s32k3专题
S32K3 工具篇1:新手如何安装S32DS RTD4_0_0
S32K3 工具篇1:新手如何安装S32DS RTD4_0_0 一, 软件下载1.1 RTD 下载1.2 S32DS IDE 和 更新包 下载1.3 S32K3XX development 包下载 二, 软件安装2.1 安装S32DS IDE2.2 安装 IDE update,development,RTD 三, 工程导入四,代码下载与结果验证 大家好,我是火山,一个从事嵌入式行业

【S32K3 MCAL配置】-7.2-GPT Driver:仿OS,周期/定时调用APP SWC和BSW模块的主函数
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 案例背景:当没有移至FreeRTOS时,如何仿OS,快速搭建“若干个周期执行的Task”,在其中周期/定时调用APP SWC和BSW模块的主函数。 并在这个简易的仿OS中,如何设置“主函数调用的先后顺序”,以及如何设置“主函数延时调用的时间”。 目录(共6页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你

【S32K3 MCAL配置】-7.1-GPT Driver:定时器中断-创建一个周期执行的任务
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 案例背景:常用于周期点亮/关闭一个LED灯;或者精度一般的占空比为50% PWM方波;或者周期调用一个函数,在该函数中我们可以执行一些软件策略(简易的OS)。 目录(共15页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通) 实现的架构:基于MCAL层 前期准备工作:</

【S32K3 MCAL配置】-4.3-CAN Driver:不使用RTD中CanIf模块来实现接收/发送CAN帧报文
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 目录(共4页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通) 实现的架构:基于MCAL层 前期准备工作:
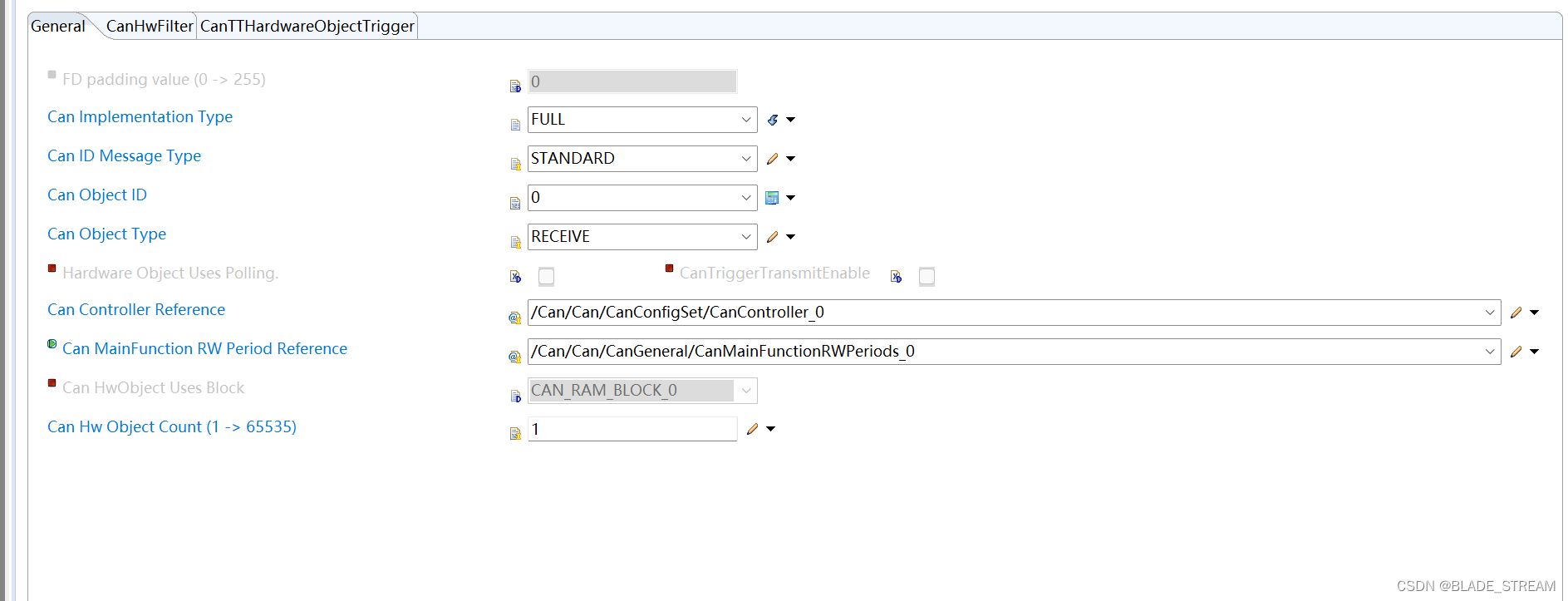
【S32K3 MCAL配置】-4.2-CAN Driver:CanObjectId排序规则,其影响CAN报文的收发
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 目录(共7页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通) 实现的架构:基于MCAL层 前期准备工作:
【S32K3 MCAL配置】-3.2-CANFD配置-发送“经典CAN/CANFD标准帧“和“经典CAN/CANFD扩展帧“(基于MCAL+FreeRTOS)
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 目录 实现的架构:基于MCAL层 前期准备工作: 1 评估板S32K312EVB-Q172中CAN外设
【S32K3驱动配置】-1.2-GPIO配置及其应用-DIO之高低电平输入-按键(基于SDK)
"><--返回「Autosar_MCAL高阶配置」专栏主页--> 目录(共9页精讲,基于评估板: NXP S32K312EVB-Q172,手把手教你S32K3从入门到精通) 实现的架构:基于Drivers层(以往的SDK) 前期准备工作:
【S32K3 MCAL配置】-1.1-GPIO配置及其应用-点亮LED灯(基于MCAL)
目录(共13页精讲,手把手教你S32K3从入门到精通) 实现的架构:基于MCAL层 前期准备工作: 1 创建一个FREERTOS工程
【S32K 进阶之旅】 NXP S32K3 以太网 RMII 接口调试(2)
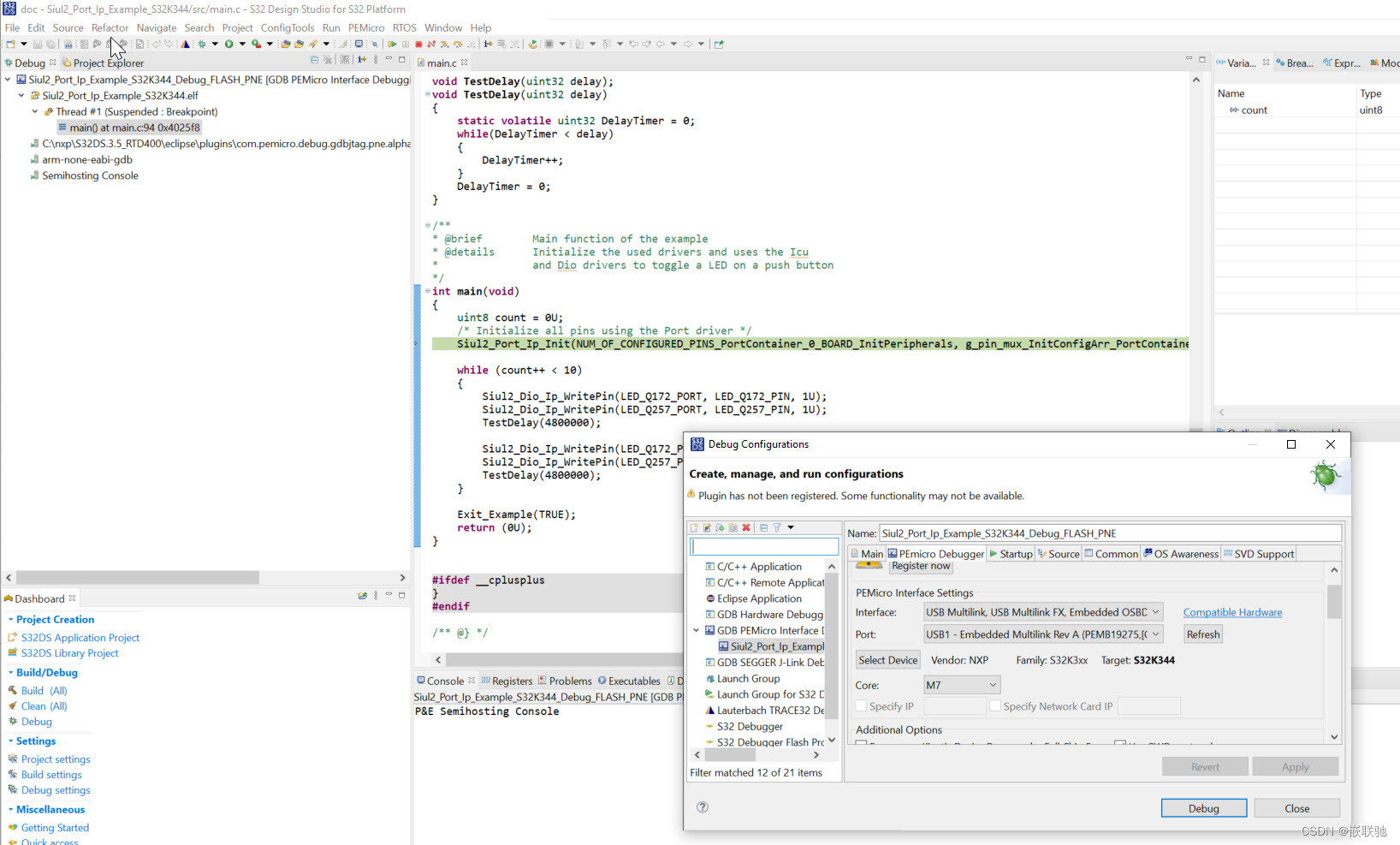
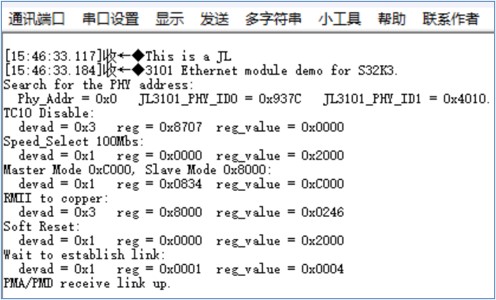
前言 前文介绍了 NXP S32K3 以太网 RMII 接口调试的开发环境搭建,下面开始详解软件调试步骤。没看过第一节的小伙伴请移步《【S32K 进阶之旅】 NXP S32K3 以太网 RMII 接口调试(1)》,话不多说我们直接进入正题。 lwip Stack 介绍 TCP/IP Stack 是 TCP/IP 协议套件的轻量级实现,而实现 lwIP TCP/
【S32DS RTD实战】-1.4-基于S32K3创建配置FreeRTOS工程-控制GPIO点亮LED
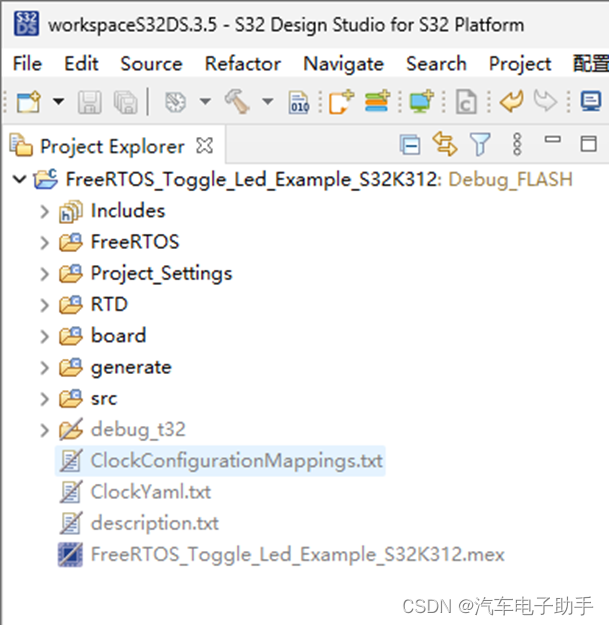
目录(附DEMO,可下载,讲解过程超详细) 1 下载FREERTOS RTD 1.1 安装FREERTOS RTD 2 确认S32DS已安装的AUTOSAR RTD 3 基于S32K3创建&配置FREERTOS工程 3.1 选择SDKs 3.2 增加FreeRTOS模块 3.3 修改MCU芯片封装 3.4 配置GPIO 3.5 修改HSE CLK时钟 3.5 更新代码 4 m
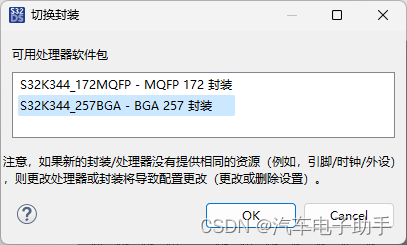
【S32DS RTD实战】-1.2-切换S32K3芯片的封装MAPBGA,HDQFP,LQFP Package
【S32K3_MCAL从入门到精通】合集: S32K3_MCAL从入门到精通https://blog.csdn.net/qfmzhu/category_12519033.html 在博文【S32DS RTD实战】-1.1-S32K3创建工程并控制一个GPIO点亮一个LEDhttps://blog.csdn.net/qfmzhu/article/details/134916666中,我们在S32
S32K3 MCAL CAN配置详解 基于EBtresos
CAN 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。 CAN的组成一般有两种方式:一种是CPU与CAN driver成到一起、再外接CAN收发器;另一种是CPU与CAN控制器分开的,使用的时候
【S32K3学习笔记】FlexCAN
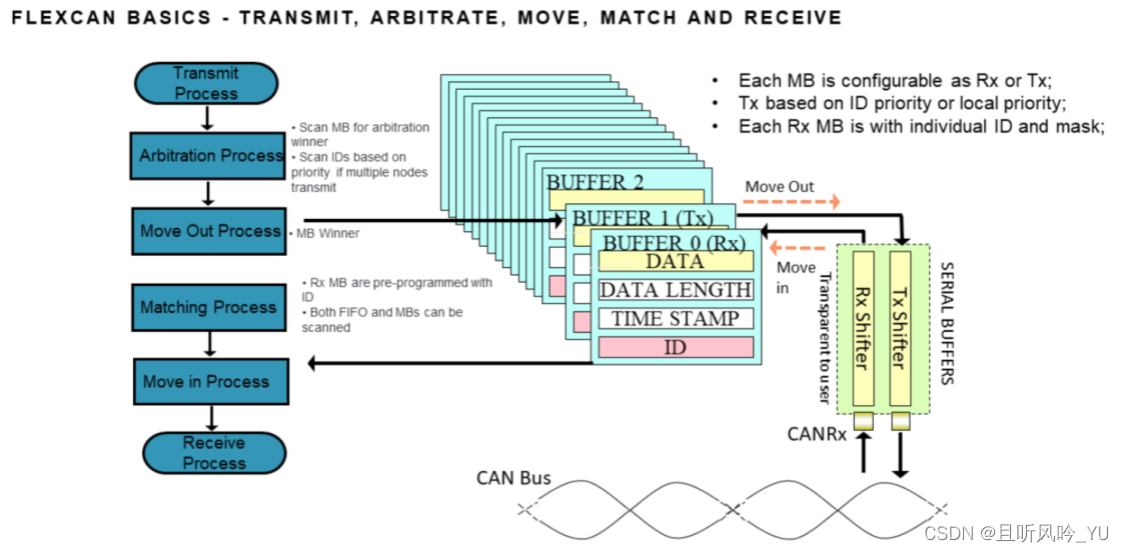
文章目录 前言一、CAN是什么?二、CAN框架1.MBs结构2.工作流程3.常用API 总结 前言 由于之前没有接触过CAN总线模块,对这一块的知识仍比较陌生,于是乎想简单梳理一下CAN总线的工作流程,加深理解。 一、CAN是什么? 参考:https://zhuanlan.zhihu.com/p/346696648 二、CAN框架 各模块功能如下: 协议引擎Prot
NXP S32K3系列学习笔记——FlexCAN驱动开发
“点点的学习日记” 前言 一、FlexCAN是什么? 1.概括 2. 邮箱结构 二、通信波特率设置 三、FlexCAN模块初始化 四、发送、接收与匹配过程 1. 发送过程 2. 接收过程 3. 匹配过程 五、特殊功能 1. 邮箱锁机制 2. MCR[SRXDIS] 自接收功能 前言 学习NXP S32K3系列芯片笔记,内容大多通过阅读官方RM

【S32K3学习笔记】配置FlexCAN接收指定CANID
1.打开IP FlexCAN Driver界面配置 CAN0支持128个邮箱,这里开启96个邮箱,开启FIFO Filters模式(此模式下每个邮箱可以配置成接收指定的4个CANID),共支持接收指定的128个CANID,波特率为500K 2.代码初始化 void CAN_Init(void) { //FlexCAN0 FlexCAN_Ip_Init(IN