主站专题

Modbus通信主站和从站点区别的理解
定义 在Modbus协议中,主站和从站的角色分工非常明确: 主站(Master):主站是通信的发起者,它控制着整个通信过程。它发送请求并等待从站的响应。主站可以是PLC、计算机或其他控制器。它根据需要发起读写操作,并负责处理从站返回的数据。 从站(Slave):从站响应主站的请求,它的行为由主站的指令决定。每个从站都有一个唯一的地址,以便主站能准确地定位到它。当从站接收到主站的请求时,它会
EtherCAT主站IgH解析(二)-- 如何将Igh移植到Linux/Windows/RTOS等多操作系统
版权声明:本文为本文为博主原创文章,转载请注明出处 https://www.cnblogs.com/wsg1100 如有错误,欢迎指正。 本文简单介绍如何将 igh 移植到 zephyr、freertos、rtems、rtthread等RTOS ,甚至 windows 上。 ##前言 目前,EtherCAT商用主站有:Acontis、TwinCAT3、KPA、Codesys等,开源EtherCA
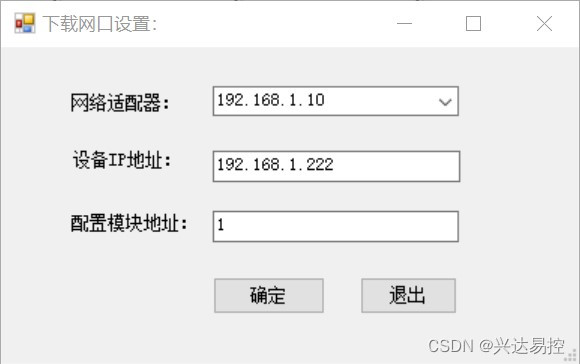
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO
EtherCAT主站SOEM -- 31 -- STM32F767-SOEM从站IO模块采集DI及输出DO 0 QT-SOEM及STM32F767-SOEM视频欣赏及源代码链接:0.1 QT-SOEM博客、视频欣赏及源代码链接0.2 STM32F767-SOEM 博客、视频欣赏及源代码链接 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcon

EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 29 -- STM32F767-SOEM通过 CSP模式(周期同步位置模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1

EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 28 -- STM32F767-SOEM通过 CSV模式(周期同步速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 27 -- STM32F767-SOEM通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 motrorcontrol.h1.4 motrorcontrol.cpp1.5 ma
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 25 -- STM32F767-SOEM通过 PV模式(速度模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载0.3 STM32F7-SOEM视频预览0.4 STM32F7-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 allvalue.c1.3 m
EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 20 --Qt-Soem通过 PT模式(力矩模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 PS 特别注意1 程序文件修改替换1.1 allvalue.h1.2 motrorcontrol.h1.3 mainwindow.cpp1.4 motrorcontrol.cpp 2
EtherCAT主站SOEM -- 19 --Qt-Soem通过CSP模式(周期同步位置模式)控制一个电机转圈圈
EtherCAT主站SOEM -- 19 --Qt-Soem通过CSP模式(周期同步位置模式)控制一个电机转圈圈 0 QT-SOEM视频预览及源代码下载:0.1 QT-SOEM视频预览0.2 QT-SOEM源代码下载 1 程序文件修改替换1.1 allvalue.h1.2 motrorcontrol.h1.3 mainwindow.cpp1.4 motrorcontrol.cpp 2 ui界

Profinet转CANopen主站网关与堡盟编码器通讯案例
Profinet转CANopen主站网关(XD-COPNm20)为CPU与堡盟编码器的通讯提供了CANopen协议向Profinet协议转换互通的桥梁。CANopen是一种基于CAN总线的通讯协议,它被广泛应用于工业自动化领域,而Profinet是一种以太网协议,其优点是高速传输和广泛的可扩展性。通过将CANopen主站转换为Profinet网关,可以实现两种协议之间的无缝集成,从而提供更加灵活可
CANopen转Profinet网关实现原理与CANopen主站配置方法
CANopen转Profinet网关(XD-COPNm20)具有Profinet从站功能的设备。CANopen是一种通用的工业网络协议,而Profinet是以太网上的一种通信协议,两者在工业自动化领域具有广泛的应用。CANopen转Profinet网关的主要作用是实现CANopen设备与Profinet网络之间的互通,使得不同协议下的设备可以相互通信和协同工作。XD-COPNm20连接到Profi
EtherCAT主站SOEM -- 13 --Qt-Soem通过界面按键控制 EtherCAT IO模块的io输出
EtherCAT主站SOEM -- 13 --Qt-Soem通过界面按键控制 EtherCAT IO模块的io输出 一 mainwindow.c 文件函数:1.1 自定义PDO配置2.2 主站初始化2.3 去motrorcontrol界面 二 motrorcontrol.c 文件三 allvalue.h 文件该文档修改记录:总结 一 mainwindow.c 文件函数: main
主站sinox.org阻塞太厉害,大家用sinox.3322.org访问
最近 www.sinox.org域名阻塞太厉害了,几乎不能访问,现在大家用sinox.3322.org访问 sinox.org只是显示正在建设 一直以来sinox.org只是个摆设,并不是主要域名,就像公司要有个门面。其实这个门面可有可无。 其实文章会重复发布到 csdn博客 http://blog.csdn.net/sinox2010p1 百度贴吧 。因为限制广告,不太完整,比
EtherCAT主站SOEM -- 12 -- EtherCAT从站的实际XML文件分析
EtherCAT主站SOEM -- 12 -- EtherCAT从站的实际XML文件分析 1 XML 文件及示例1.1 EtherCATInfo 示例1.2 Vendor 示例1.3 Descriptions 示例1.3.1 Groups1.3.2 Devices1.3.2.1 Physics1.3.2.2 Type1.3.2.3 Name1.3.2.4 Info1.3.2.5 GroupT
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析 1 EtherCAT 从站信息规范1.1 XML 文件说明1.1.1 XML 数据类型1.1.2 EtherCATInfo1.1.3 Groups1.1.4 Devices1.1.5 Modules1.1.6 Types1.1.6.1 AccessType 的组成1.1.6.2 ArraylnfoType
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析
EtherCAT主站SOEM -- 11 -- EtherCAT从站 XML 文件解析 1 EtherCAT 从站信息规范1.1 XML 文件说明1.1.1 XML 数据类型1.1.2 EtherCATInfo1.1.3 Groups1.1.4 Devices1.1.5 Modules1.1.6 Types1.1.6.1 AccessType 的组成1.1.6.2 ArraylnfoType
【MODBUS】Modbus主站云端服务器和边缘设备部署区别
1. Modbus主站作为云端服务器: 1.1 云端服务器作为主站 在这种部署方式中,云端服务器充当Modbus通信的主站,负责向不同的Modbus从站发起请求,并处理响应。云端服务器通常与其他云服务一起运行,可以在云平台上实现对分布式设备的远程监控和控制。 1.2 优点 集中管理:云端服务器可以集中管理多个边缘设备的通信,提供集中监控和控制的功能。数据分析:云端服
EtherCAT主站SOEM -- 7 -- SOEM之ethercatmain.h/c文件解析
EtherCAT主站SOEM -- 7 -- SOEM之ethercatmain.h/c文件解析 一 ethercatmain.h/c文件功能预览:1.1 ethercatmain里面的结构体1.2 ethercatmain里面的函数 二 ethercatmain.h/c 文件的主要函数的作用:2.1 结构体介绍2.1.1 `ec_adaptert` 结构体:2.1.2 `ec_fmmut`

EtherCAT igh主站控制3个台达asdaa2伺服转圈圈
1.查看ASDA的PDO映射 打开ASDA的Delta_ASDA2-E_rev4-00_XML_TSE_20160620.xml文件 修改main.c的pdo部分 2.使能伺服 设置0x6060和0x60C2 for(int i=0;i<3;i++){ecrt_slave_config_sdo8(sc_asda[i], 0x6060, 0, 8);//设置为csp模式ec
EtherCAT主站SOEM -- 8 -- SOEM之 ec_slave 结构体详细分析
EtherCAT主站SOEM -- 8 -- SOEM之 ec_slave 结构体详细分析 一 ec_slave 结构体功能预览:二 ec_slave结构体成员变量翻译三 ec_slave里成员变量的使用该文档修改记录:总结 ec_slavet 结构体是用于描述EtherCAT网络上从站的详细信息的数据结构。非常重要也是最经常使用的一个结构体,所有才单独拿一篇博客来详细介绍。
SOEM主站开发篇(3):为APP程序添加命令
0 工具准备 1.SOEM-1.4.0源码(官网:http://openethercatsociety.github.io/)2.Linux开发板(本文为正点原子I.MX6U ALPHA开发板)3.交叉编译工具(arm-linux-gnueabihf-gcc)4.cmake(版本不得低于3.9,本文为3.9.2)5.Ubuntu 16.04(用于编译生成Linux开发板的可执行文件)
SOEM主站开发篇(2):添加SOEM主站APP程序
0 工具准备 1.SOEM-1.4.0源码(官网:http://openethercatsociety.github.io/)2.Linux开发板(本文为正点原子I.MX6U ALPHA开发板)3.交叉编译工具(arm-linux-gnueabihf-gcc)4.cmake(版本不得低于3.9,本文为3.9.2)5.Ubuntu 16.04(用于编译生成Linux开发板的可执行文件)
![[工业自动化-9]:西门子S7-15xxx编程 - PLC主站 - 信号量:模拟量](https://img-blog.csdnimg.cn/f383a687d6d34dd49f663e68068fcb9b.png)
[工业自动化-9]:西门子S7-15xxx编程 - PLC主站 - 信号量:模拟量
目录 前言: 一、模拟量模块 1.1 概述 1.2 安装 1.3 模拟量链接线 二、模拟量常见问题 2.1 两线制、四线制(电流) 2.2 模拟量模块的参数 2.3 差分信号与单端信号 三、如何防止电磁干扰 3.1 概述 3.2 工业现场的电磁干扰源来源 3.2.1 概述 3.2.2 电机 3.2.3 大功率设备 3.2.4 电磁信号源 3.3 屏蔽线缆 3.3
![[工业自动化-7]:西门子S7-15xxx编程 - PLC主站 - 电源模块](https://img-blog.csdnimg.cn/5f4dec22a82f40ddb368f8ad4f991689.png)
[工业自动化-7]:西门子S7-15xxx编程 - PLC主站 - 电源模块
目录 前言: 一、主站电源PM VS PS 1.1 主站PM电源模块(PM) 1.2 主站PS电源模块 1.3 PM/PS电源模块区别 1.4 如何选择PM/PS电源 1.5 什么时候必须使用PM模块 1.6 什么时候必须使用PS模块 二、背板总线 三、电源模块的安装 前言: 一、主站电源PM VS PS 1.1 主站PM电源模块(PM) 西门子 P
EtherCAT主站SOEM -- 4 -- SOEM之ethercatprint.h/c文件解析
EtherCAT主站SOEM -- 4 -- SOEM之ethercatprint.h/c文件解析 一 ethercatprint.h/c文件功能预览:二 ethercatprint.h/c 文件的主要函数的作用:2.1.1 `char* ec_sdoerror2string(uint32 sdoerrorcode)`2.1.2 `char* ec_ALstatuscode2string(u
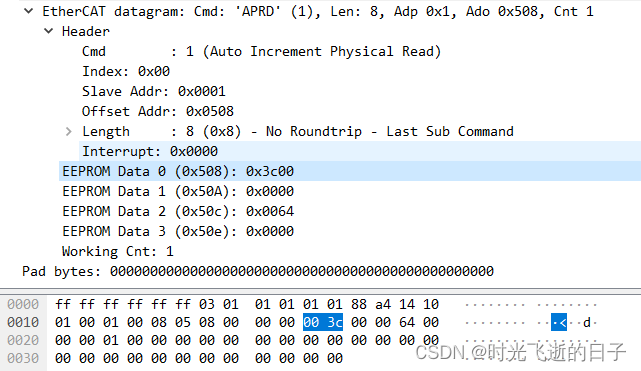
EtherCAT主站读取从站EEPROM抓包分析
0 工具准备 1.EtherCAT主站2.EtherCAT从站(本文使用步进电机驱动器)3.Wireshark 1 抓包分析 1.1 报文总览 本文让主站去读取从站1字地址为0的EEPROM数据内容,主站读取从站EEPROM数据内容使用Wireshark抓包如下: 1.2 EEPROM读取阶段1:将EEPROM访问控制权设置为主站 这一阶段涉及的寄存器包括0x0500、0x0