Modeling 这里写目录标题 L2: Advanced Kinematic and Dynamic Modeling1. Introduction2. Kinematic Modeling运动学方程速度的雅可比矩阵雅可比矩阵的两种形式分析雅可比矩阵(Analytical Jacobian)几何雅可比矩阵(Geomet
人形机器人的组成原理、相关技术和行业应用
人形机器人的部件和工作原理 人形机器人的部件通常包括机身、关节、传感器、驱动器、控制器等。其工作原理是通过传感器收集环境信息,控制器根据预设的算法和程序生成动作指令,驱动器驱动关节运动,从而实现机器人的各种动作。 人形机器人主要由以下几个部件组成: 伺服电机:在自动控制系统中,伺服电机作为执行元件,将接收到的电信号转换为电动机轴上的角位移或角速度输出。在人形机器人中,伺服电机是驱动各个关节运动的

波士顿动力发布全新人形机器人:Atlas
4月16日,波士顿动力(Boston Dynamics)发布了《再见,液压Atlas》视频,正式宣告其研发的液压驱动双足人形机器人Atlas退役。 在视频的结尾,Atlas深深鞠躬,之后还有一句话“直到我们再次相遇,Atlas”。 再次相遇并没有等太久,在波士顿动力宣布液压Atlas机器人退役不到24个小时,其全新研发的全电动Atlas机器人便亮相了。 新的电动Atlas机器人在设计上与以往

普通人如何零基础进入AIGC大模型人形机器人赛道,自学攻略,应用转化项目案例
要进入人形机器人赛道,普通人需要了解和掌握一系列的技能和知识,包括机器人设计、编程、电子工程、机械工程以及团队合作和项目管理。以下是一个详细的指南,帮助你从零基础开始,逐步进入这个充满挑战和机遇的领域。 基础教育和技能培养 进入人形机器人领域,基础教育和技能培养是至关重要的第一步。这个阶段主要涉及学习基础科学知识和掌握专业技能,为之后的深入学习和实践打下坚实的基础。 数学和物理是理解和设
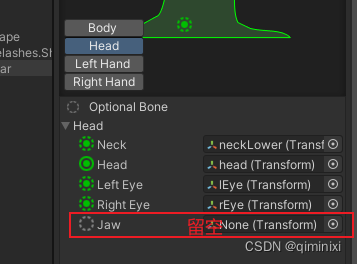
Unity 人形骨骼动画模型嘴巴张开
最近搞Daz3D玩,导入后挂上动画模型嘴巴张开,其丑无比。 Google了一下,得知原因是Unity没有对下巴那根骨骼做控制,动画系统就会把它放到默认的位置,嘴巴就张开了。找到了3种解决办法。 1.移除动画中对下巴这个骨骼的转向设置,有位大佬搞了个工具一键处理,忘记在哪儿了。最好是美术出的动画就没有控制下巴,这样用代码搞好了,重新导入一次动画就又恢复了(不排除我操作不对的可能)。 2.Ava

能看会说的人形机器人,对话的样子吓到我了
ChatGPT狂飙160天,世界已经不是之前的样子。 新建了免费的人工智能中文站https://ai.weoknow.com 新建了收费的人工智能中文站https://ai.hzytsoft.cn/ 更多资源欢迎关注 还记得这个表情宛如真人的人形机器人吗? ta被取名Ameca,由一家名为「Engineered Arts」的英国公司制造。最近,这个机器人又迎来

NVIDIA 发布 Project GR00T 人形机器人基础模型和 Isaac 机器人平台重大更新
系列文章目录 前言 Isaac 机器人平台现可为开发者提供全新的机器人训练仿真器、Jetson Thor 机器人计算机、生成式 AI 基础模型和由 CUDA 加速的感知和操作库。 Project GR00T 是一种多模态人形机器人通用基础模型,作为机器人的大脑,使它们能够学习技能来解决各种任务。 美国加利福尼亚州圣何塞 —— GTC —— 太平洋时间 202
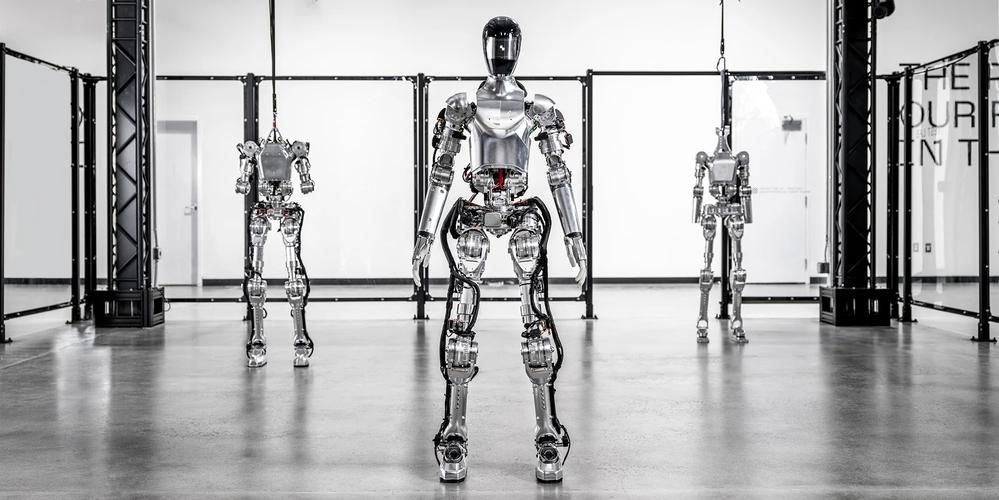
Figure 公司推出首款集成 OpenAI 大模型的自主人形机器人,开启与人类全面对话的新纪元
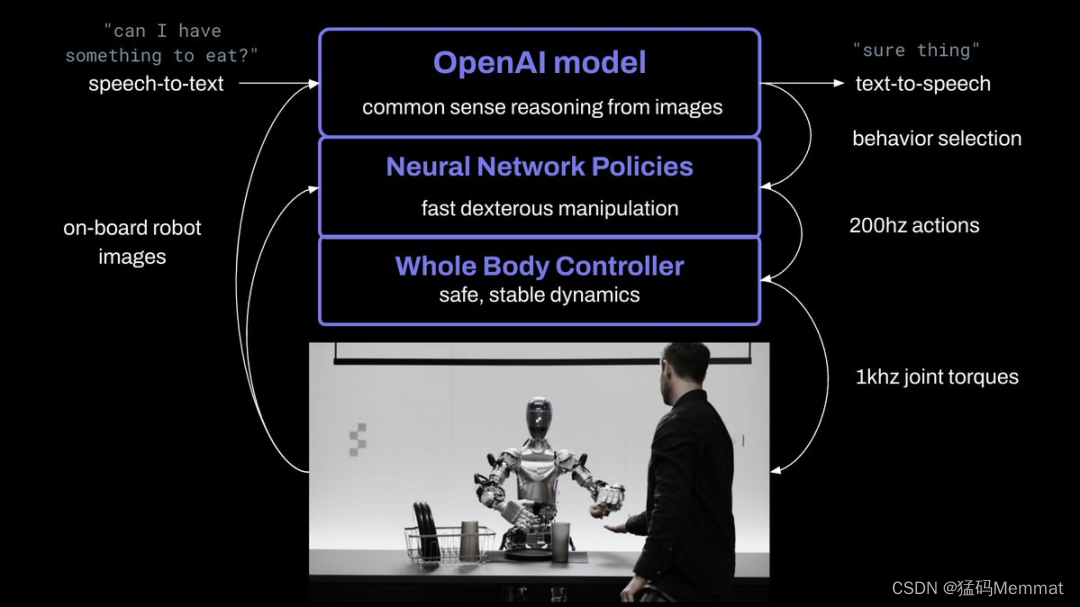
2024年3月13日,Figure,一家在人工智能机器人领域引领创新的公司,宣布推出了一款革命性的自主人形机器人。这款全新的 demo 机器人不仅标志着商业上可行的自主人形机器人技术的突破,更是通过整合 OpenAI 的先进大模型技术,实现了与人类的全面对话,开启了人机交互的新纪元。 Figure 的这款机器人是世界上首个专为实现复杂人机对话而设计的商业人形机器人。它能够理解并

Figure 公司的Figure 01人形机器人
文章目录 Figure 公司管理层成员 人工智能驱动的积极未来路线图使命公司现在可能性解决方案我们该怎么做结论 Figure 公司 Figure 公司是一家人工智能科技公司,总部位于美国旧金山。该公司专注于开发人形机器人和相关技术,旨在为用户提供与人工智能交互的全新体验。 Figure 公司的旗舰产品是名为“Figure 01”的人形机器人。这款机器人采用了先进的机器学习和
人形机器人进展:IEEE Robotics出版双臂通用协同机械手操作架构
文章目录 1. Main2. My ThoughtsReference彩蛋a. OpenAI 投资: 人形机器人公司 Figure AIb. 人工智能软件工程师 Devin 上线 1. Main 图1 人居环境下的人形双臂机器人系统 通用人形机器人 作为近年来机器人与AI交叉领域的研究热点和技术竞争高地,因其具备在 非结构化人居环境 中承担各种琐碎家务的潜力而得到广
Humanoid-Gym 开源人形机器人端到端强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布!
系列文章目录 前言 Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer GitHub Repository: GitHub - roboterax/humanoid-gym: Humanoid-Gym: Reinforcement Learning for H
SanctuaryAI推出Phoenix: 专为工作而设计的人形通用机器人
文章目录 1. Company2. Main2.1 关于凤凰™ (Phoenix)2.2 关于碳™(Carbon)2.3 商业化部署2.4 关于 Sanctuary Corporation 3. My thoughtsReference彩蛋:将手机变为桌面小机器人 唯一入选《时代》杂志 2023 年最佳发明的通用机器人。 称机器人自主做家务的速度和灵活度已达到了和人类相当的水平。

当AGI遇到人形机器人
为什么人类对人形机器人抱有执念 人形机器人是一种模仿人类外形和行为的机器人,它的研究和开发有着多方面的目的和意义。 人形机器人可以更好地适应人类的环境和工具。人类的生活和工作空间都是根据人的尺寸和动作来设计的,例如门、楼梯、桌椅、开关等。如果机器人能够像人一样行走、爬行、操作,就可以更方便地完成一些人类的任务,而不需要改变环境或工具。人形机器人可以更好地与人类交流和合作。人类的语言、表情、

2024人形机器人产业链白皮书
人形机器人是一种具有与人类相似外形和运动能力的机器人。它集机械、电子、控制、计算机、人工智能等多学科技术于一体,是机器人技术发展的高级阶段。 历史发展 人形机器人的发展可以追溯到20世纪60年代。当时,美国科学家约瑟夫·恩格尔伯格提出了“机器人三定律”,为人形机器人的发展奠定了理论基础。 20世纪70年代,日本早稻田大学研制出世界上第一台人形机器人WABOT-1。这台机器人身高1.8米,重8
揭秘人形机器人的精密构造与市场机会
人形机器人作为科技领域的新蓝海,蕴含着巨大的市场机会。其复杂的构造和不断演进的发展路径,构筑了一个庞大而精密的产业生态。在国家政策的引导下,这一领域更是迎来了前所未有的关注与支持。 ▶ 从构造来看,人形机器人分为3大部分6个子系统,3大部分是机械部分、传感部分和控制部分;6个子系统是驱动系统、机械结构系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。减速器、伺服电机、控制