本文主要是介绍SIFT算法核心思想,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Scale Invariant Feature Transform,尺度不变特征变换匹配算法,是由David G.Lowe在1999年(《Object Recognition from Local Scale-Invariant Features》)提出的高效区域检测算法,在2004年(《Distinctive Image Features from Scale-Invariant Keypoints》)得以完善。
现将自己阅读相关论文后所理解的东西进行简单的总结,方便今后进行查阅和完善。
高斯金字塔的构造
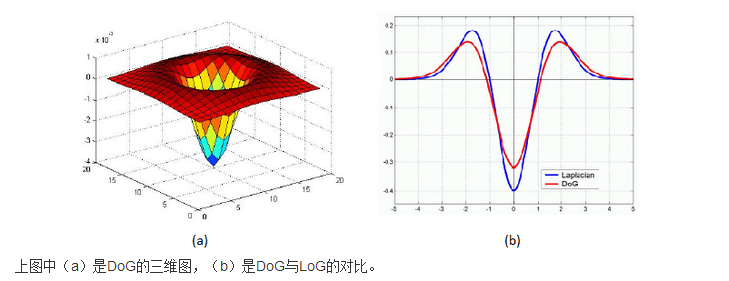
尺度空间理论虽然提出很早,但David G. Lowe将其用在影像特征提取里面巧妙的解决物体缩放、分辨率不一致的问题,利用高斯核(已经证明高斯核是唯一的可产生尺度影像的卷积核)对图像做卷积运算,根据不同的高斯核参数生成不同尺度的影像,这样就模拟的现实世界本身存在的人眼在观察事物时的尺度现象,用作者1999年论文中的原话说:This approach is based on a model of the behavior of complex cells in the cerebral cortex of mammalian vision。高斯差分金字塔的构造
利用第一步创建的多尺度影像进行差分运算就得到了高斯金字塔(DOG),故名思议,其产生了“高斯”+“金字塔”两种效果,高斯金字塔是为下一步“搜索关键点”做好铺垫。其巧妙之处在于利用简单的易于编程实现的办法得到经典的高斯拉普拉斯(LOG)效果,DOG的实质是对LOG的近似,而且有严格的理论推导(推导的公式见2004年作者的论文)。
关键点的搜索和定位
有了DOG就可以在临近的两层DOG以及所在层进行局部临近的比较,搜索出最大值点以及最小值点;其比较的范围是以目标为中心的3×3×3的立方体,搜索到初始位置后还需要利用泰勒展开式进行曲线拟合进行关键点的精确定位。方向赋值
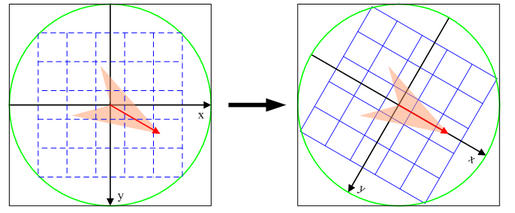
方向赋值主要是利用梯度方向直方图计算出关键点主方向,因为后期将计算相对于该主方向一系列梯度方向,因为物体可以旋转,所以说不能用物方世界绝对的方向来描述关键点的特性。关键点的描述
后期要进行影像匹配,必须要对关键做出独一无二(Distinctive)的描述,这样才能进行一对一的匹配。SIFT是利用关键的局部梯度特性进行独一性描述的,计算关键点周围像素的梯度值,并分块进行统计,然后计算出相对于主方向的方向,这里非常关键的一点就是计算临近点相对主方向的梯度方向,这样就使得特征具有旋转不变性。
相关参考:
http://blog.csdn.net/xiaowei_cqu/article/details/8069548
http://blog.csdn.net/zddblog/article/details/7521424
这篇关于SIFT算法核心思想的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








