rt1060专题

NXP RT1060学习总结 - fsl_flexcan 基础CAN函数说明 -2
概要 CAN测试源码: https://download.csdn.net/download/qq_35671135/89425377 根据fsl_flexcan.h文件从文件末尾往前面梳理,总共30个基础CAN函数; 该文章只梳理常规CAN,增强型CAN后面再单独梳理。 使用的是RT1064开发板进行测试。 11、轮询接收CAN FIFO消息 函 数 :status_t FLEXCAN_

NXP RT1060学习总结 - fsl_flexcan 基础CAN函数说明 -1
根据fsl_flexcan.h文件从文件末尾往前面梳理,总共30个基础CAN函数; 该文章只梳理常规CAN,增强型CAN后面再单独梳理。 使用的是RT1064开发板进行测试。 1、FlexCAN IRQ句柄函数 函 数 :void FLEXCAN_TransferHandleIRQ(CAN_Type *base, flexcan_handle_t *handle); 说 明 :这个函数处理Fl
NXP RT1060学习总结 - CANFD功能
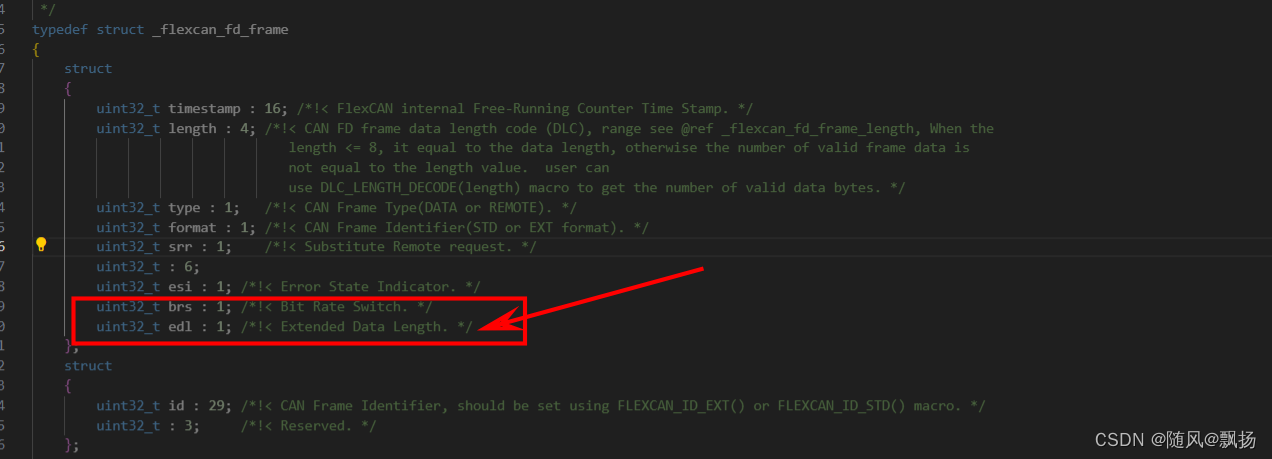
1、RT1060-CAN FD功能简介 这里使用RT1060系列的1064芯片进行开发,测试板是官方提供的开发板;RT1060系列支持3路CAN功能,CAN1和CAN2只能最为普通的CAN外设,支持CAN2.0,而CAN3支持CAN-FD功能;CAN-FD功能这里就不做详细介绍,百度上很多该方面资料,核心点是普通CAN只能传输8字节数据,而CAN-FD最大支持传输64字节数据。 注意事项:使用C
NXP RT1060学习总结 - 基础CAN功能
1、RT1060-CAN功能简介 这里使用的是RT1060系列的1064芯片进行开发,使用的是官方提供的开发板;提供的CAN外设为CAN2,使用CAN2的好处是IO与CAN3可以互相映射,而CAN3是具备CAN-FD功能。 2、CAN IO初始化 static void can2_gpio_config(void){//设置GPIO的始终CLOCK_EnableClock(kCLOCK_I
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 3 “编译 NXP i.MX RT1060”( 完 )
此章节叙述如何修改、建构 i.MX RT1060 的 Sample Code“aws_remote_control_wifi_nxp” 1. 点击“Import SDK example(s)” 2. 选择“MIMXRT1062xxxxA”>“evkmimxrt1060”,并确认 SDK 版本后,点击“Next>” 3. 选择“aws_examples”>“aws_remot
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 2 “架构 AWS”
接续上一章节,我们把开发环境架设好之后,此章节叙述如何建立 AWS IoT 环境,请务必已经有 AWS Account,申请 AWS Account 之流程将不在此说明。 III-1. 登入AWS IoT, 在“管理”>“所有装置”>“实物”下点击“建立实物” III-2. 选择“建立单一实物”后,点击“下一步” III-3. 输入实物名称,在此取名为“AWSTEST”
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 1 “建立开发环境”
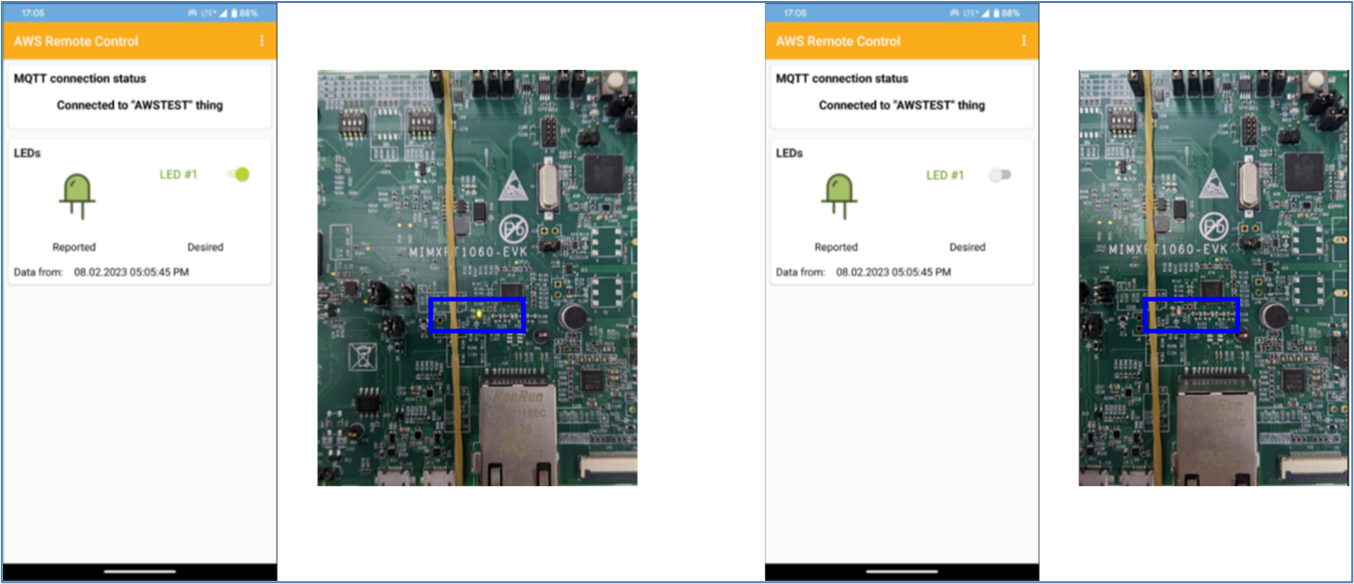
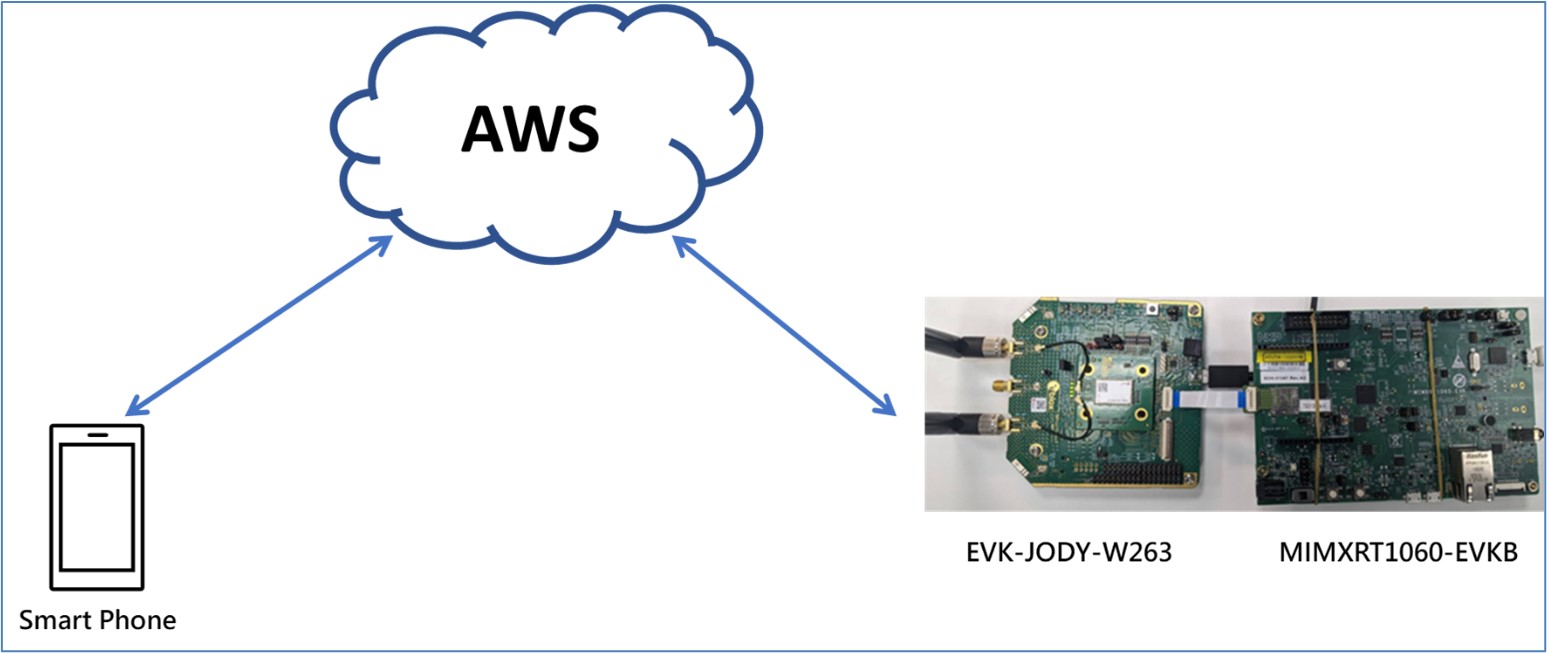
这个系列的文章将叙述如何借由 NXP 的“evkmimxrt1060_aws_remote_control_wifi_nxp”这支 Sample Code,达到 NXP RT1060EVK 经由 U-Blox EVK-JODY-W263 将资讯传到 AWS 上,并可借由手机对 RT1060 EVK 的 LED 进行远端控制。 整体架构如下图所示: 这篇文章将介绍所需的软硬体,以及如何