本文主要是介绍S32K3 MCAL CAN配置详解 基于EBtresos,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
CAN
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。
CAN的组成一般有两种方式:一种是CPU与CAN driver成到一起、再外接CAN收发器;另一种是CPU与CAN控制器分开的,使用的时候需要配置CAN接口电路,比较麻烦。市面上的MCU基本都采用了CPU与CAN driver集成到一起的方式。
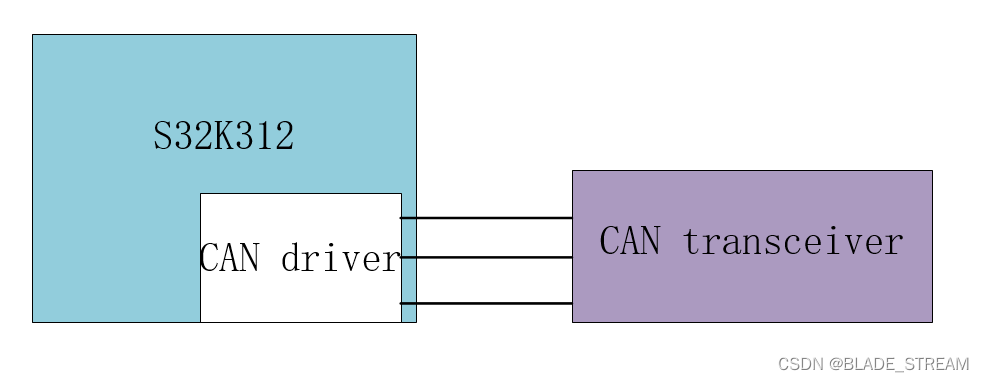
CAN 收发器选择NXP TJA1044,有三个引脚与芯片连接,分别是:
CAN RX
CAN TX
CAN STB
CAN RX与CAN TX掌管信号收发,CAN STB掌管模式控制
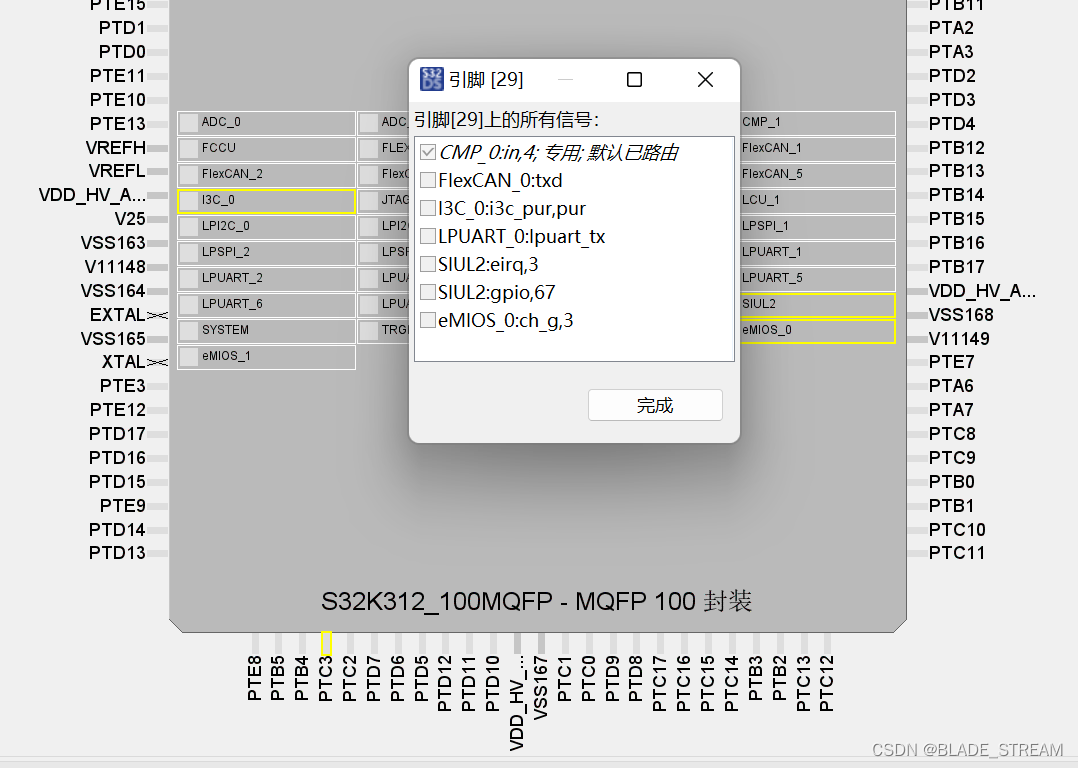
我们选择FLEXCAN_0,在S32DS查看FLEXCAN_0,可以选择PTC3和PTC2作为其信号收发管脚,在PORT模块将上述引脚配置为FLEXCAN_0的信号收发引脚,同时配置一个DIO输出管脚,作为STB

在CanController选项卡下新建一个配置项,双击打开:
在general界面下硬件选择FLEXCAN_0,该界面下主要配置时钟参考点和波特率
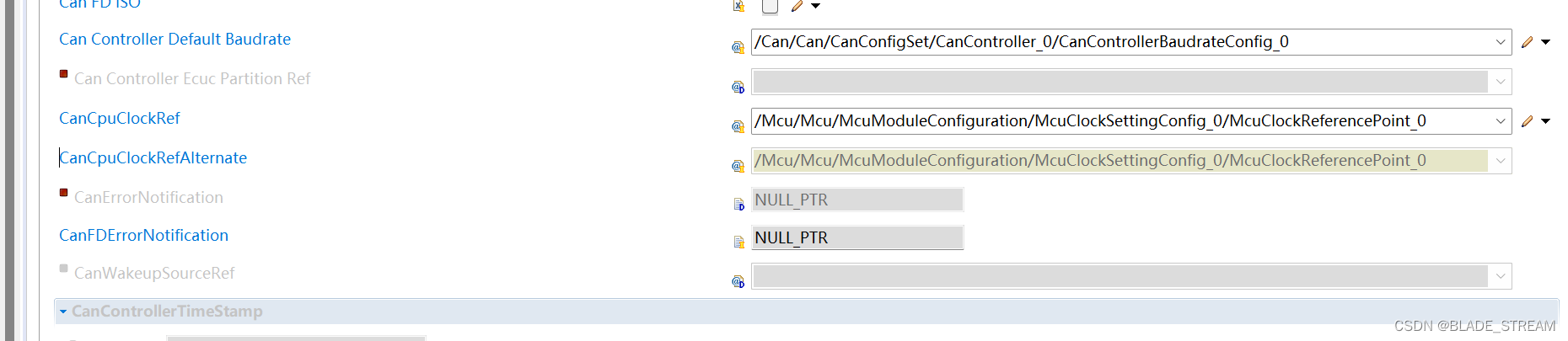
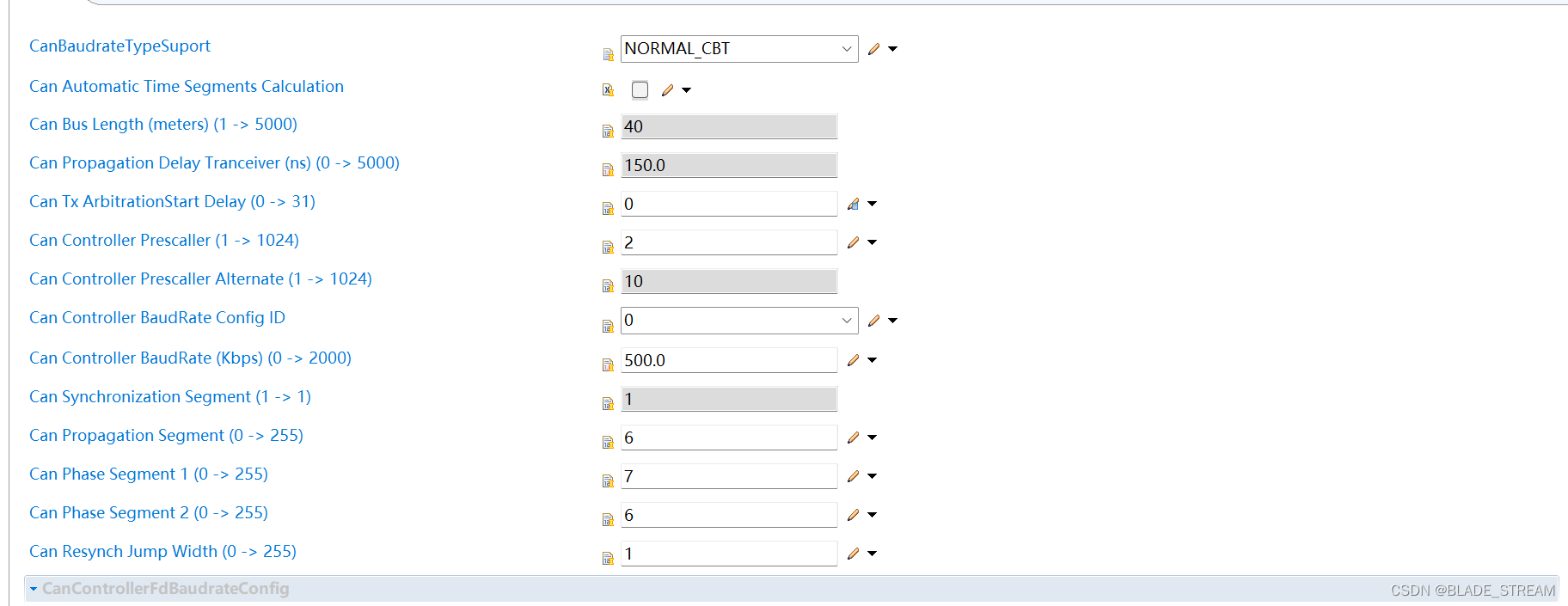
其中:时钟参考点在当前时钟树下选择AIPS_PLAT_CLK(60MHz,这个根据自己配置的时钟树选择),波特率在后面一个选项卡进行配置
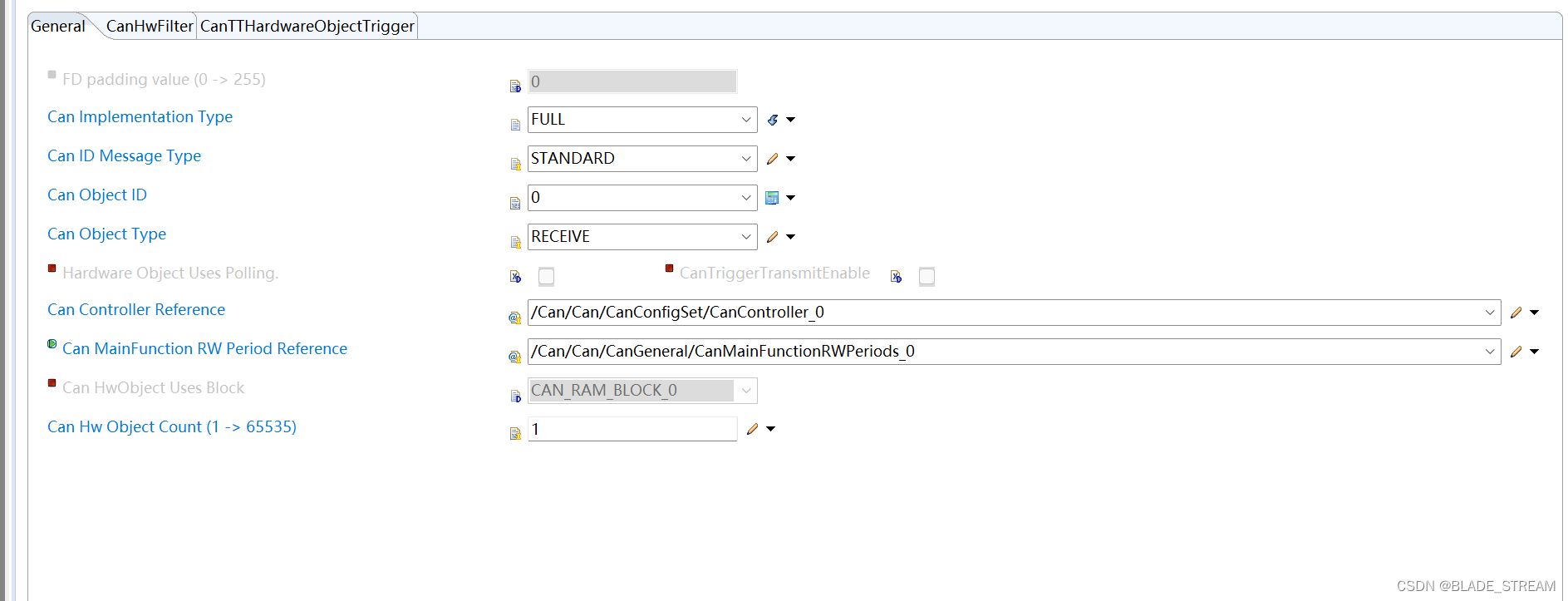
然后就是配置CAN模块的CanHardwareObject,我的理解是CAN的邮箱,示例如下:
这篇关于S32K3 MCAL CAN配置详解 基于EBtresos的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








