本文主要是介绍【S32K3学习笔记】FlexCAN,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 一、CAN是什么?
- 二、CAN框架
- 1.MBs结构
- 2.工作流程
- 3.常用API
- 总结
前言
由于之前没有接触过CAN总线模块,对这一块的知识仍比较陌生,于是乎想简单梳理一下CAN总线的工作流程,加深理解。
一、CAN是什么?
参考:https://zhuanlan.zhihu.com/p/346696648
二、CAN框架
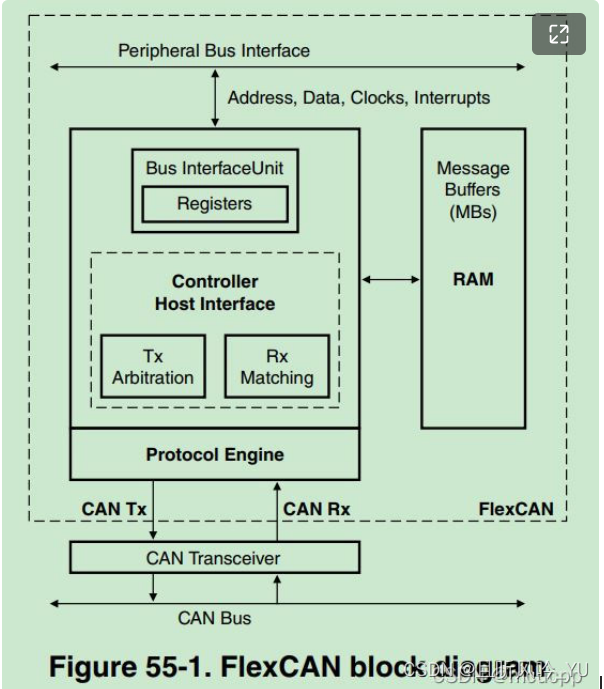
各模块功能如下:
协议引擎Protocol Engine (PE)
PE用于管理CAN总线上的串行通讯: 请求RAM访问用于接收、发送消息帧;验证接收的消息; 运行错误处理; 探测CAN FD帧。
控制器主机接口Controller Host Interface (CHI)
CHI用于管理接收、发送的消息缓存( message buffer),负责仲裁和ID匹配。
总线接口单元Bus Interface Unit (BIU)
BIU用于控制访问内部总线,建立与CPU和其他模块的联系。包括时钟、寻址、数据总线、中断、DMA的访问都是通过BIU.
1.MBs结构
关于对消息邮箱的理解:消息邮箱属于CAN外设的硬件组成部分,其实际上是一种有着固定格式的数据存储区域(RAM)。
寄存器占128Bytes, 地址偏移从0x80 to 0x27F 分配给32个128位(4字)的MBs消息邮箱。
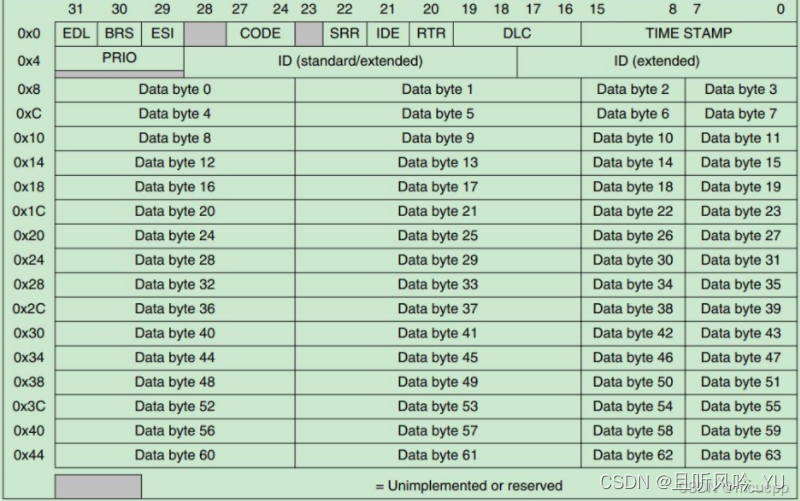
各字段含义:
EDL : 扩展数据长度,区分CAN和CAN FD格式帧。
BRS:Bit Rate Switch,使能CAN FD中的Bit Rate开关。
ESI :错误状态指示灯,指示传输节点是否处于错误状态。
CODE:总线状态
SRR:替代远程请求,固定隐性位,仅在扩展格式中使用。
IDE: ID扩展位,用于标识标准ID或扩展ID。
RTR:远程传输请求,影响远程帧,接收过滤器的一部分。
DLC:数据长度
PRIO:邮箱的优先级
TIME:时间戳,记录每一帧的时间
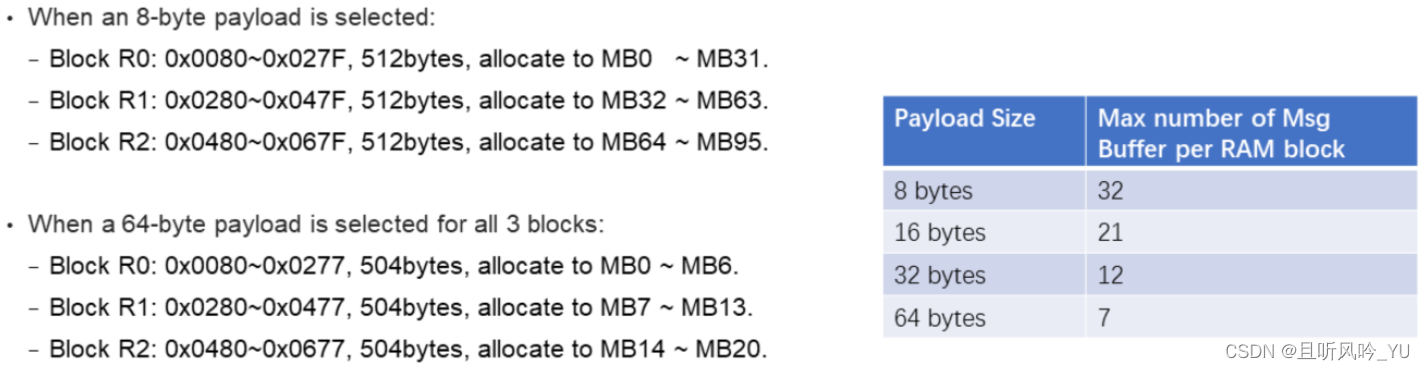
消息邮箱的数量取决于所设定的数据负载的大小,通常分配如下:
2.工作流程
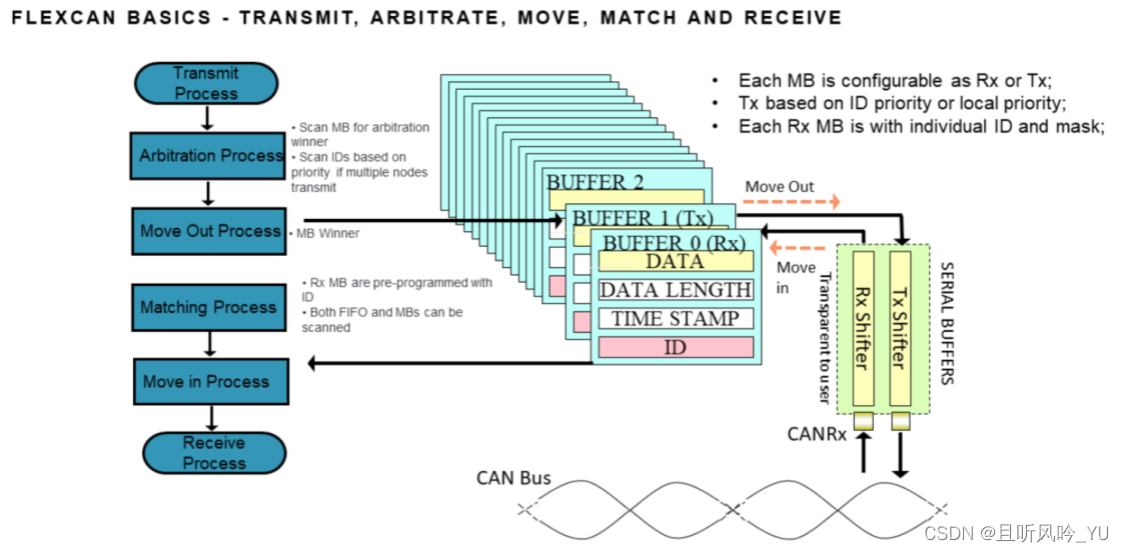
发送过程
1、选择一个MB
2、写入ID
3、写入负载数据字节数
4、设置MB
5、激活MB发送CAN帧
当MB激活后,将参与仲裁过程,最终根据优先级发送出去。当发送成功后,相关的状态寄存器被更新。
仲裁过程
仲裁过程扫描MBs,从低编号到高编号,选择一个arbitration winner用于在下次发送。
当找到arbitration winner,其被拷贝到一个隐藏的辅助性的Tx Serial Message Buffer (Tx SMB),【move-out】。在第一个CAN BUS机会窗口,Tx SMB中内容根据CAN协议规范发送出去。
接收过程
1、邮箱失能
2、写出ID
3、将EMPTY代码(0b0100)写入code字段以激活邮箱。
在MB激活后,它能够根据滤波设计接收帧,在接收成功后,MB被【move-in】过程更新。
CPU应查询 IFLAG registers 而不是消息邮箱的CODE域。
搬运处理
Move_in
复制Rx SMB接收到的消息到Rx mailbox或者匹配的FIFO,若到Rx FIFO,消息的属性也复制到 CAN_RXFIR FIFO。每个Rx SMB有各自的move-in处理,但同一时刻只有一个是运行着的。
Move_out
当有消息可供传输时,复制Tx mailbox的内容到Tx SMB。
3.常用API
FlexCAN_Ip_Init(obj->pBase->flexCan, obj->pBase->sateType, obj->pBase->configType);
//主要是使能模块,初始化 ECC (FlexCAN_ClearRAM ),清空中断标志,关闭 IMASK 中所有中断,设置 CAN FD ,位时间, bus off 自动恢复,初始化状态结构体等等
FlexCAN_Ip_SetStartMode(obj->pBase->flexCan);
//将CAN总线状态设置为启动模式
FlexCAN_Ip_SetBitrate_Privileged(obj->pBase->flexCan, &obj->pBase->bitrate, FALSE);
//设置波特率
FlexCAN_Ip_ConfigRxMb(obj->pBase->flexCan, obj->pBase->rxMailbox[obj->pBase->rxMailboxLen-1].msgObjId, &canDataInfo, id);
//初始化接收报文缓存区即配置接收邮箱
FlexCAN_Ip_Send(obj->pBase->flexCan, obj->pBase->txMailbox[txIdx].msgObjId, &canDataInfo, pMsg->id, sendData);
//发送数据
FlexCAN_Ip_Receive(obj->pBase->flexCan, obj->pBase->rxMailbox[rxIdx].msgObjId, &rxData, TRUE);
//接收数据
总结
CAN模块所涉及到的知识点远不止于此,本篇只是对其工作流程作了一个简单的梳理,其内部细节仍需画大量的时间不断实践,方才能运用自如。其他内容可参考NXP所给出的应用案例,深入了解。
这篇关于【S32K3学习笔记】FlexCAN的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







