real专题

UMI复现代码运行逻辑全流程(一)——eval_real.py(尚在更新)
一、文件夹功能解析 全文件夹如下 其中,核心文件作用为: diffusion_policy:扩散策略核心文件夹,包含了众多模型及基础库 example:标定及配置文件 scripts/scripts_real:测试脚本文件,区别在于前者倾向于单体运行,后者为整体运行 scripts_slam_pipeline:orb_slam3运行全部文件 umi:核心交互文件夹,作用在于构建真

DS简记1-Real-time Joint Object Detection and Semantic Segmentation Network for Automated Driving
创新点 1.更小的网络,更多的类别,更复杂的实验 2. 一体化 总结 终于看到一篇检测跟踪一体化的文章 网络结构如下: ResNet10是共享的Encoder,yolov2 是检测的Deconder,FCN8 是分割的Deconder。 其实很简单,论文作者也指出:Our work is closest to the recent MultiNet. We differ by focus

OpenAI Gym custom environment: Discrete observation space with real values
题意:OpenAI Gym 自定义环境:具有实数值的离散观测空间 问题背景: I would like to create custom openai gym environment that has discrete state space, but with float values. To be more precise, it should be a range of valu

(已开源-CVPR 2024)YOLO-World: Real-Time Open-Vocabulary Object Detection
169期《YOLO-World Real-Time Open-Vocabulary Object Detection》 You Only Look Once (YOLO) 系列检测模型是目前最常用的检测模型之一。然而,它们通常是在预先定义好的目标类别上进行训练,很大程度上限制了它们在开放场景中的可用性。为了解决这一限制,本文引入了 YOLO-World,通过视觉语言建模和大规模数

YOLO前篇---Real-Time Grasp Detection Using Convolutional Neural Networks
论文地址:https://arxiv.org/abs/1412.3128 1. 摘要 比目前最好的方法提高了14%的精度,在GPU上能达到13FPS 2. 基于神经网络的抓取检测 A 结构 使用AlexNet网络架构,5个卷积层+3个全连接层,卷积层有正则化和最大池化层网络结构示意图如下 B 直接回归抓取 最后一个全连接层输出6个神经元,前4个与位置和高度相关,另外2个用来表示方向

time 命令用法,注意在求进程实践的时候,real 时间长是因为i/o时间长
用途说明 time命令常用于测量一个命令的运行时间,注意不是用来显示和修改系统时间的(这是date命令干的事情)。但是今天我通过查看time命令的手册页,发现它能做的不仅仅是测量运行时间,还可以测量内存、I/O等的使用情况,手册页上的说法是time a simple command or give resource usage,其中time一词我认为它应该是测量或测定的意思,并不单指时间。一个程

【论文阅读】YOLOv10: Real-Time End-to-End Object Detection
文章目录 摘要一、介绍二、相关工作三、方法3.1无nms培训的一致性双重任务3.2 整体效率-精度驱动的模型设计 四、实验4.1实现细节4.2与最先进水平的比较4.3模型分析 五、结论 YOLOv10:实时端到端对象检测 摘要 在过去的几年里,由于在计算成本和检测性能之间取得了有效的平衡,YOLOs已经成为实时目标检测领域的主导范式。研究人员已经对yolo的架构设计、优化目

超分 Real-ESRGAN 使用笔记
效果图 目录 依赖项: 视频推理入口: 图片推理入口文件: RealESRGAN_x4plus 12g显存不够 RealESRGAN_x4plus_anime_6B 的效果 树枝之间产生了蒙版 RealESRNet_x4plus 有点模糊 2022年开源的 GitHub - xinntao/Real-ESRGAN: Real-ESRGAN aims at devel

Real-Time Rendering笔记 --------------------------------- 渲染管线
一. 渲染管线: 渲染管线是指渲染的基本流程或步骤,基本渲染管线分为三个阶段: 应用程序( 逻辑 ) ------> 几何( 坐标变化和光照流水线 T&L ) ------> 光栅化 1. 应用程序( 逻辑 ) 阶段: 进行的是逻辑处理 ( 如: 移动相机,改变粒子位置等。) 是在CPU中进行处理的。 2. 几何( 坐标变化和光
Object Detection -- 论文YOLO(You Only Look Once: Unified, Real-Time Object Detection)解读(链接)
https://blog.csdn.net/u011974639/article/details/78208773

【文献】3D Gaussian Splatting for Real-Time Radiance Field Rendering
论文地址:https://arxiv.org/abs/2308.04079 项目: https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/ 代码: git clone https://github.com/graphdeco-inria/gaussian-splatting —recursive 一、文章概述 1.问题

《You Only Look Once: Unified, Real-Time Object Detection》YOLO一种实时目标检测方法 阅读笔记(未完成版)
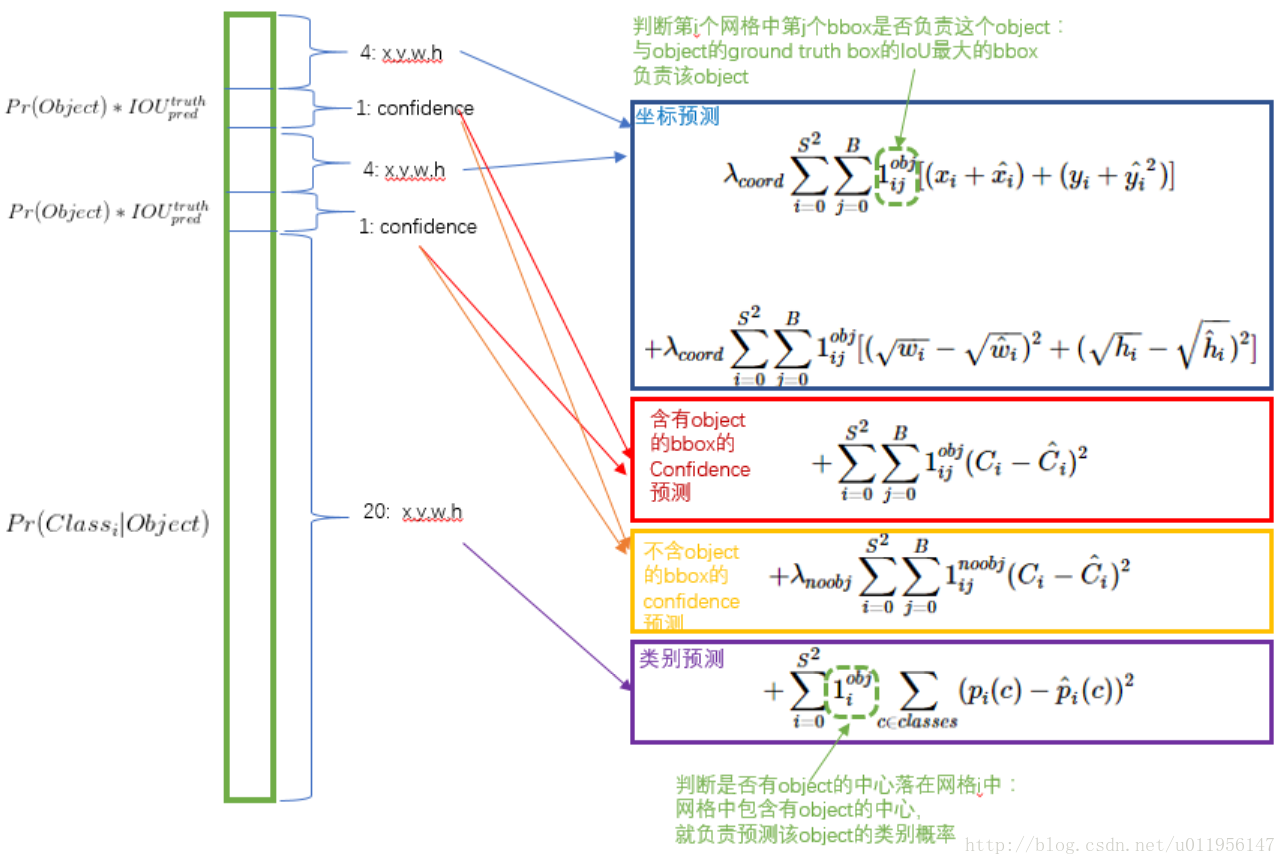
文章目录 1. one-stage与two-stage检测算法1. 模型过程1.1 grid cell1.2 bounding box与confidence score1.3 类别预测1.4 预测目标 2. 网络的学习2.1 网络输出的数据与预测集数据2.2 损失函数2.3 网络的设计 1. one-stage与two-stage检测算法 two-stage: one-st

论文阅读--Cross-view Transformers for real-time Map-view Semantic Segmentation
一种新的2D维度的bev特征提取方案,其通过引入相机先验信息(相机内参和外参)构建了一个多视图交叉注意力机制,能够将多视图特征映射为BEV特征。 cross view attention:BEV位置编码+由根据相机标定结果(内参和外参)演算得到的相机位置编码+多视图特征做attention得到 整体上文章的网络前端使用CNN作为特征抽取网络,中端使用CNN多级特征作为输入在多视图下优化BEV特

实时语义分割--ICNet for Real-Time Semantic Segmentation on High-Resolution Images
github代码:https://github.com/hszhao/ICNet 语义分割算法精度和速度对比: 由图可以看出,ResNet38,PSPNet,DUC精度虽然较高,但是无法速度相对较慢,无法达到实时,ENet速度较快,但精度较低,而本文算法既可以达到实时,精度也相对较高. Speed Analysis PSPNet50的处理不同大小的输入图像所需时间: 图中,sta
YOLO: Real-Time Object Detection解读
YOLO不同于RCNN系列分为region proposal和classification,YOLO是直接输出box位置和box所属的类别,整张图都是网络的输入,是个回归问题。 YOLO的主要特点: 速度快,能够达到实时的要求。在 Titan X 的 GPU 上 能够达到 45 帧每秒。使用全图作为 Context 信息,背景错误(把背景错认为物体)比较少。泛化能力强。在自然图像上训练好的

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),

论文阅读笔记——StereoNet: Guided Hierarchical Renement for Real-Time Edge-Aware Depth Prediction
引言: 谷歌实时端到端双目系统深度学习网络 双目匹配可以得到环境中的三维深度信息,进而为机器人,无人车,VR等现实场景下的应用提供有力信息,在对安全验证比较高的人脸支付领域,三维人脸验证也正在逐渐取代安全性较低的二维人脸验证。近年来,深度学习双目系统匹配已经取得了很不错的进展,很多先进的网络性能已经超过传统方法。然而,深度学习双目系统匹配仍然在实用方面面临很多问题,其中一个问题便是无法做到推断

【语义分割】——又快又强:Deep Dual-resolution Networks for Real-time and Accurate Semantic Segmentation of Road
出处:哈尔滨工业大学 论文 code:暂未开源 关键词: 实时语义分割 语义分割是自动驾驶汽车了解周围场景的关键技术,对于实际的自动驾驶汽车来说,为了获得高精度的分割结果而花费大量的推理时间是不可取的。使用轻量级架构(编码器解码器或two-pathway)或推理在低分辨率图像。本文提出的模型在单张2080ti上DDRNet-slim能打到77.4% mIoU和230FPS,DDRNet
O2O : Finetuning Offline World Models in the Real World
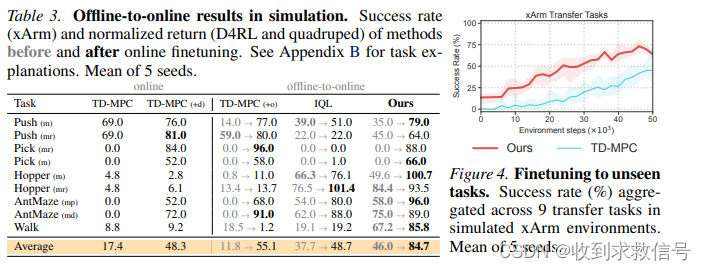
CoRL 2023 Oral paper code Intro 算法基于TD-MPC,利用离线数据训练世界模型,然后在线融合基于集成Q的不确定性估计实现Planning。得到的在线数据将联合离线数据共同训练目标策略。 Method TD-MPC TD-MPC由五部分构成: 状态特征提取 z = h θ ( s ) z = h_\theta(s) z=hθ(s)隐动力学模型 z ′
【3d】Real-Time Rendering 3rd 笔记2: 图形处理器
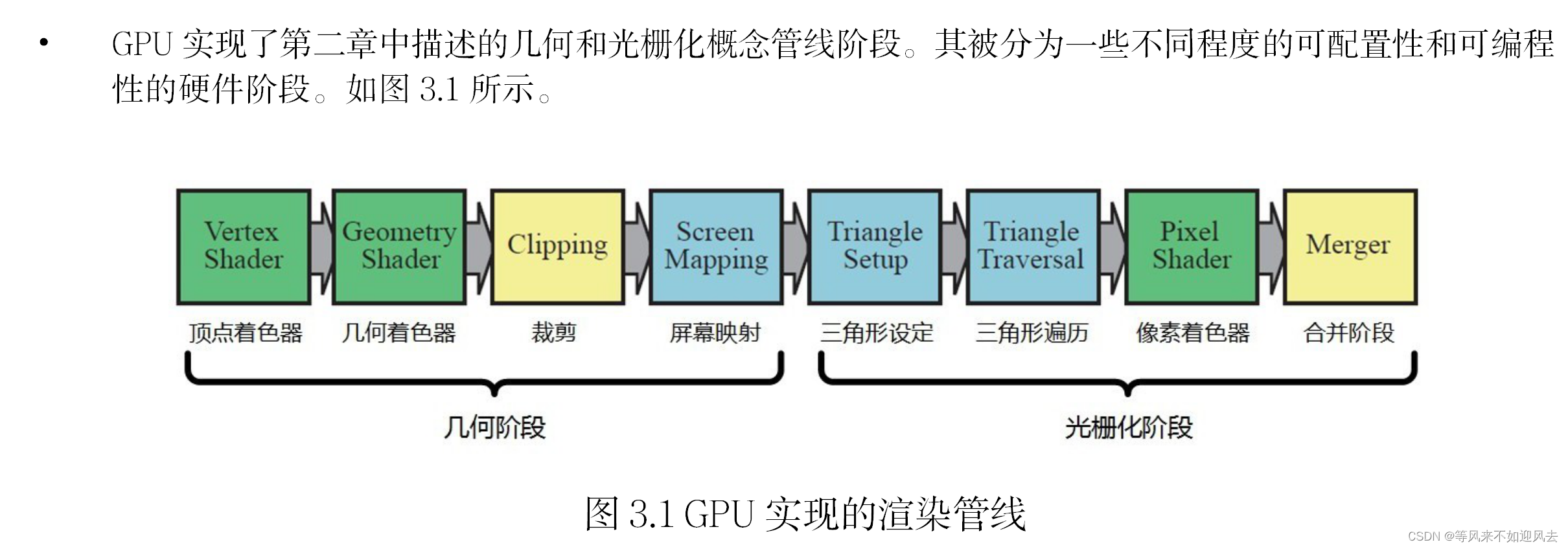
Chapter 3 The Graphics Processing Unit 图形处理器 图元(点、线、三角形) GPU渲染管线 ?绿色的阶段都是完全可编程的。 ?黄色的阶段可配置,但不可编程。 ?蓝色的阶段完全固定。 GPU实现的渲染管线 ?一个绘制调用(也就是喜闻乐见的 Draw Call)会调用图形 API 来绘制一系列的图元,会驱使图形管线的运行。 ?每个可编程着

How to record real IP of user on nginx?
应用(Docker)使用WAF接入internet,nginx log 查不到用户的真实IP地址,于是修改nginx 设置,以下都是在linux下操作: 由于没有WAF权限,所以在 docker上启动了两个container,一个模拟WAF(r-proxy),一个模拟应用(webapp)。 docker上如何启动container,查看另一篇文章:How to start a docker c
前端性能监控:从Lighthouse到Real User Monitoring
前端性能监控是确保Web应用程序提供良好用户体验的关键组成部分。Lighthouse 和 Real User Monitoring (RUM) 是两种不同的工具和技术,它们关注的焦点不同,但都对优化前端性能至关重要。 2500G计算机入门到高级架构师开发资料超级大礼包免费送! Lighthouse Lighthouse 是一个自动化工具,主要用于离线评估网页性能和质量。它通过模拟真实用户的行
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks论文笔记
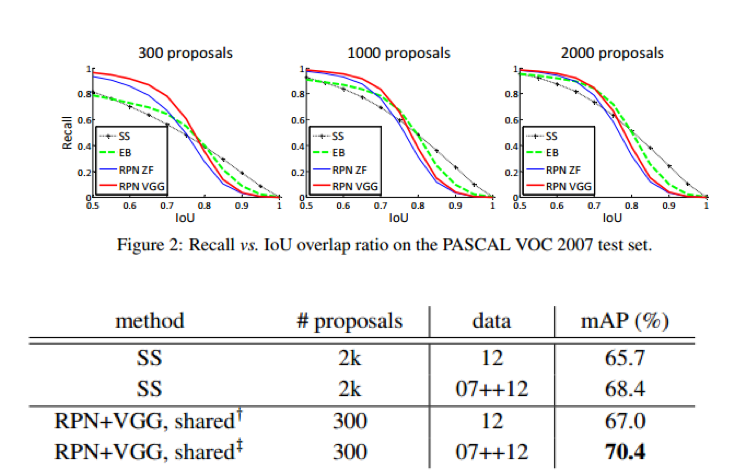
http://blog.csdn.net/bailufeiyan/article/details/50575150(感谢大神们) Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 这篇文章讲述了 Faster R-CNN,介绍了 RPN、Translation-Invaria

跟TED演讲学英文:Teachers need real feedback by Bill Gates
Teachers need real feedback Link: https://www.ted.com/talks/bill_gates_teachers_need_real_feedback Speaker: Bill Gates Date: May 2013 文章目录 Teachers need real feedbackIntroductionVocabularyTra

从数据类型varchar转换为real时出错
前一段时间在维护组织委项目,丁组长说给分配一个“简单”的任务。 组织委县市区成绩管理模块报黄页:从数据类型varchar转换为real时出错。看起来这个问题挺好解决的吧,其实也不难关键是找到问题的关键。通过逐步调试,在县市区成绩管理页面查看详情时发现得分一栏显示: 查看数据库发现得分的字段为varchar类型, 存放的数据类型与数据库中的类型不一致一般都会

【真实世界图像超分】《Frequency Consistent Adaptation for Real World Super Resolution》2012 Nanjing University
摘要:最近的基于深度学习的超分方法在已知退化核图像上已经展现出卓越的性能。但是这些方法往往在真实世界场景下表现不尽如人意,因为作为训练样本的LR图像通常来自于理想退化核(bicubic下采样),它们不同于真实源图像域。训练样本的LR图像和真实源图像的领域差异在频率密度上被明显观察到。这一点启示我们显示地缩小由不正确的退化造成的领域差异。我们设计了一个频率一致性模块,确保在真实世界场景应用已经存在的