sift专题

OpenCV入门12.2:SURF与SIFT比较及SURF示例
SIFT (Scale-Invariant Feature Transform): 提出时间: 1999年,由David Lowe提出。关键特点: 能够检测和描述图像中的关键点,这些关键点对旋转、缩放和部分亮度变化具有不变性。计算复杂度: 相对较高,因为SIFT使用了高斯差分核来检测关键点,并且需要在多个尺度空间进行操作。应用: 广泛用于图像匹配、物体识别和3D重建。 SURF (Spee

【opencv】SIFT(尺度不变特征变换)算法?
关键词:SIFT Algorithm 文章目录 一、介绍二、什么是 SIFT 算法?2.1 SIFT 算法描述2.2 SIFT 算法示例 三、人类与机器识别3.1 SIFT 在计算机视觉中的应用3.2 SIFT 关键点的优势3.3 示例演示 四、关键点定位关键点选择 五、实验任务指导5.1 计算大小和方向5.2 创建震级和方向的直方图5.2 创建震级和方向的直方图5.3 关键点描述符5.4
描述一下SIFT特征提取算法的工作原理
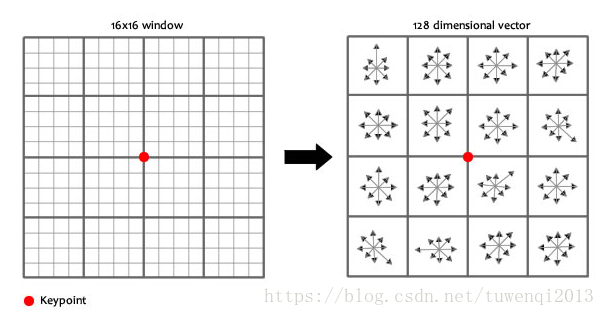
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)是由 David Lowe 于 1999 年提出的一种特征提取算法,用于检测和描述图像中的局部特征点。SIFT 特征具有旋转、尺度和光照不变性,因此在各种计算机视觉任务中广泛应用,如图像匹配、物体识别等。 SIFT 的工作原理主要分为四个步骤: 1. 尺度空间极值检测(Scale-Space Ext

HOG与SIFT特征学习
都点进这个链接了,我就不用再赘述这俩特征是干嘛的了吧。 我就不用再说一遍:他们分别是通过精妙的手工设计的一些方法,来对图像的进行特征提取,将图像中一堆像素转换成具有其内容特征的数字向量,因而可以用来给各种模型(如SVM)进行处理的一些特征。 HOG方向梯度直方图 Histogram of Oriented Gradient,在行人检测领域用的较多,DPM中也用到了HOG特征 主要思想: 在

matlab sift算法使用的记录
最近在做个三维建模的东西,用到了sift算子,需要在matlab上使用。网上介绍使用了 David Lowe的源代码。源码地址为: http://www.cs.ubc.ca/~lowe/keypoints/ 在使用的过程中,会出现以下错误: 不知道是为什么,在一片博客中看到图像大小大致要800*600的说明,我就猜想是不是因为我的图像太大了。原始图像3000*1200的,于是我就把图

【OpenCV】SIFT原理与源码
SIFT简介 Scale Invariant Feature Transform,尺度不变特征变换匹配算法,是由David G. Lowe在1999年(《Object Recognition from Local Scale-Invariant Features》)提出的高效区域检测算法,在2004年(《Distinctive Image Features from Scale-Inv

HOG ,SIFT 特征实现
http://blog.csdn.net/q123456789098/article/details/52748918 讲的很清晰 HOG特征: 方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应

A Short introduction to descriptors,附带SIFT描述子的基本原理
转载地址: https://gilscvblog.com/2013/08/18/a-short-introduction-to-descriptors/ Gil's CV blog A Short introduction to descriptors Since the next few posts will talk about binary descriptors, I t

机器学习--从K近邻算法、距离度量谈到KD树、SIFT+BBF算法
引言 最近在面试中,除了基础 & 算法 & 项目之外,经常被问到或被要求介绍和描述下自己所知道的几种分类或聚类算法(当然,这完全不代表你将来的面试中会遇到此类问题,只是因为我的简历上写了句:熟悉常见的聚类 & 分类算法而已),而我向来恨对一个东西只知其皮毛而不得深入,故写一个有关数据挖掘十大算法的系列文章以作为自己备试之用,甚至以备将来常常回顾思考。行文杂乱,但侥幸若能对读者起到一

在OpenCV3中SIFT,SURF等算法去哪了?
本人是在Windows 7下Anaconda 4.4配置的OpenCV,Python版本是3.6.1,如下图所示: 利用pip install opencv_python-3.3.0-cp36-cp36m-win_amd64.whl 进行安装,安装成功,import cv2没出错,但是在 进行 detector=cv2.SIFT()时显示错误:AttributeError: module
翻译 | ORB: An efficient alternative to SIFT or SURF(ORB:对SIFT或SURF的一种有效选择)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ORB:对SIFT或SURF的一种有效选择 ORB: an efficient alternative to SIFT or SURF 译者:Michael Beechan(陈兵) 重庆理工大学 Ethan Rublee Vi

计算机视觉与模式识别实验2-2 SIFT特征提取与匹配
文章目录 🧡🧡实验流程🧡🧡SIFT算法原理总结:实现SIFT特征检测和匹配通过RANSAC 实现图片拼接更换其他图片再次测试效果(依次进行SIFT特征提取、RANSAC 拼接) 🧡🧡全部代码🧡🧡 🧡🧡实验流程🧡🧡 SIFT算法原理总结: 1.创建尺度空间: 高斯模糊去除噪声,强调了图像的重要特征 根据原图创建不同比例的新图像 2.采用高斯差异DO
数字图像处理成长之路13:SIFT之尺度空间c++版
之前我从没听说过SIFT,真的是从零开始,而且是一个人自学。看了很多文章,下面这两篇不错: http://www.cnblogs.com/starfire86/p/5735061.html http://www.cnblogs.com/JiePro/p/sift_1.html 有些理论看多了也还是似懂非懂,真正自己用代码试着去

opencv中关于sift匹配
opencv提供一个knnMatch函数,可以获取两个图片sift特征点的最近匹配距离以及次近匹配距离。 BruteForceMatcher< L2<float> > matcher;vector<DMatch> good_matches;matcher.knnMatch(description2, description1, ratio_matches, 2); match函数的参数中位

非常详细的sift算法原理解析
尺度不变特征变换匹配算法详解 Scale Invariant Feature Transform(SIFT) Just For Fun 转自:http://blog.csdn.net/zddblog/article/details/7521424 对于初学者,从David G.Lowe的论文到实现,有许多鸿沟,本文帮你跨越。 1、SIFT综述 尺度不变特征转换(Scale-
SIFT特征匹配算法介绍——寻找图像特征点的原理
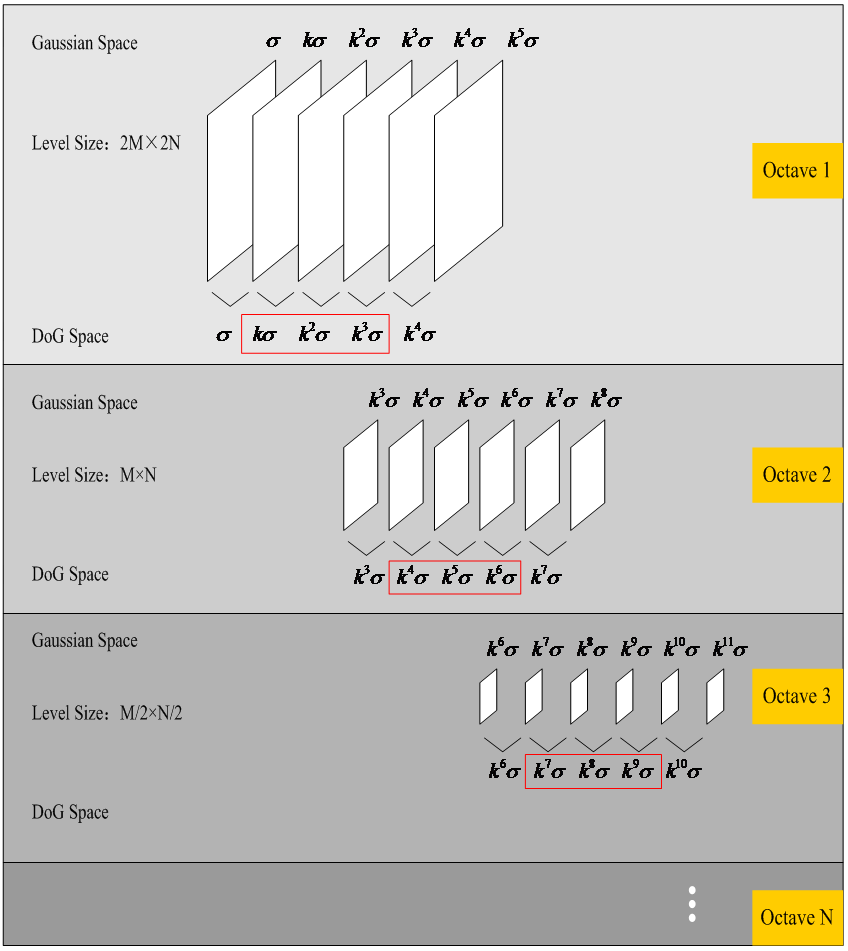
1.图像尺度空间 在了解图像特征匹配前,需要清楚,两张照片之所以能匹配得上,是因为其特征点的相似度较高。 而寻找图像特征点,我们要先知道一个概念,就是“图像尺度空间”。 平时生活中,用人眼去看一张照片时,随着观测距离的增加,图像会逐渐变得模糊。那么计算机在“看”一张照片时,会从不同的“尺度”去观测照片,尺度越大,图像越模糊。 那么这里的“尺度”就是二维高斯函数当中的σ值,一张照片与二维高斯
【C++PCL】点云处理3D-SIFT关键点提取(Z方向梯度约束)
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 2.代码效果 3.源码展示 4.
SIFT算法核心思想
Scale Invariant Feature Transform,尺度不变特征变换匹配算法,是由David G.Lowe在1999年(《Object Recognition from Local Scale-Invariant Features》)提出的高效区域检测算法,在2004年(《Distinctive Image Features from Scale-Invariant Keypoin
基于OpenCv的图像SIFT特征点检测和特征匹配
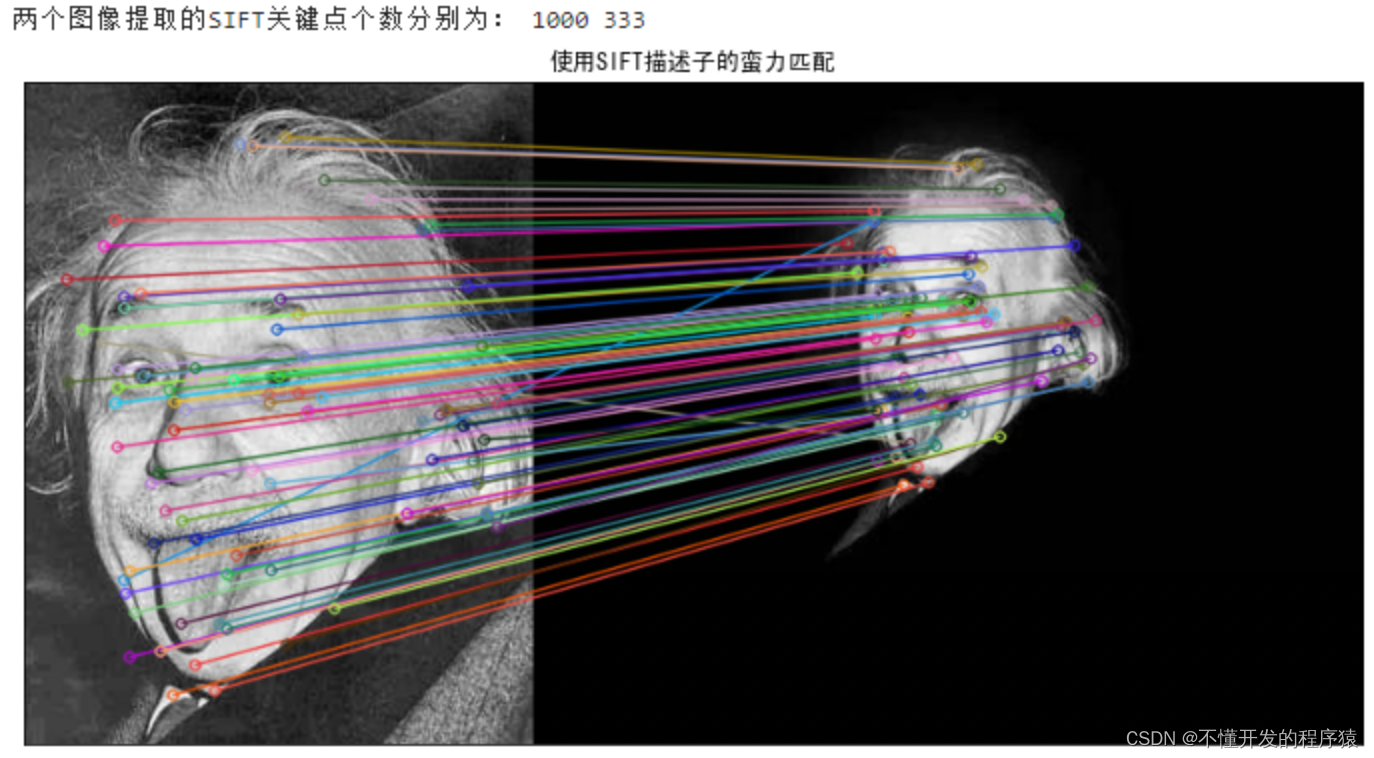
⚠申明: 未经许可,禁止以任何形式转载,若要引用,请标注链接地址。 全文共计3077字,阅读大概需要3分钟 🌈更多学习内容, 欢迎👏关注👀【文末】我的个人微信公众号:不懂开发的程序猿 个人网站:https://jerry-jy.co/ ❗❗❗知识付费,🈲止白嫖,有需要请后台私信或【文末】个人微信公众号联系我 基于OpenCv的图像SIFT特征点检测和特征匹配 基于OpenCv

三种强大的物体识别算法——SIFT/SURF、haar特征、广义hough变换
转自:http://blog.csdn.net/cy513/article/details/4285579 SIFT/SURF基于灰度图(适用于:刚性物体,如建筑物) 一、首先建立图像金字塔,形成三维的图像空间,通过Hessian矩阵获取每一层的局部极大值,然后进行在极值点周围26个点进行NMS,从而得到粗略的特征点,再使用二次插值法得到精确特征点所在的层(尺度),即完成了尺度不

【知识】pycolmap.Sift.extract的参数和返回格式
转载请注明出处:小锋学长生活大爆炸[xfxuezhagn.cn] 如果本文帮助到了你,请不吝给个[点赞、收藏、关注]哦~ import pycolmap# 比较推荐的参数options = {"peak_threshold": 0.0066667,"edge_threshold": 10,"first_octave": -1,"num_octaves": 4,"normalization
特征提取与检测(二) --- SIFT算法
SIFT(Scale-invariant feature transform)是一种检测局部特征的算法,该算法通过求一幅图中的特征点(interest points,or corner points)及其有关scale 和 orientation 的描述子得到特征并进行图像特征点匹配,获得了良好效果,详细解析如下: 一、SIFT算法综述 特点: 1. SIFT特征是图像的局部

OpenCV基本图像处理操作(十一)——图像特征Sift算法
图像尺度空间 在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然而计算机要有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同的尺度下都存在的特点。 尺度空间的获取通常使用高斯模糊来实现 不同σ的高斯函数决定了对图像的平滑程度,越大的σ值对应的图像越模糊。 多分辨率金字塔 高斯差分金字塔(DOG) 定义公式 D ( x , y ,
通俗易懂降维理解------SIFT【大白话版】!!!
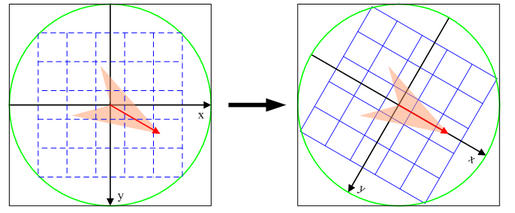
SIFT(尺度不变特征变换)是一种在计算机视觉中用来发现图像中特定点(特征点)并能够精确描述这些点的方法,这样即使在图像的大小、角度或光线变化后,这些点仍然可以被识别和匹配。简单来说,SIFT帮助计算机理解图像中的重要部分,并能在其他图像中找到这些相同的部分,就像人类通过观察相似特征来识别相同的物体一样。 一、SIFT的主要思想: 特征点检测(找到那些可能代表图像中的显著特征的点) 主要
计算机视觉SIFT算法详解
非图像处理领域,只是好奇,想了解下。 转自:http://blog.csdn.net/zddblog/article/details/7521424 尺度不变特征变换匹配算法详解 Scale Invariant Feature Transform(SIFT) Just For Fun zdd zddmail@gmail.com or (zddhub@gmail.com)