rk3588专题
![[rk3588 ubuntu20.04]移植ROS2](/front/images/it_default.gif)
[rk3588 ubuntu20.04]移植ROS2
目录 1 使用命令行安装ROS2 1.1设置语言 1.2添加源 1.3安装ROS2 1.4设置环境变量 2 在编译源码阶段安装ROS2 2.1调整roofts.img大小 2.2 安装ROS2 3 ROS2功能测试 1 使用命令行安装ROS2 1.1设置语言 设置语言为UTF-8。 sudo apt update && sudo apt insta

将RK3588平台的TMC等USB function驱动挪出内核源码树
背景 前一段时间定位一个上位机通过USB-TMC连接下位机(基于RK3588平台)时界面发生卡顿的问题,发现USB-TMC驱动代码是放在内核源码树里跟内核一起编译的,觉着这样既不便于更换TMC 驱动版本(每次修改代码都要重编内核),也不便于将TMC驱动代码单独放到SVN管理(RK的build系统有16GB之巨,全部提交到SVN服务器吃不消),于是考虑将其挪到源码树外。 想参照自己之前在zynq

RK3588 13.0去掉SystemUI快速设置选项
Android13.0的SystemUI下拉菜单有很多快速设置选项,有些选项对我们设备来说是多余的,用户要求去掉无用的选项,只保留Internet Bluetooth Screen record 去掉之前: 去掉之后: 为了去掉这些快速设置选项,试了很多地方,研究了很多代码,最后发现改这个config文件就可以去掉了 diff --git a/core/res/res/
在国产芯片上实现YOLOv5/v8图像AI识别-【4.2】RK3588获取USB摄像头图像推流RTSP更多内容见视频
本专栏主要是提供一种国产化图像识别的解决方案,专栏中实现了YOLOv5/v8在国产化芯片上的使用部署,并可以实现网页端实时查看。根据自己的具体需求可以直接产品化部署使用。 B站配套视频:https://www.bilibili.com/video/BV1or421T74f 前言 在实际生产过程中,有很多时候不光是通过网络获取rtsp视频流,通常会采用在板子上插上USB摄像头获取画面。 今天

RK3588 NPU开发环境搭建
如何在Ubuntu系统(PC)上搭建RK3588 Buildroot Linux的NPU开发环境?即电脑端运行Ubuntu系统,而RK3588板卡运行Buildroot Linux系统的情况下,搭建RK3588 NPU开发环境。 下面是相应的步骤(对应的命令): 0.依赖文件 RKNPU2 工程下载地址:rknn-toolkit2/rknpu2 at master · airockc
瑞芯微RK3588 camera驱动总结三调试
一、指令 先介绍一些很有用的指令 1.media-ctl -p -d /dev/media0 用于打印 /dev/media0 设备的媒体管道拓扑结构。媒体管道拓扑结构描述了多媒体设备内部各组件之间的连接关系,包括视频输入、视频输出、编码器、解码器、ISP(图像信号处理器)等组件之间的连接。 media-ctl -d /dev/media1 -e "rkisp_selfpath" med
redroid rk3588折腾笔记
手头有一个nanoPC-t6的3588板卡,想试下搭建云手机。 资料收集: 编译适用于RK3588的Redroid镜像 https://www.cnblogs.com/FW-ltlly/p/18014692 香橙派5plus上跑云手机方案一 redroid(带硬件加速) 容器虚拟安卓 在rock5b上使用redroid 适用于RK3588的Redroid镜像,包含多种功能 拉人入坑之,在Linu

RK3588 系列之2—通过PC网络共享,连接开发板
RK3588 系列之2—通过PC网络共享,连接开发板 1.PC端配置1.1 已连接的网络开启共享1.2 配置共享给开发板的网络 2.开发板端配置2.1.配置 /etc/network/interfaces2.2.重启网络服务2.3.重启开发版,并进行测试 参考文献 通过PC将网络共享给RK3588开发板,使开发板可以和PC进行ssh连接,同时开发板也可以上网。 这里使用的PC为华

RK3588 系列之1—串口连接
RK3588 系列之1—串口连接 1.串口转USB芯片驱动2.使用MobaXterm进行串口链接3.注意事项 1.串口转USB芯片驱动 根据使用的芯片安装不同的驱动,常见的如CH340。装完驱动后,通过设备管理器,查看开发板与个人PC连接情况,记住占用的端口号,如COM3。 2.使用MobaXterm进行串口链接 新建一个session,配置以下参数,注意波特率也是很重要的
7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目

RKNPU2从入门到实践 --- 【10】RKNPU2零拷贝API实现RKNN模型在RK3588开发板上的部署
目录 一、为什么叫零拷贝API? 二、零拷贝API执行流程(代码解读) 2.1 前奏工作 2.2 main.cc文件的编写(代码的编写) 2.2.1 第一步:rknn_init接口创建rknn_context对象、加载RKNN模型 2.2.2 第二步:调用rknn query接口查询获取到模型输入输出属性、推理时间、SDK版本等信息 2.2.3 第三步:调用rknn_cre

RK3588!黑神话悟空,启动?-迅为电子RK3588开发板
《黑神话:悟空》是一款西游背景的动作角色扮演游戏,故事取材自中国古典神话小说《西游记》。玩家将扮演“天命人”,为了探寻昔日传说的真相而踏上这条千难万险的西行之路。作为国内首款3A大作,在20号发布之后,就引起了全球范围内的广泛关注和热议。 《黑神话:悟空》的游戏画面成功在iTOP-RK3588上进行了展示,而游科官方又提到:《黑神话:悟空》只能运行在X86平台上,那视频中的效果

RKNPU2从入门到实践 ---- 【8】借助 RKNN Toolkit lite2 在RK3588开发板上部署RKNN模型
前言 作者使用的平台为Ubuntu20.04虚拟系统,开发板为瑞芯微RK3588,开发板上的系统为Ubuntu22.04系统。 一、任务 完成RKNN模型的部署,RKNN模型的部署是将RKNN模型放到开发板上,应用程序可以加载RKNN模型,从而在嵌入式设备上完成推理计算的任务。 瑞芯微提供了两种嵌入式部署方式,一种是使用RKNPU2 SDK的C接口进行部

AI嵌入式RK3588人工智能开发 --- 【2】RKNPU软件推理框架
一、RKNPU推理软件框架 1.1 推理软件框架 (1)RKNPU 硬件层 关于 RKNPU 硬件层在上个博文【AI嵌入式人工智能开发 --- 【1】初始RKNPU-CSDN博客】已经进行了了解,这里就不再进行过多的赘述。(2)RKNPU 驱动层 RKNPU 的驱动层是连接上层应用和 RKNPU 硬件的桥梁。驱动层的主要作用是将应用程序需要推理的内容提交给 RKNPU 进行计算,

RK3588人工智能开发----【1】初识NPU
NPU 的诞生! 随着人工智能和大数据时代的到来,传统嵌入式处理器中的CPU和GPU逐渐无法满足日益增长的深度学习需求。为了应对这一挑战,在一些高端处理器中,NPU(神经网络处理单元)也被集成到了处理器里。NPU的出现不仅减轻了CPU和GPU的负担,还让复杂的计算任务得以高效处理。在典型的工作流中,CPU会首先接收任务,并根据任务的性质将其分配给合适的处理单元,图像处理任务由GPU处
5 自研rk3566/rk3588+rgbd相机之v4l2-rgb出图框架开发二
自研rk3566/rk3588+rgbd相机之v4l2出图框架开发二 1 v4l2框架介绍打开视频设备文件节点初始化视频设备:启动视频采集:停止视频采集:关闭视频设备节点: 2 linux-v4l2 rgb-sensor出图格式配置配置脚本如下:v4l2-sc2310-cap.sh配置脚本如下:v4l2-gc2093-cap.sh配置脚本如下:v4l2-gc2053-cap.sh 3 lin

基于RK3588的多摄像头车辆与车道线检测系统(基于rk3588的车辆和车道线检测,可以带四个720p的摄像头,2个1080p的摄像头)
硬件配置: 处理器:Rockchip RK3588,这是一款高性能的嵌入式处理器,支持多路高清视频输入和处理。摄像头配置: 4个720p(1280x720)分辨率的摄像头2个1080p(1920x1080)分辨率的摄像头 软件环境: 操作系统:Linux发行版,如Ubuntu开发语言:C++/Python框架:OpenCV用于图像处理,TensorFlow或PyTorch用于深度学习模型

RK3588 技术分享 | 在Android系统中使用NPU实现Yolov5分类检测-迅为电子
随着人工智能和大数据时代的到来,传统嵌入式处理器中的CPU和GPU逐渐无法满足日益增长的深度学习需求。为了应对这一挑战,在一些高端处理器中,NPU(神经网络处理单元)也被集成到了处理器里。NPU的出现不仅减轻了CPU和GPU的负担,还让复杂的计算任务得以高效处理。在典型的工作流中,CPU会首先接收任务,并根据任务的性质将其分配给合适的处理单元,图像处理任务由GPU处理,

记录:Rk3588播放RTSP视频流有延时和卡顿(CPU性能问题)
前言 前段时间做项目,花了几天时间开发了一款基于RK3588平台,进行RTSP和RTP的解码软件,接收其他软件发送的UDP控制指令,进行位置、大小、显示的前后顺序、播放链接、参数等动态调整,使用QT+Gstreamer框架开发。 管道:rtspsrc location=rtsp://admin@passpwd:192.9.200.113 port-range=10000-100
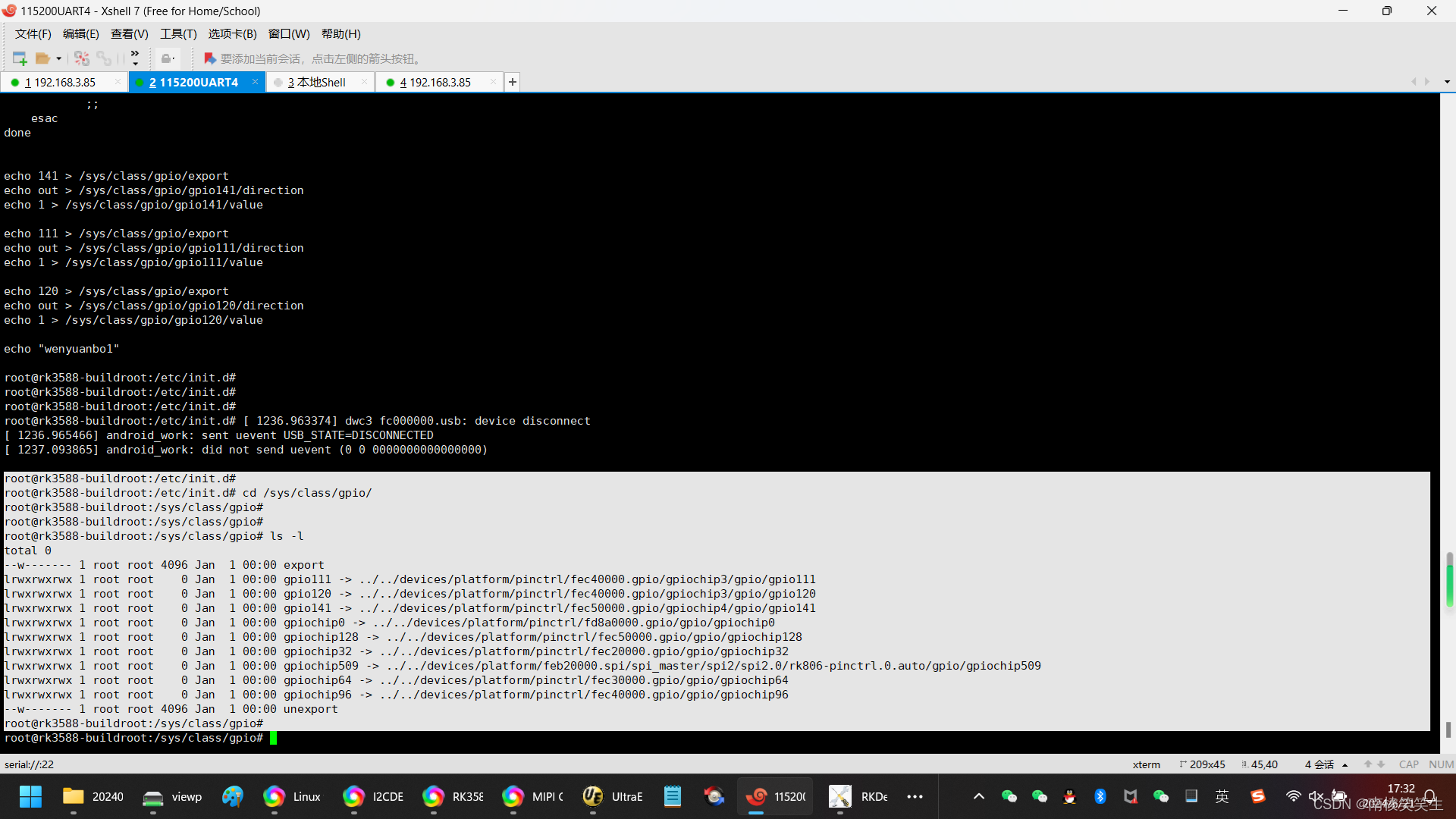
20240621将需要自启动的部分放到RK3588平台的Buildroot系统的rcS文件中
20240621将需要自启动的部分放到RK3588平台的Buildroot系统的rcS文件中 2024/6/21 17:15 开发板:飞凌OK3588-C SDK:Rockchip原厂的Buildroot 缘起:在凌OK3588-C的LINUX R4系统启动的时候,需要拉高GPIO4_B5、GPIO3_B7和GPIO3_D0。 LVDS12V_EN GPIO4_B5 32*4+

RK3588 代码中导入torch报错
RK3588 代码中导入torch报错 使用RK3588测试官方的YOLOv8,出现下面的问题 发现是dfl函数中导入torch的时候产生的,但是我在python终端上执行导入torch并没有发生报错 Traceback (most recent call last):File "infer.py", line 243, in <module>boxes, classes, scores

【RK3588/算能/Nvidia智能盒子】挑战「无电无网」部署AI算法,守护大亚湾荃美石化码头工地安全
“万顷碧波之上,一座千米钢栈桥如蛟龙出水,向大海蜿蜒。钢栈桥上的项目建设者正在加紧作业,为助推惠州大亚湾加快建设成为世界级绿色石化基地全力奋战。”这是不久前北京日报对大亚湾惠州港荃湾港区荃美石化码头工地的描述。 △ 图片来源于北京日报 荃美石化是世界最大的石油天然气生产商埃克森美孚的全资子公司。据报道,该码头项目将服务于大亚湾石化区油品、化学品等大宗商品和原材料大进大出需求。 作

rk3588 rkllm 安装部署
这是测试版本。 下载转换工具 $ git clone https://github.com/airockchip/rknn-llm.git 安装转换环境 遵循此文档在PC Linux上安装Conda。 https://conda.io/projects/conda/en/stable/user-guide/install/linux.html 创建conda $ conda crea

PCIe总线-RK3588 PCIe子系统简介(八)
1.PCIe子系统 RK3588 PCIe子系统如下图所示。总共拥有5个PCIe控制器。PCIe30X4(4L)支持RC和EP模式,其他4个仅支持RC模式。ITS port 1连接PCIe30X4(4L)和PCIe30X2(2L)控制器,PCIe30X4(4L)和PCIe30X2(2L)控制器使用PCIe3.0 PIPE PHY。ITS port 0连接PCIe30X1_0(1L0)、PCIe3
YOLOv10在RK3588上的测试(进行中...)
1.代码源 国内镜像站在gitcode。这个镜像站也基本上包含了github上常用项目的镜像。然后它的主发布源在这里: GitCode - 全球开发者的开源社区,开源代码托管平台 yolov10是清华主导做的... 然后,在维护列表里看到了这个: 2024年05月31日:感谢kaylorchen整合rk3588! 2.三方性能评价 kaylorchen的yolo
RK3588开发笔记-100M网口自协商成1000M网口
目录 前言 一、问题描述 二、原理图连接 三、解决方法 总结 前言 在进行RK3588开发过程中,遇到一个令人困惑的问题:在使用RTL8211F-CG phy芯片出来的100M网口在自协商后连接速率变成了1000M。这篇博客将详细记录这个问题的产生、排查过程以及最终的解决方案,希望能对遇到相同问题的开发者有所帮助。 一、问题描述 在