t265专题

T265录制的rosbag拆包:拆IMU序列和图像序列方法以及如何制作双目euroc、双目tum数据集
目录 1.录制bag包 2.左右目图像的拆解 3.拆IMU数据 4.如何制作eruoc与tum数据集 4.1 eruoc数据集格式 4.2 对齐时间戳 4.3 编写imu.csv文件 4.4 生成索引文件 4.一个脚本完成拆包 1.录制bag包 这里推荐我的同学的博客,大家可以参考这篇博客录制T265的ros包并解决一些问题: 使用 RealSe

SLAM算法与工程实践——相机篇:RealSense T265相机使用(1)
SLAM算法与工程实践系列文章 下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此 SLAM算法与工程实践系列文章链接 下面是专栏地址: SLAM算法与工程实践系列专栏 文章目录 SLAM算法与工程实践系列文章SLAM算法与工程实践系列文章链接SLAM算法与工程实践系列专栏 前言SLAM算法与工程实践——相机篇:RealSense T265相

无人机SLAM双目摄像头的选择,我看了下小觅的双目摄像头,发现现在的双目摄像头已经很完善了(选择用的T265,说了原因)
我看了下小觅的双目摄像头,发现现在的双目摄像头已经很完善了,甚至都不需要你处理双目,都给你处理好了,无人机配上这么一个双目摄像头我感觉我还是很放心的。 开课吧的智能无人机课就是采用的小觅得双目摄像头嘛(现在第二期改用T265了,小觅似乎垮了)。 可见我这篇博文:https://blog.csdn.net/sinat_16643223/article/details/107784885 阿

T265在无人机上的固定我觉得可以通过定制亚克力板来实现
T265在无人机上的固定我觉得可以通过定制亚克力板来实现 T265底下应该是有个孔的,我只需要在无人机的那两根柱子上面固定一个有空的板子可以拧螺丝的应该就OK了,再拿两根扎带把T265绑绑固定一下应该OK了,防止螺丝松了T265也不会掉。 我看T265后面也有两个螺丝孔。 我觉得你无人机固定传感器的扩展板也可以去定制个亚克力板。 后来我看到ZN无人机课程他们固定小觅相机也是自己做的板子。

我在github上搜PX4 T265还真搜到了东西,Auterion 比上次搜说明UAV SLAM要好些
我在github上搜PX4 T265还真搜到了东西,比上次搜说明UAV SLAM要好些,直接搜具体的 我是最开始看到PX4出的那个PX4 vision drone 阿木的介绍说是一个开源视觉无人机,我想开源莫非github上有源码?于是我萌发来github上搜一搜。这次搜我可以直接搜PX4了,因为经过前面这么多了解已经认识到很多人就是用pixhawk PX4来弄无人机SLAM的,而且

T265应该很匹配NUC,因为都是intel的
T265应该很匹配NUC,因为都是INTEL的,你看在这个样例视频里桌子上居然放着个NUC 而且我看智能无人机课程的老师也曾经用过NUC来弄 而且我觉得这样也方便移植,电脑上弄好的东西可以直接移植到NUC上。 T265的SDK似乎好像反而对ARM支持不怎么好。

发现T265的官网有更新,提供了速成视频教程!!!
发现T265的官网有更新,提供了速成视频教程!!! https://www.intelrealsense.com/tracking-camera-t265/ https://www.intelrealsense.com/zh-hans/videos-and-tutorials/

我发觉,不管是弄ROS OPENCV T265二次开发 SDK开发 caffe PX4 都是用的C++
我发觉,不管是弄ROS OPENCV T265二次开发 SDK开发 caffe PX4 都是用的C++ 甚至ACfly都是C++写的 当然ROS tensorflow可能带点Python Dronekit也是python python我可以通过以前的Tensorflow项目重新回顾下,也算是个Python项目。 也就是主要是C++和python 是的,我的

我发现弄摄像头都有SDK,从OZO到T265到小觅都是的
他们都有SDK,而且估计都是C++写的,估计也都是用C++进行二次开发。 这么回看我可能和多款摄像头打交道了。 而且都要弄SDK。 我觉得把一个摄像头玩烂了其他摄像头应该也能比较快上手。 。
T265的二次开发也是用的C++,我估计其他摄像头也是的,SDK也应该是C++写的
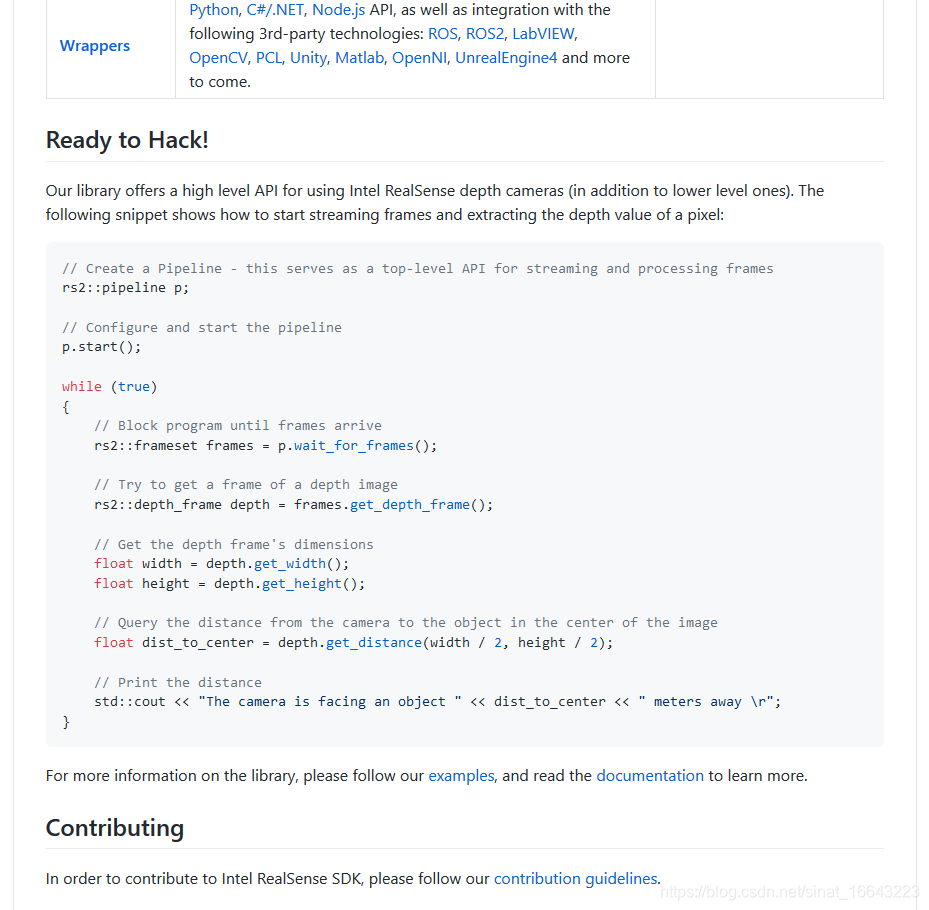
T265的二次开发也是用的C++,我估计其他摄像头也是的 他们的SDK应该也都是C++写的 毕竟也要操控硬件。 https://github.com/IntelRealSense/librealsense

T265在无人机上的固定
我看到他着似乎直接用个3M胶粘在板子上了,或者我可以先买个阿木的T265的架子,再粘一个板子上,这样是否就好些。 现在发现确实可以用3M胶粘住还挺牢的 https://discuss.ardupilot.org/t/integration-of-ardupilot-and-vio-tracking-camera-part-1-getting-started-with-th

T265源码下载及案例实验(这个人运行成功了realsense里的pose例程,获得位置数据!)
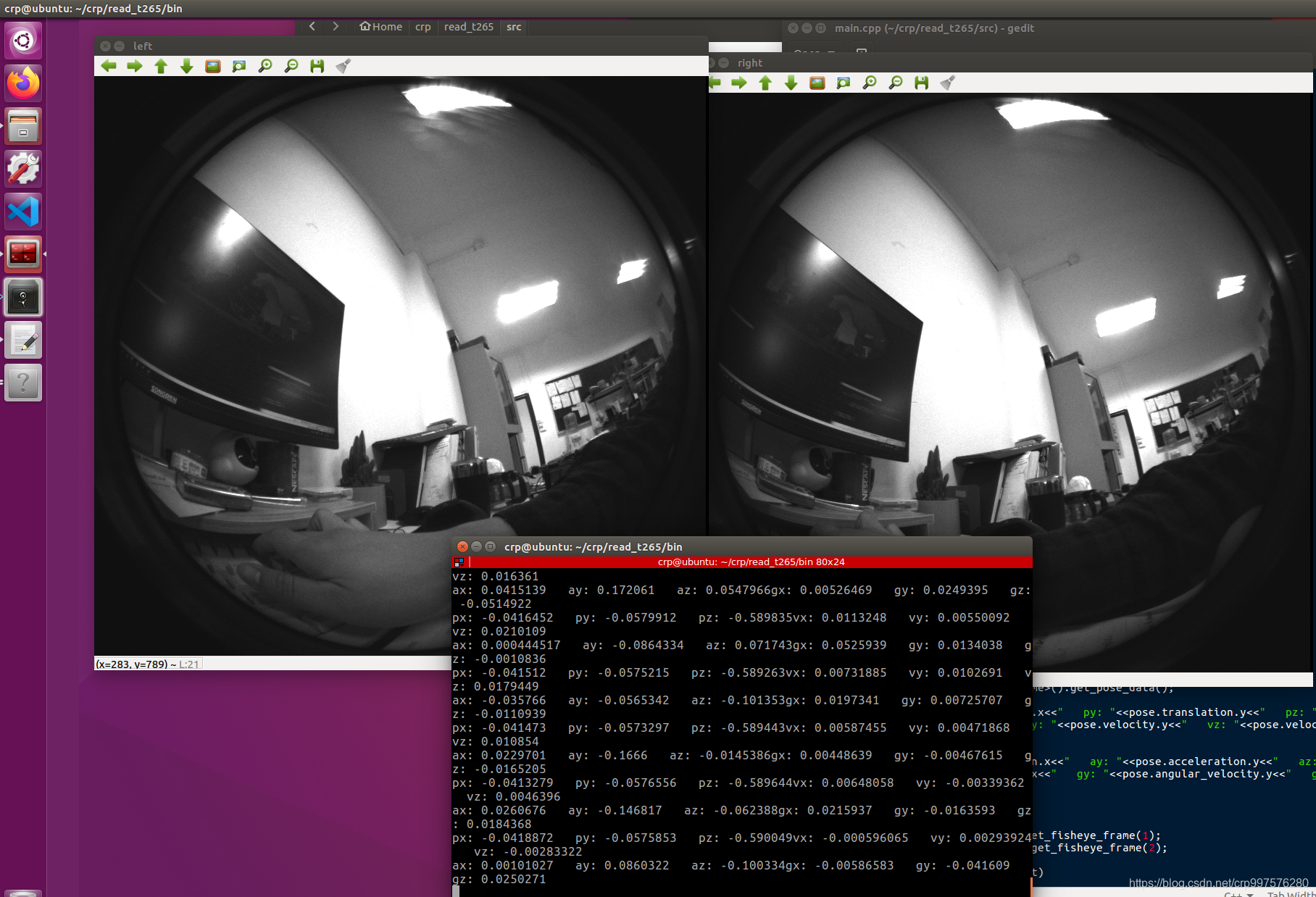
这个人运行成功了realsense里的pose例程,获得位置数据! 摘自:https://blog.csdn.net/qq_44465763/article/details/108617812 T265学习之路(2)---T265源码下载及案例实验 小李子~biu 2020-09-18 11:20:23 22 收藏 分类专栏: T265学习之路 文章标签: linux ubuntu

我准备把ACfly和T265接上
把数据通过串口传给acfly感觉没必要用ROS了,直接用realsense最基本的驱动,调用API直接把数据传给串口,弄个死循环。 树莓派的串口发送程序肯定是有的,直接用ACfly接受就好了。 是的 我先把这个给弄通做出来再说。 t265的驱动应该也可以视为一个文件,我从里面读就可以了是么,讲道理应该是的啊。linux下驱动的编程不就是那样的么。 我确实还是想有一个稳定的实验平台。

我觉得可以初步融合T265和GPS的数据,本身vins fusion融合GPS也是松耦合的方式对吧。
我觉得可以初步融合T265和GPS的数据,本身vins fusion融合GPS也是松耦合的方式对吧。 没必要一味追求高级,关键是效果OK就行。 也可以看看这方面的论文,有没有什么比较好的融合算法。 这个真叫自己写融合算法还真不简单,GPS可能是米级的飘动,T265是厘米级,你说给个固定权重可能也不好,要不用卡尔曼?也就是变化的权重。这里面可真的就讲究了。 T2
Intel Realsense T265使用教程(转载)
这里面很重要一点说了获取T265相机参数的方式,包括 相机的内参和相机与IMU之间的外参。 转载自:https://blog.csdn.net/crp997576280/article/details/109544456 Intel Realsense T265使用教程 熊猫飞天 2021-02-09 14:20:40 收藏 38 分类专栏: SLAM-VIO 文章标签: T265
我发现vins-mono的launch文件里面就有T265的launch文件
我发现vins-mono的launch文件里面就有T265的launch文件 https://github.com/HKUST-Aerial-Robotics/VINS-Mono/tree/master/vins_estimator/launch 也是最开始从这篇博文里发现的 https://blog.csdn.net/sinat_16643223/article/details/
Realsense T265标定及运行VINS--kalibr和imu_utils
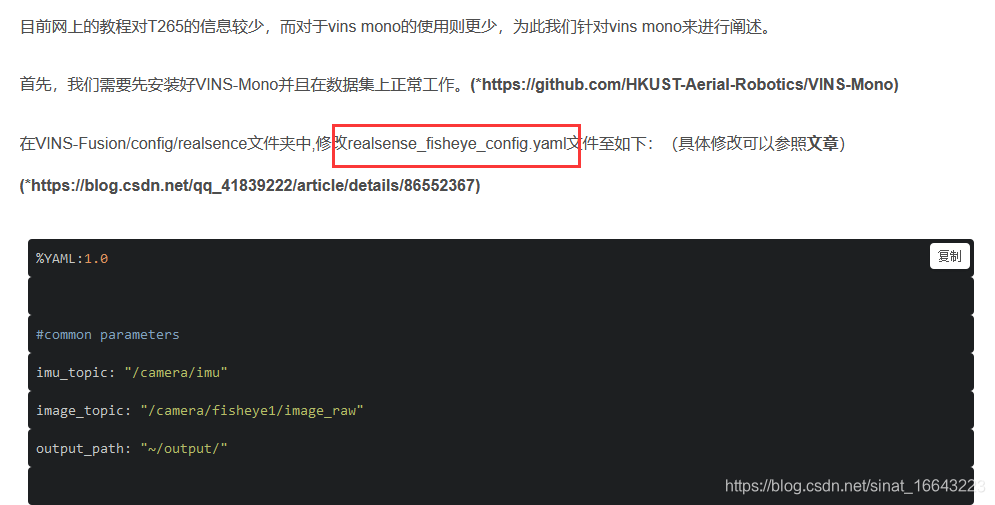
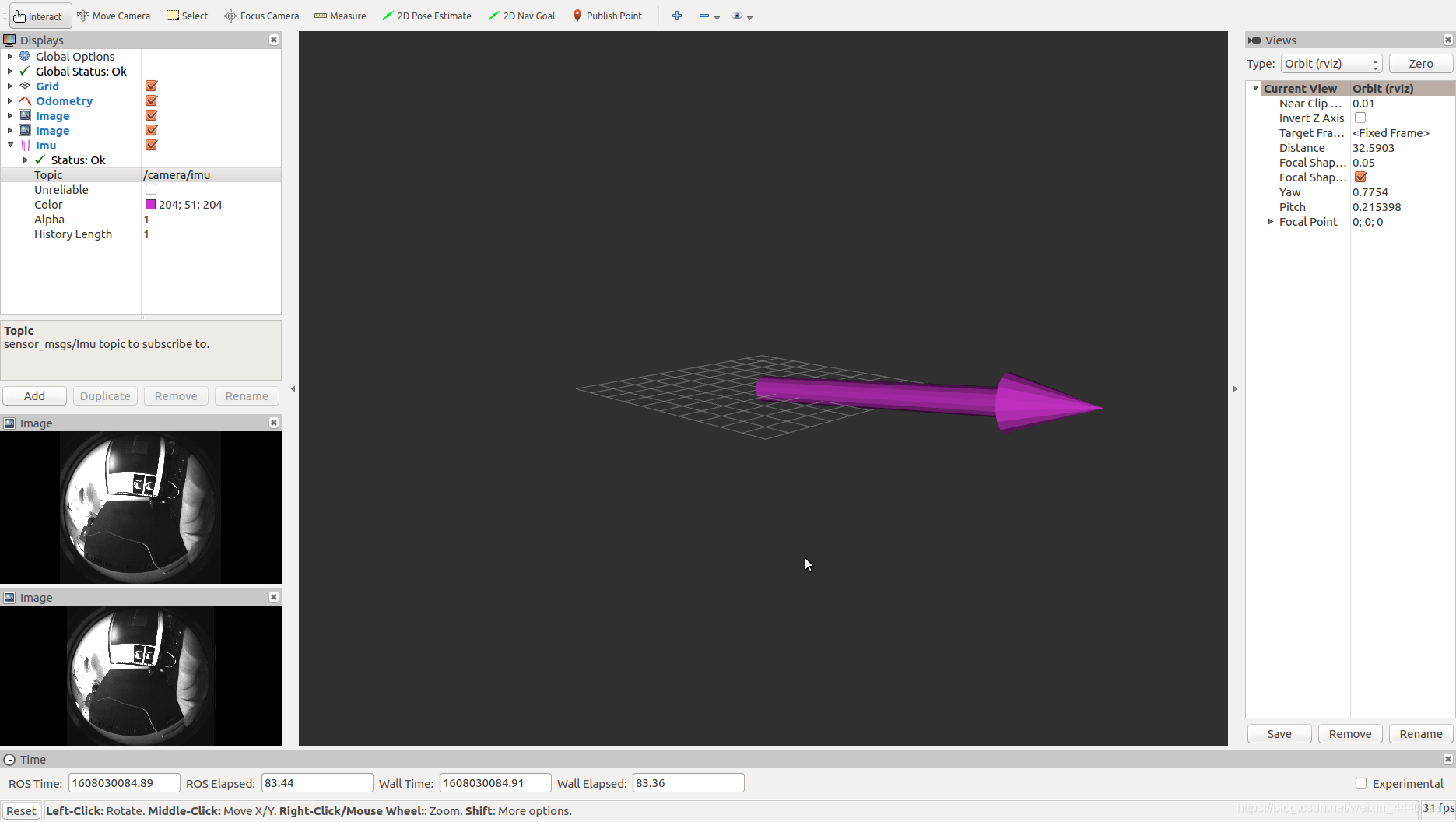
转载自:https://www.jianshu.com/p/194d6c9ef9a4 Realsense T265标定及运行VINS--kalibr和imu_utils 名字都被取完了妈个鸡 0.2552019.10.25 18:01:03字数 808阅读 7,194 因项目需要用T265跑VINS之类的算法,但网上关于realsense T265的资料较少,这两天爬了很多坑,算是把T26

使用Jetson Nano向PX4提供T265位置信息,实现室内定点飞行
使用的Jetson Nano镜像版本:4.6(2021-08-04发布) NVIDIA官方镜像下载链接 1.安装 ROS Melodic 参考官网安装教程 # 设置sources.listsudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/so
RealSense T265相机使用及运行ORB-SLAM3
1、驱动安装。同realsense D435i,不做介绍。 2、运行realsense-viewer查看效果 3、修改rs_t265.launch文件,查看运行效果,作如下修改: <arg name="enable_fisheye1" default="true"/><arg name="enable_fisheye2" default="true"/><arg nam
realsense-viewer 不识别 T265——Realsense SDK 在 v2.54.1 版本以后不再支持T265相机的解决办法
由于T265停产,Intel® RealSense™ SDK 2.0 (v2.54.1) 在该版本中移除了对T265相机的支持,以后的版本也不会支持了。为了继续使用 T265 相机,最好千万不要升级 realsense 相关的 package,但是还有新装机的需求啊。经测试Intel® RealSense™ SDK 2.0 (v2.53.1) 能对 T265 正常支持,因此,本文主要是总结如何安
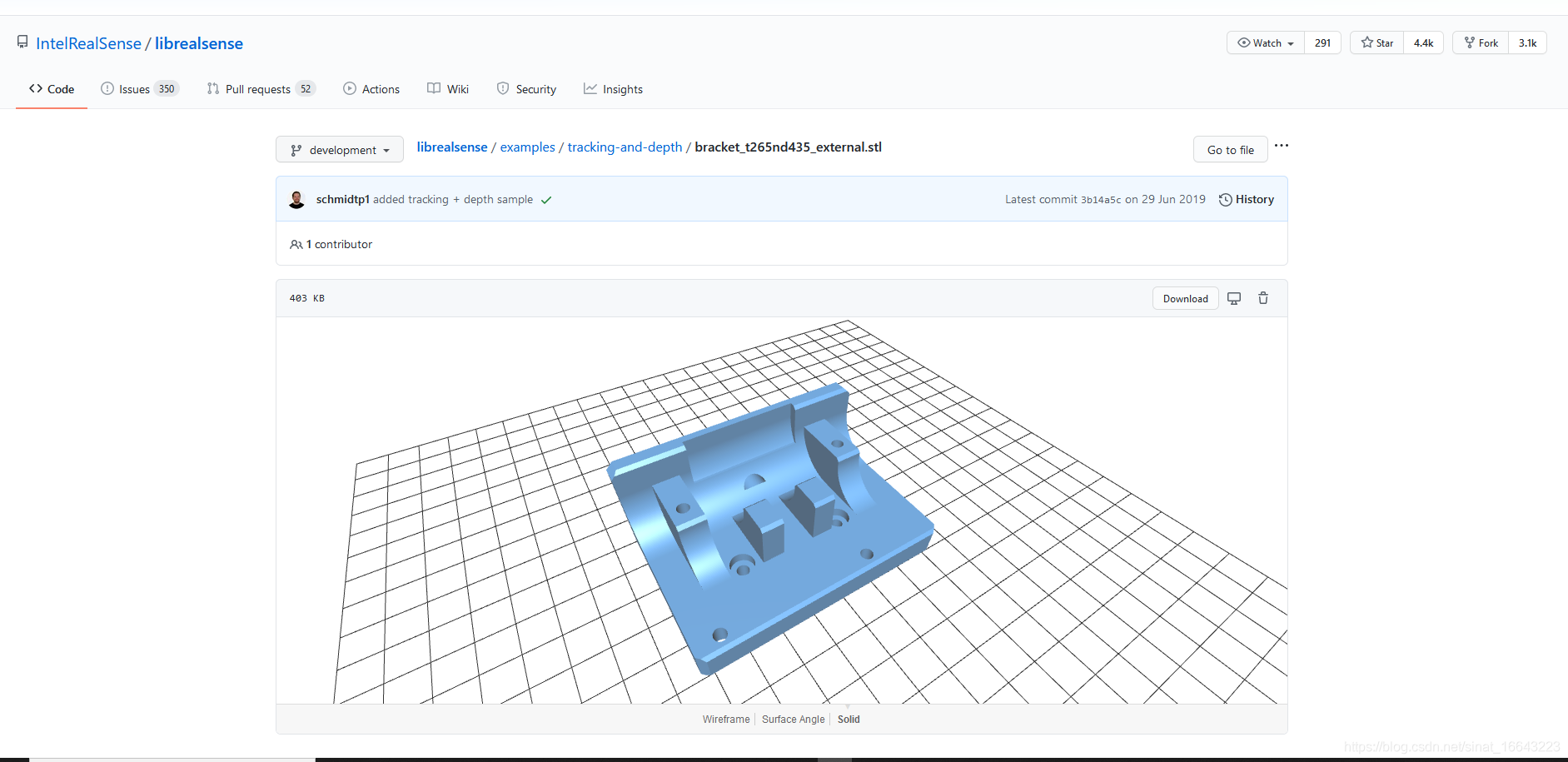
T265和D435i固定件3D打印模型(realsense官方提供的)
T265和D435i固定件3D打印模型(realsense官方提供的) 我也上传到我的百度网盘里了 最开始是在阿木的普罗米修斯项目看到的 https://github.com/amov-lab/Prometheus/wiki/D435i+T265%E5%BB%BA%E5%9B%BE https://github.com/IntelRealSense/librealsense/blo

树莓派4B+ROS+RealSense T265室内定位替代光流开源方案
硬件机载端:树莓派4B 4/8G 、T265、RPLIDAR-A2 配套开发环境: 树莓派系统Ubuntu 20.04.3 LTS RealSense SDK 2.0 ROS系统版本:noetic+realsense-ros 多平台远程登陆软件:nomachine(win10、mac、安卓、ubuntu等) 有两种方案实现t265位姿数据,本方案通过修改宏定义T265_STA