本文主要是介绍揭秘人形机器人的精密构造与市场机会,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
人形机器人作为科技领域的新蓝海,蕴含着巨大的市场机会。其复杂的构造和不断演进的发展路径,构筑了一个庞大而精密的产业生态。在国家政策的引导下,这一领域更是迎来了前所未有的关注与支持。
▶ 从构造来看,人形机器人分为3大部分6个子系统,3大部分是机械部分、传感部分和控制部分;6个子系统是驱动系统、机械结构系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统。减速器、伺服电机、控制器是人形机器人三大核心零部件,这三大核心零部件占人形机器人成本超过70%。
▶ 从发展历程来看,人形机器人起源于1973年,经历了电机械阶段、实验室智能阶段、应用推广阶段和小批量应用阶段。自2020年起,人形机器人的发展进程明显加速,得到了特斯拉、波士顿动力、小米、优必选、OpenAI、华为等商业巨头的积极布局。
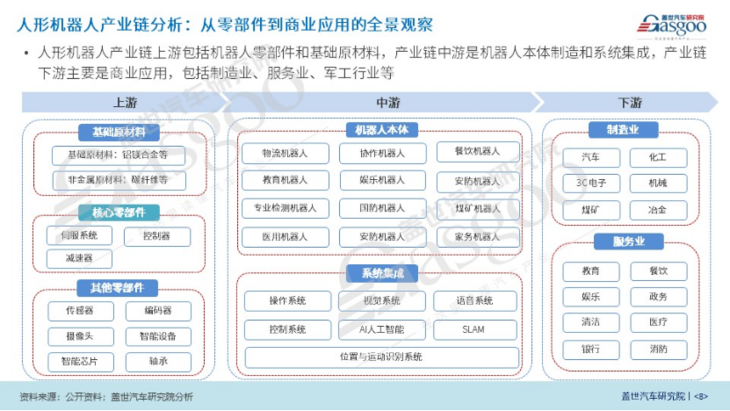
▶ 在产业链方面,人形机器人产业链上游包括机器人核心零部件和基础原材料,中游涵盖机器人本体制造和系统集成,而下游则主要涉及制造业、服务业、军工行业等商业应用。
▶ 国家政策方面,人形机器人在国家层面受到高度重视,政府多次发布专项政策。特别是在2023年11月,工信部发布了《人形机器人创新发展指导意见》,明确了人形机器人在多领域应用中的发展方向。
▶ 市场规模方面,人形机器人市场预计在2030年将超过3500亿元。从竞争格局来看,英国 Engineered Arts 处于领导者地位,而美国特斯拉、1X technologies 处于强表现者地位,我国的智元机器人、优必选以及美国Agility Robotics 公司均处于竞争者地位。
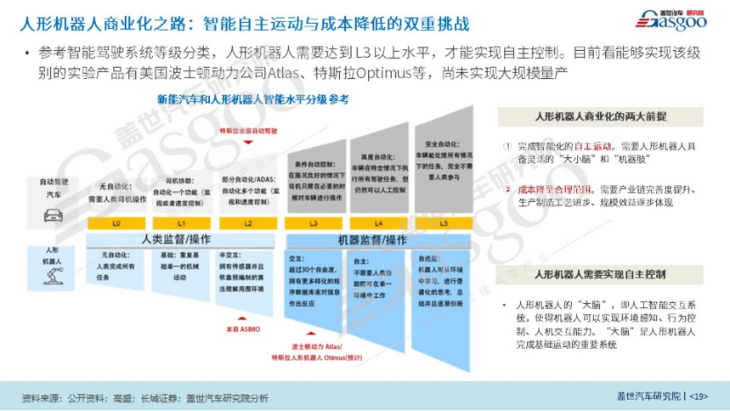
▶ 从商业化角度来看,人形机器人商业化的两大前提是:完成智能化的自主运动、成本降至合理范围。前者需要人形机器人具备灵活的“大小脑”和“机器肢”,后者需要产业链完善度提升、生产制造工艺进步、规模效益逐步体现。
▶ 从应用场景来看,随着技术迭代,人形机器人应用场景分为三个阶段,第一阶段达到“替代重复性劳动”的应用标准,第二阶段人形机器人开始走向制造业各类工厂以及商业服务业的更多场景,第三阶段具身智能成为现实。
▶未来展望方面,人形机器人应用将受到AI大模型不断升级的推动,预计未来两年内将实现量产,初步商业化场景将主要集中在工业、展览等领域,这一发展趋势将为人形机器人带来更广泛的应用前景。
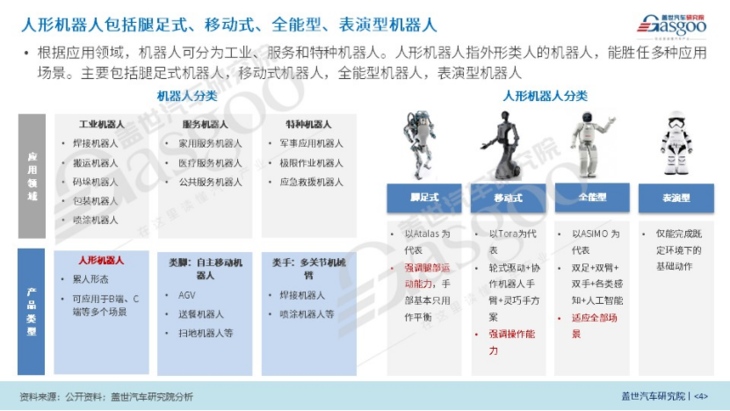
人形机器人指外形类人的机器人,能胜任多种应用场景。主要包括腿足式机器人,移动式机器人,全能型机器人,表演型机器人。腿足式以波士顿动力Atalas为代表,强调腿部运动能力;移动式以Tora为代表,强调操作能力;全能型以本田ASIMO为代表,适应多种场景。
从结构组成上看,人形机器人主要包括机械、传感和控制三大关键部分,涵盖6个重要子系统,包括驱动系统机械结构、感知、机器人-环境交互、人机交互以及控制系统。减速器、伺服电机、控制器等核心要素构成了其坚固的构造框架。
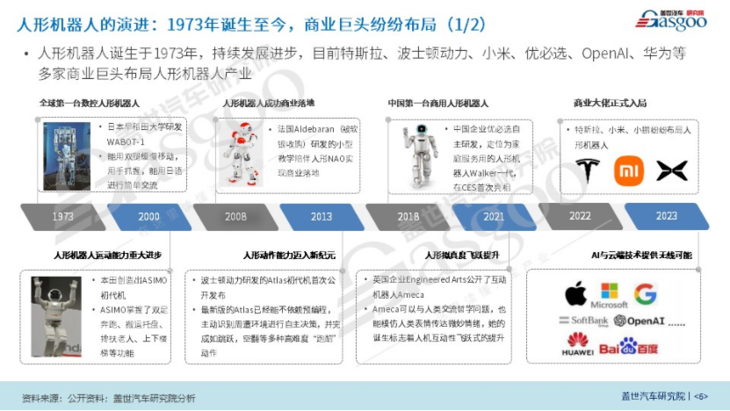
1973年见证了人形机器人的诞生,从那时起,人形机器人经历了持续的发展和不断的进步。如今,特斯拉、波士顿动力、小米、优必选、OpenAI、华为等商业巨头已纷纷加入人形机器人产业的布局。
人形机器人的发展可以划分为四个关键阶段,包括电机械阶段、实验室智能阶段、应用推广阶段,以及近年来的小批量应用阶段。特别是在2020年之后,人形机器人的发展呈现出明显的加速趋势
人形机器人产业链的上游包括机器人零部件和基础原材料。中游涵盖机器人本体制造和系统集成。而产业链的下游主要涉及商业应用领域,包括制造业、服务业、军工行业等。其中核心零部件包括伺服系统、控制器、减速器。
伺服系统是运动控制核心部件。伺服系统由驱动器+电机+编码器组成。目前高端市场被欧美日系占据,国内厂商汇川技术、禾川科技等产品质量和技术水平不断提升,已逐渐在国内市场中取得一定份额。2022年伺服系统国产品牌合计占比近36%。减速器是关节传动的必要零部件,精密减速器主要有谐波减速器、RV 减速器和精密行星减速器。谐波减速器是轻负载的人形机器人更为理想的零部件,行星减速器适用于人形机器人的关节部位
预计到2030年,人形机器人市场将达到超过3500亿元。在竞争格局中,英国的Engineered Arts、美国的特斯拉、1X Technologies等公司表现强劲,中国的智元机器人和优必选也在竞争中崭露头角。
商业化方面,人形机器人实现商业化关键在于实现智能自主运动和将成本降低至合理水平。前者需要机器人具备灵活的“大小脑”和“机器肢”,后者则要求产业链完善、工艺不断进步和规模效益逐步显现。
随着人工智能大模型不断升级,人形机器人的应用得以全面推动。这一发展趋势不仅提高了机器人的智能水平,还增强了其学习和适应能力。AI大模型的升级使人形机器人具备更为精准的认知和智能决策能力,使其在面对复杂环境和任务时表现更为灵活。这种技术升级为人形机器人带来了更广泛的应用前景,预示着未来将在各个领域发挥更为出色的性能,满足不断增长的社会需求
当前,人形机器人领域吸引了多方参与,国内机器人创业公司以优必选和达闼为代表。在2023年,傅利叶智能、宇树科技、追觅科技、智元机器人等公司也纷纷推出了通用型人形机器人产品。除此之外,互联网企业、科技公司、以及造车企业也将目光聚焦在机器人市场。
特斯拉通过巧妙地复用汽车产业链、结合高性价比的国产供应链以及规模效应的实施,有望将人形机器人的成本降至2-3万美元。这一战略举措有望引领行业商业化发展,为人形机器人领域带来新的商业模式和市场标杆。
更多内容欢迎访问:盖世大学堂
这篇关于揭秘人形机器人的精密构造与市场机会的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!