本文主要是介绍NXP RT1060学习总结 - CANFD功能,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、RT1060-CAN FD功能简介
这里使用RT1060系列的1064芯片进行开发,测试板是官方提供的开发板;RT1060系列支持3路CAN功能,CAN1和CAN2只能最为普通的CAN外设,支持CAN2.0,而CAN3支持CAN-FD功能;CAN-FD功能这里就不做详细介绍,百度上很多该方面资料,核心点是普通CAN只能传输8字节数据,而CAN-FD最大支持传输64字节数据。
注意事项:使用CANFD功能的时候,用于测试的CAN工具需要支持CANFD功能。
2、各类宏定义和全局变量
#define EXAMPLE_CAN CAN3 //使用的CAN外设 - CAN3
#define RX_MESSAGE_BUFFER_NUM (10) //接收邮箱
#define TX_MESSAGE_BUFFER_NUM (9) //发送邮箱#define EXAMPLE_CAN_CLK_SOURCE (kFLEXCAN_ClkSrc1) //CAN时钟/* 选择60M时钟除以USB1 PLL (480mhz)作为flexcan主时钟源 */
#define FLEXCAN_CLOCK_SOURCE_SELECT (0U)
/* Clock divider for master flexcan clock source */
#define FLEXCAN_CLOCK_SOURCE_DIVIDER (2U)#define DLC (15)
#define BYTES_IN_MB kFLEXCAN_64BperMB //每个消息区选择64字节数据
#define EXAMPLE_CAN_CLK_FREQ ((CLOCK_GetFreq(kCLOCK_Usb1PllClk) / 8) / (FLEXCAN_CLOCK_SOURCE_DIVIDER + 1U)) //时钟频率flexcan_handle_t flexcanHandle;
volatile bool txComplete = false; //发送完成标志
volatile bool rxComplete = false; //接收完成标志
volatile bool wakenUp = false; //唤醒标识
flexcan_mb_transfer_t txXfer, rxXfer; //邮箱
flexcan_fd_frame_t frame;uint32_t txIdentifier; //收发ID标识符
uint32_t rxIdentifier;uint16_t t_Count = 0; //用于测试
3、CAN FD IO初始化
static void can2_gpio_config(void)
{//设置GPIO的时钟CLOCK_EnableClock(kCLOCK_Iomuxc);//配置IO的复用模式 设置为CAN3的TX和RX功能IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_14_FLEXCAN3_TX, 1U); IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_15_FLEXCAN3_RX, 1U);//配置GPIO功能IOMUXC_SetPinConfig(IOMUXC_GPIO_AD_B0_14_FLEXCAN3_TX, 0x10B0U); IOMUXC_SetPinConfig(IOMUXC_GPIO_AD_B0_15_FLEXCAN3_RX, 0x10B0U);
}
4、CAN FD功能配置
void can2_function_config(void)
{flexcan_config_t flexcanConfig; //CAN配置flexcan_rx_mb_config_t mbConfig; //接收邮箱配置flexcan_timing_config_t timing_config; //时间配置/* FLEXCAN时钟配置 */CLOCK_SetMux(kCLOCK_CanMux, FLEXCAN_CLOCK_SOURCE_SELECT);CLOCK_SetDiv(kCLOCK_CanDiv, FLEXCAN_CLOCK_SOURCE_DIVIDER);/* 设置发送和接收的帧ID */txIdentifier = 0x321;rxIdentifier = 0x123;/* Get FlexCAN module default Configuration. *//** flexcanConfig.clkSrc = kFLEXCAN_ClkSrc0;* flexcanConfig.bitRate = 1000000U;* flexcanConfig.bitRateFD = 2000000U;* flexcanConfig.maxMbNum = 16;* flexcanConfig.enableLoopBack = false;* flexcanConfig.enableSelfWakeup = false;* flexcanConfig.enableIndividMask = false;* flexcanConfig.disableSelfReception = false;* flexcanConfig.enableListenOnlyMode = false;* flexcanConfig.enableDoze = false;*/FLEXCAN_GetDefaultConfig(&flexcanConfig);flexcanConfig.clkSrc = EXAMPLE_CAN_CLK_SOURCE;flexcanConfig.bitRate = 500000U; //这里使用的是**bitRate**,bit位的波特率memset(&timing_config, 0, sizeof(flexcan_timing_config_t));if (FLEXCAN_FDCalculateImprovedTimingValues(EXAMPLE_CAN, flexcanConfig.bitRate, flexcanConfig.bitRateFD,EXAMPLE_CAN_CLK_FREQ, &timing_config)){/* 更新修改后的定时配置 */memcpy(&(flexcanConfig.timingConfig), &timing_config, sizeof(flexcan_timing_config_t));}FLEXCAN_FDInit(EXAMPLE_CAN, &flexcanConfig, EXAMPLE_CAN_CLK_FREQ, BYTES_IN_MB, true);/* 创建CAN句柄 并建立回调函数 */FLEXCAN_TransferCreateHandle(EXAMPLE_CAN, &flexcanHandle, flexcan_callback, NULL);/* 设置接收屏蔽机制 后面来仔细研究一下该屏蔽机制 */FLEXCAN_SetRxMbGlobalMask(EXAMPLE_CAN, FLEXCAN_RX_MB_STD_MASK(rxIdentifier, 0, 0));/* 设置接收消息缓存 */mbConfig.format = kFLEXCAN_FrameFormatStandard; //标准帧mbConfig.type = kFLEXCAN_FrameTypeData; //数据帧mbConfig.id = FLEXCAN_ID_STD(rxIdentifier); //设置帧IDFLEXCAN_SetFDRxMbConfig(EXAMPLE_CAN, RX_MESSAGE_BUFFER_NUM, &mbConfig, true);/* 设置发送消息缓存 */FLEXCAN_SetFDTxMbConfig(EXAMPLE_CAN, TX_MESSAGE_BUFFER_NUM, true);
}
流程与基础CAN功能类似,在波特率配置的时候使用的是bitRate ,这里需要注意以下;
从源码上看bitRate 和 baudRate的注释,好像也没有什么不同,如下图所示:(有了解的伙伴可以下面评论留言)
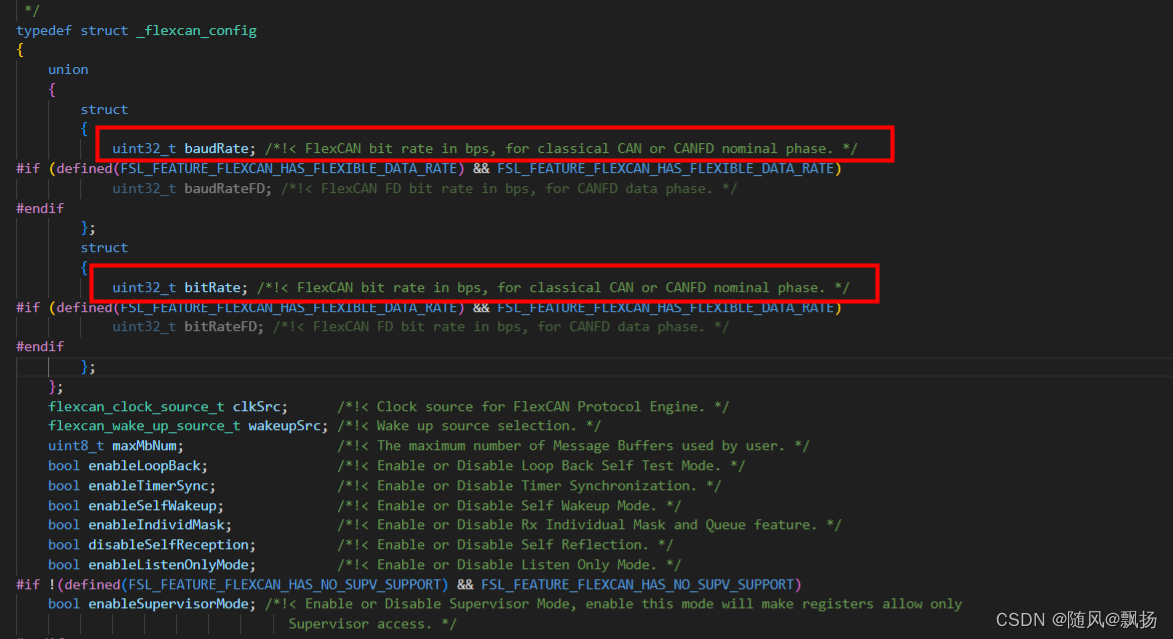
配置的接收是轮询接收,中断接收后面再测试一下,配合官方SDK的例程探索,难度不大。
这里还配置了一个回调函数,用于判断接收和发送是否完成。
5、CAN FD收发
//发送数据
void can2_send_data(void)
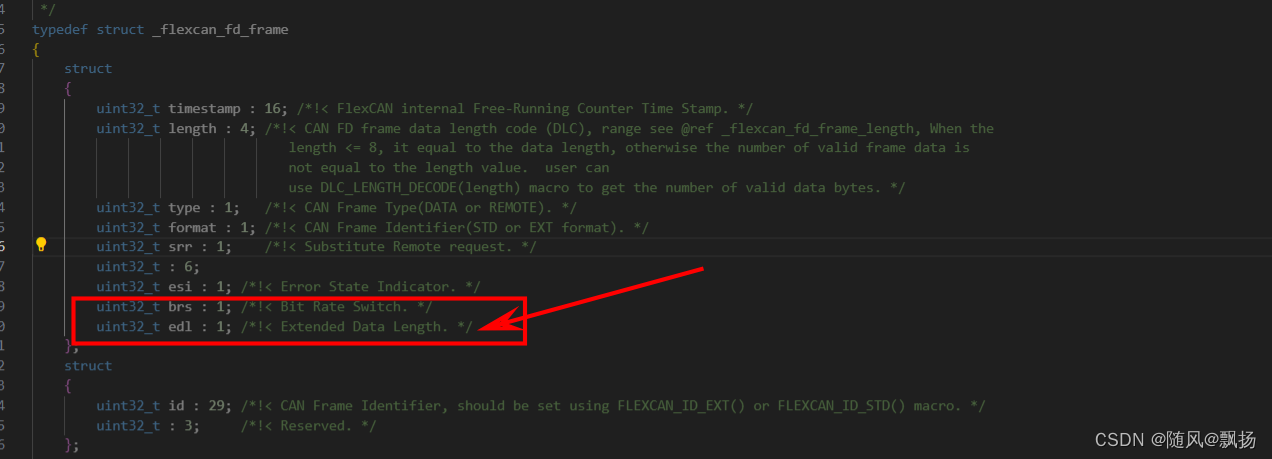
{frame.id = FLEXCAN_ID_STD(txIdentifier);frame.format = (uint8_t)kFLEXCAN_FrameFormatStandard;frame.type = (uint8_t)kFLEXCAN_FrameTypeData;frame.length = (uint8_t)DLC;frame.brs = 1U; //灵活的数据率格式与比特率开关frame.edl = 1U; //灵活的数据速率格式扩展数据长度frame.dataWord[0] = 0x12345678;frame.dataWord[2] = 0x12345678;frame.dataWord[15] = t_Count;txXfer.mbIdx = (uint8_t)TX_MESSAGE_BUFFER_NUM; //用于传输消息的消息缓冲区的索引。txXfer.framefd = &frame;(void)FLEXCAN_TransferFDSendNonBlocking(EXAMPLE_CAN, &flexcanHandle, &txXfer);//FLEXCAN_WriteFDTxMb(EXAMPLE_CAN, TX_MESSAGE_BUFFER_NUM, &frame);
}/*!* @brief FlexCAN Call Back function*/
static FLEXCAN_CALLBACK(flexcan_callback)
{switch (status){case kStatus_FLEXCAN_RxIdle:if (RX_MESSAGE_BUFFER_NUM == result){rxComplete = true;}break;case kStatus_FLEXCAN_TxIdle:if (TX_MESSAGE_BUFFER_NUM == result){txComplete = true;}break;case kStatus_FLEXCAN_WakeUp:wakenUp = true;break;default:break;}
}//轮询接收
void can2_receive_data(void)
{rxXfer.mbIdx = (uint8_t)RX_MESSAGE_BUFFER_NUM;rxXfer.framefd = &frame;//无阻塞接收 利用回调函数进行接收数据(void)FLEXCAN_TransferFDReceiveNonBlocking(EXAMPLE_CAN, &flexcanHandle, &rxXfer);if (rxComplete == true){t_Count++; rxComplete = false;}
}
这里的接收和发送有一个联动的功能,就是CAN FD接收到正确的帧ID后,会将t_Count++;,然后再发送的地方frame.dataWord[15] = t_Count;这样就可以检测这个CAN FD的发送后接收是否都正确。
另外需要注意的是,使用CAN FD一定需要将flexcan_fd_frame_t 中的brs 、edl 置1;
6、涉及的函数及标志位解释
6.1……
这篇关于NXP RT1060学习总结 - CANFD功能的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





