sick专题
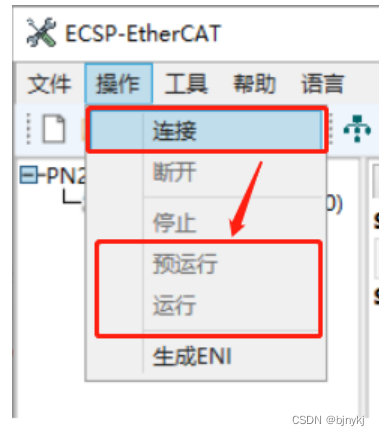
EtherCAT转PROFINET网关连接PLC与Sick传感器
西门子S7-1200/1500系列的PLC,需要连接带EtherCAT的通讯功能的伺服驱动器,传感器等设备。西门子的PLC采用PROFINET实时以太网通讯协议,要连接EtherCAT的设备,就必须进行通讯协议转换。该网关提供了快速可行的解决方案。EtherCAT转PROFINET支持两种实时以太网通讯协议之间的转换,可以主通讯主站(加主站授权),也可以做通讯从站,两个网络独立运行,通过网关内部进

SICK激光传感器:LMS400生成表面点云
简介 SICK LMS400是德国SICK公司生产的单线型激光传感器,主要应用于室内场景的测量,打出的激光是650nm可见红光,其主要参数如下: 性能:扫描频率300Hz-500Hz、角度分辨率0.1°-1.0°可选、工作区域0.7m-3.0m、水平测量角度70°、测量精度±4mm;接口:Ethernet(TCP/IP协议)、RS232串口;电子参数:供电电压24VDC、功耗25W、外壳防

linux系统下ROS调试SICK TIM581激光雷达
激光雷达的连接 网口连接 如图所示,连接成功 安装软件包: 我用的雷达是Tim581系列 选择功能包sick_tim:支持tim XX系列雷达。 我的软件包是师傅给的,我就没有下载。 需要的可以联系我。 直接把功能包(sick_tim)把复制过去工作空间,然后 catkin_make 编译。 有以下内容,说明你成功了。 3. 读取激光雷达数据 把value改为激光雷达的IP地址。
SICK LMS41XXX的使用
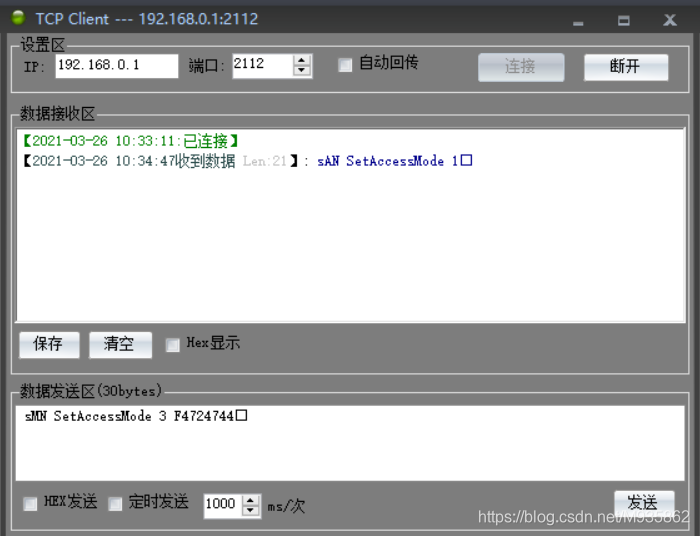
SICK LMS41XXX的使用——新手指导 SOPAS使用问题 在使用LMS41xxx的过程中,使用官方软件SOPAS出现了一些小问题。 输入错误情况 测量物体距离时,使用终端返回数据可选择不成帧\Cola ASCII\Cola Binary\Cola 2以及自定义模式,如图所示: 然而在输入命令,控制雷达传感器时,只有在使用Cola Binary模式可以直接输入命令,得到正确的反馈
【学习笔记】手把手教你使用Autoware标定SICK-2D激光雷达和相机
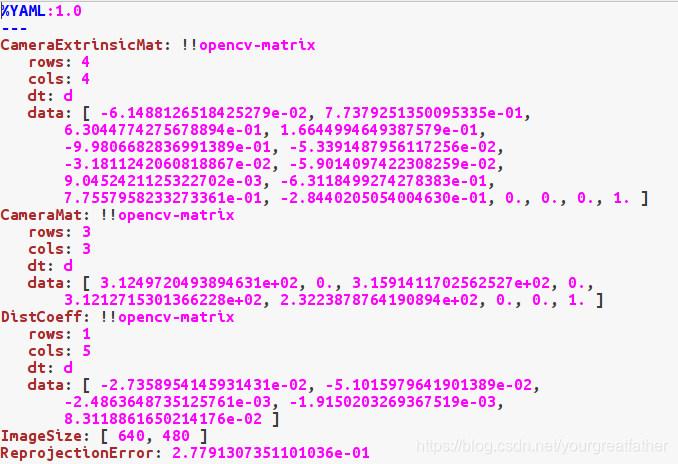
2019/06/21更新说明:很多小伙伴反应从github上下载的Autoware没有Calibration Toolkit,是作者在github 的新源码和我用的版本不一样了。该教程仅针对2018年11月7日的发布版本。 网上Autoware的教程不多,而且都是关于多线的威力登雷达和相机的联合标定。自己摸索使用Autoware标定SICK TIM561单线激光雷达和相机的方法,写一个详细的

ROS 连接SICK LMS100激光,并用RVIZ显示(网线端口)
一样,先上图 1.去https://github.com/clearpathrobotics/lms1xx.git下载*.zip,解压并保存到~/catkin_ws/src中 2. 准备