本文主要是介绍AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 3 “编译 NXP i.MX RT1060”( 完 ),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
此章节叙述如何修改、建构 i.MX RT1060 的 Sample Code“aws_remote_control_wifi_nxp”
1. 点击“Import SDK example(s)”

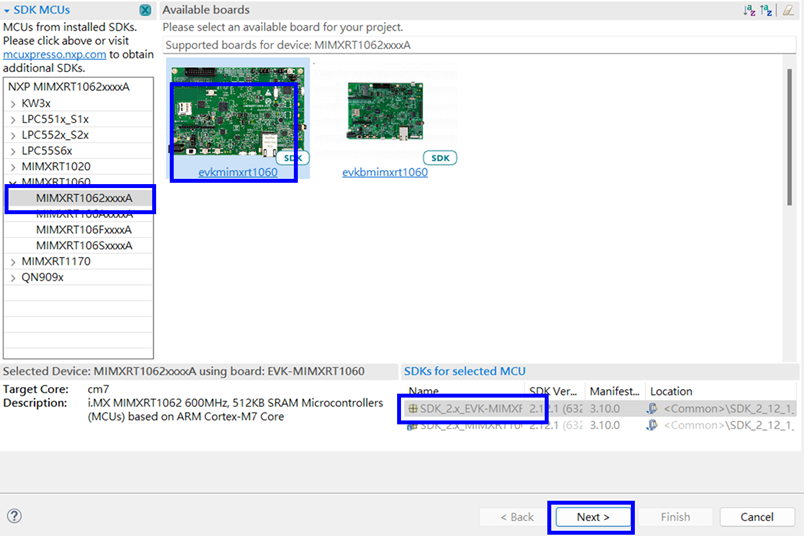
2. 选择“MIMXRT1062xxxxA”>“evkmimxrt1060”,并确认 SDK 版本后,点击“Next>”
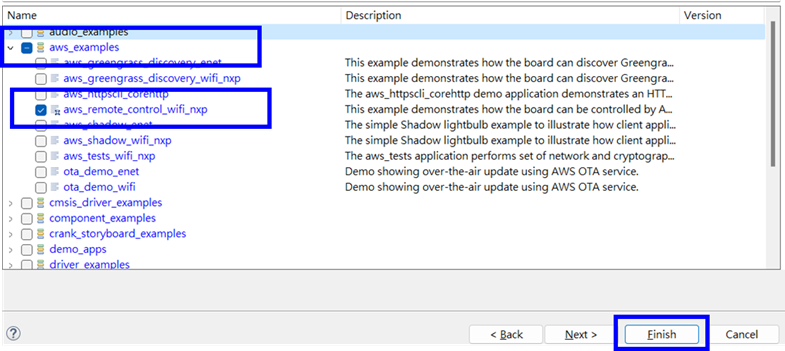
3. 选择“aws_examples”>“aws_remote_control_wifi_nxp”后,点击“Finish”
4. 于“souece\app_config.h”更改 Wi-Fi Module 定义为“WIFI_88W8987_BOARD_UBX_JODY_W2_USD”

5. 于“freertos\demos\include\aws_clientcredential.h”加入 “clientcredentialMQTT_BROKER_ENDPOINT”与“clientcredentialIOT_THING_NAME”

“clientcredentialMQTT_BROKER_ENDPOINT”就是一开始定义的实物名称
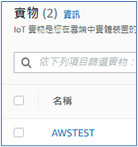
“clientcredentialIOT_THING_NAME”可在此实物里头的“Classic 阴影”中找到

6. 同样在“freertos\demos\include\aws_clientcredential.h”填入欲连线的“Wi-Fi SSID”及“Password”

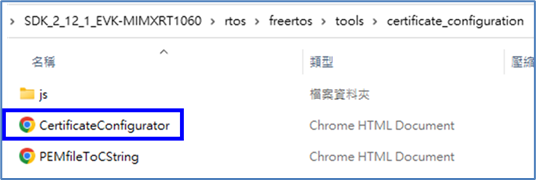
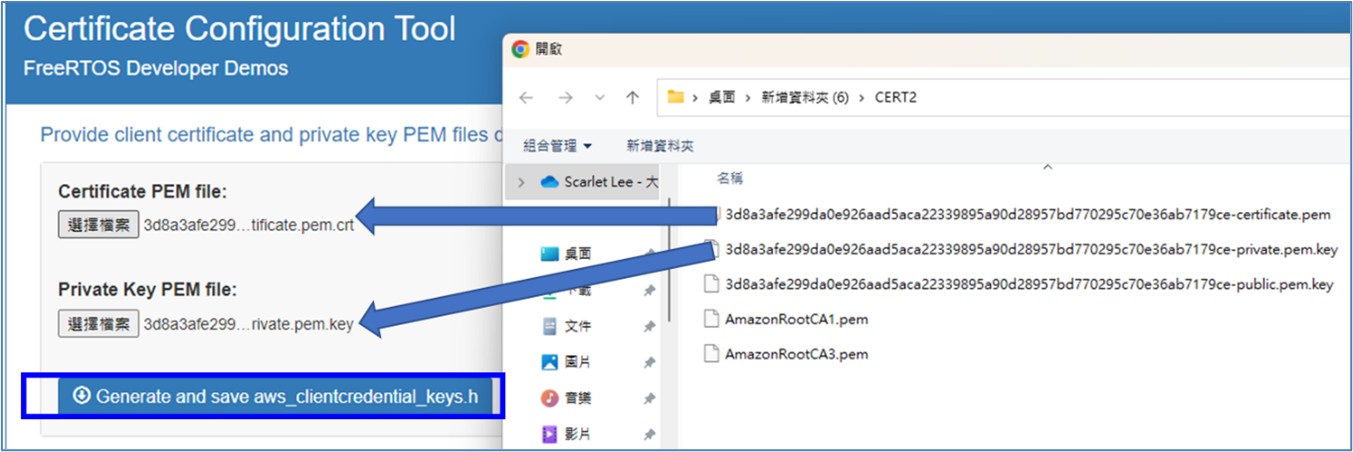
7. 开启 SDK 资料夹内的“CerticateConfigurator”,位在“SDK_2_12_1_EVK-MIMXRT1060\rtos\freertos\tools\certificate_configuration”
8. 放入对应的 Certificate PEM 与 Private Key PEM 档案后,点击“Generate and save aws_clientcredential_keys.h”,然后储存产生的档案
9. 将产生的“aws_clientcredential_keys.h”拖曳到专案中的“freertos\demos\indlude”,并覆盖原档案

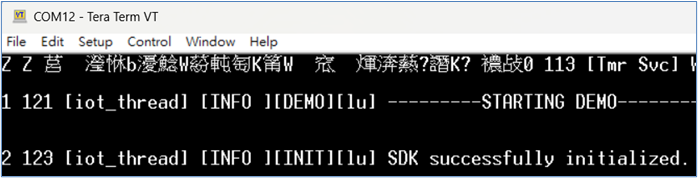
10. 烧录后,可以借由 Terminal 观察到停在 SDK successfully initialized,这是因为没有接上 Wi-Fi Module,所以还不会进行后续流程
11. 将 i.MX RT1060 EVK 断电,然后经由 SDIO 接上 U-Blox 的 EVK-JODY-W263,由于 EVK-JODY-W263 在接受 i.MX RT1060 download FW 时会需要 1A 的电,所以要接上 USB 供给额外的电流;另外,上电顺序要先从 EVK-JODY-W263,再换 i.MX RT1060 EVK

12. 至此开机后正确的 Log 如下,此时已经可以跟 AWS IoT 进行资讯交互
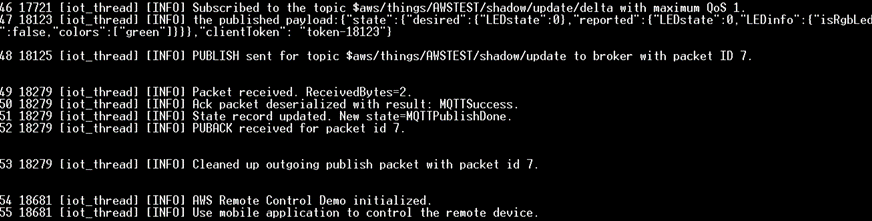
可以进行资讯交互后,就能在 AWS 网页上进行远端操作......但是这种呈现方式毕竟不够直观,所以我们可以透过 Android APP 做远端控制
以下将叙述如何透过 Android Smart Phone 经由 AWS IoT 对 NXP i.MX RT1060 EVK 上的 LED 进行控制
首先,在 SDK > boards > evkmimxrt1060 > aws_examples > remote_control_android 里头可以找到 Android APP 的 apk 与 propertis
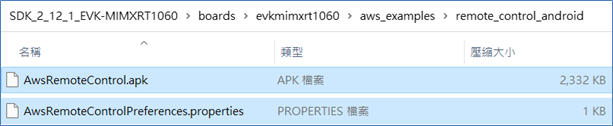
用记事本软体开启“AwsRemoteControlPreferences.properties”,并填入相关资讯

将 apk 与修改后的 properties 这两个档案放到 Android Smart Phone,然后安装“AwsRemoteControl.apk”,但仅支援 Android 5.1 以上 ( Android SDK 22 ) 的 Smart Phone
执行 AwsRemoteControl,并点击“●●●”>“Load preferences”后,选取传到手机的“AwsRemoteControlPreferences.properties”
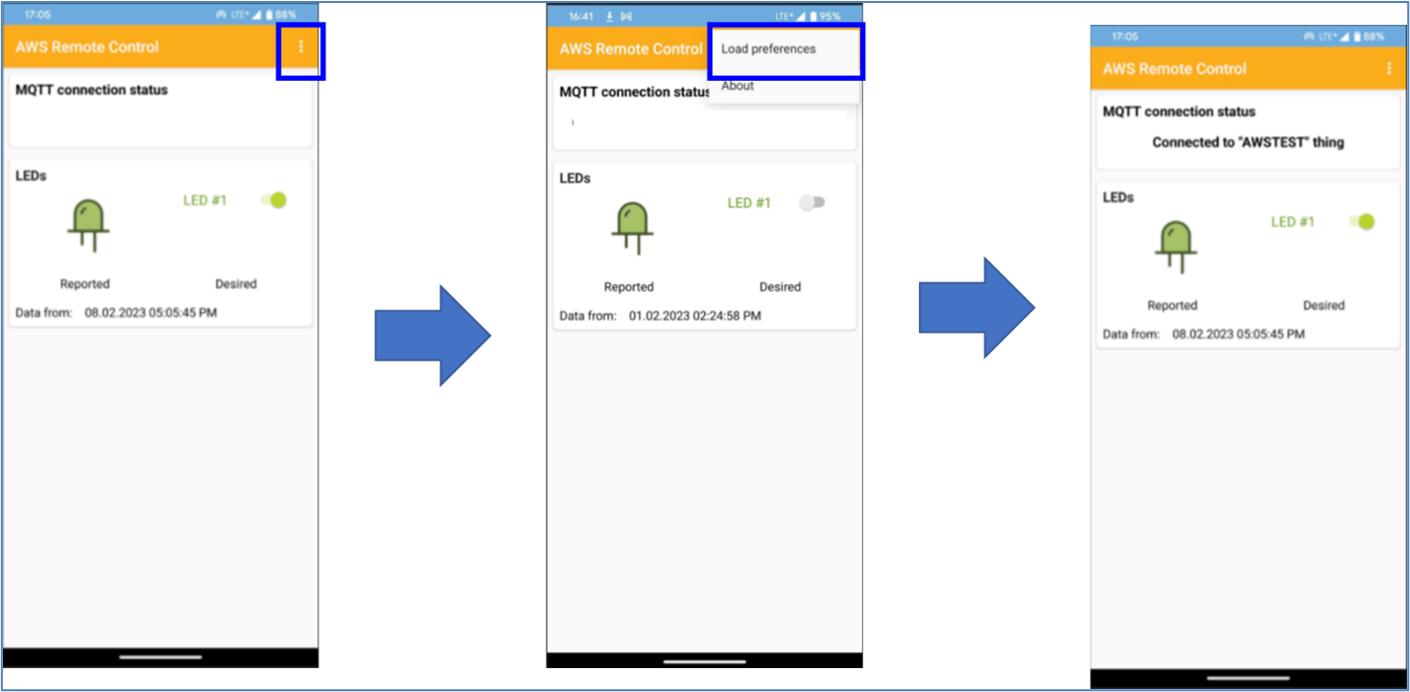
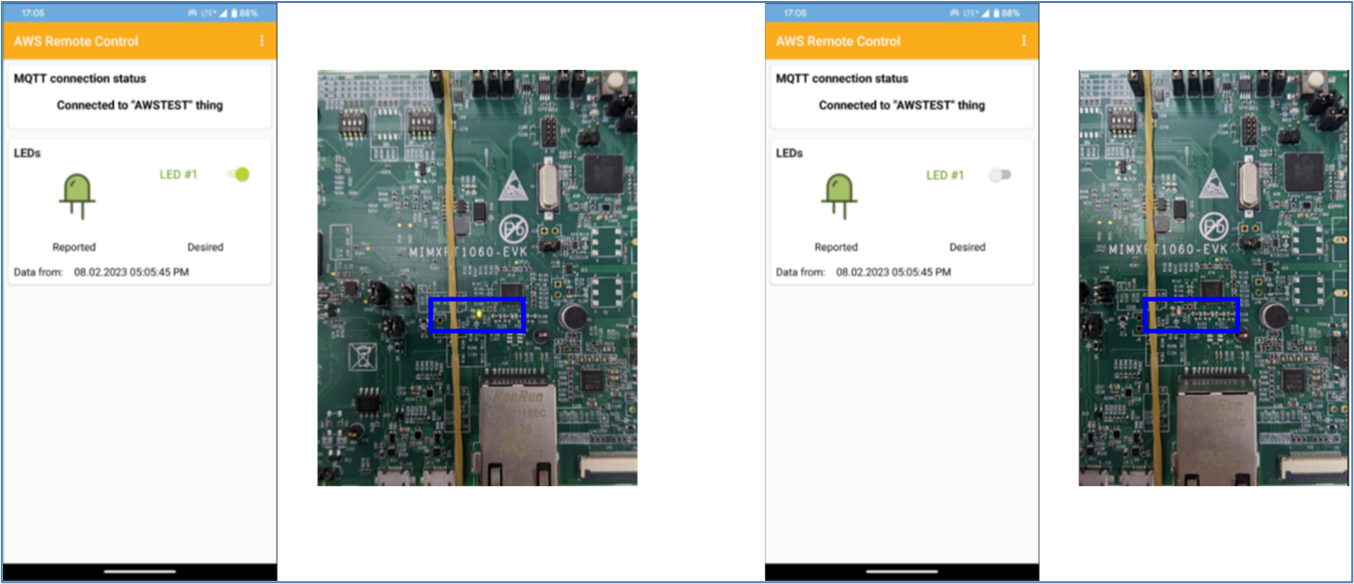
此时就可以透过 APP 上的 Icon 对 i.MX RT1060 EVK 进行控制
以上就是使用 NXP i.MX RT1060 EVK 连结 AWS 的 Demo 说明,至此完成了整个网路通讯的架构
► 相关视频
AWS Remote Control on NXP i.MX RT1060 EVK 的实机演示
AWS Remote Control on NXP i.MX
推荐阅读:
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 1 “建立开发环境”
AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 2 “架构 AWS”
这篇关于AWS Remote Control ( Wi-Fi ) on i.MX RT1060 EVK - 3 “编译 NXP i.MX RT1060”( 完 )的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







