pyramid专题

Segmentation简记2-RESIDUAL PYRAMID FCN FOR ROBUST FOLLICLE SEGMENTATION
创新点 与resnet结合,五层/level的分割由此带来的梯度更新问题,设计了两种方案。 总结 有点意思。看图吧,很明了。 细节图: 全流程图: 实验 Res-Seg-Net-horz: 在UNet上堆叠5个细节图中的结构,没有上采样层。 Res-Seg-Net-non-fixed: 普通方式的更新 Res-Seg-Net-fixed: 每一层的更新,只依据距离它最近的一

PSMNet:Pyramid Stereo Matching Network学习测试笔记04-特征提取部分前向传播
写在前面的话: 2019年9月21日18:56:48好久没回来更新博客了。因为在实习中,实习的新问题一大堆,并且实习的工作内容整理了也是发在公司内网wiki,外面是不可能发的(专业,有节操)。周末再做做毕业论文相关的工作。 写在前面的话2: 2019年09月28日18:02:55补充说明:CSDN博客发布版权更新,如果您看了博客并且用到PSMNet相关东西,请注明引用原作者的文章: @inpr

PSMNet:Pyramid Stereo Matching Network学习测试笔记03-如何训练网络
写在前面的话: 2019年09月28日18:02:55补充说明:CSDN博客发布版权更新,如果您看了博客并且用到PSMNet相关东西,请注明引用原作者的文章: @inproceedings{chang2018pyramid, title={Pyramid Stereo Matching Network}, author={Chang, Jia-Ren and Chen, Yong-Sheng}

Pyramid学习笔记
Pyramid学习笔记 Static Assets: static assets 指那些非Python原文件,如:图片、css、js、还有目录(没有__init__.py文件的目录)以及Mako或Chamelon模板文件。 ####理解asset规范: render_to_response('myapp:templates/some_template.pt', {}, request)

图片Gaussian pyramid(一)
简介 偶然在一个网页上发现一个Python图像处理的方法,能够进行图片的缩放。首先进行了高斯滤波,当缩放到小于30×30时break。 helpers: # import the necessary packagesfrom skimage.transform import pyramid_gaussianimport cv2from PIL import Imageimage = I
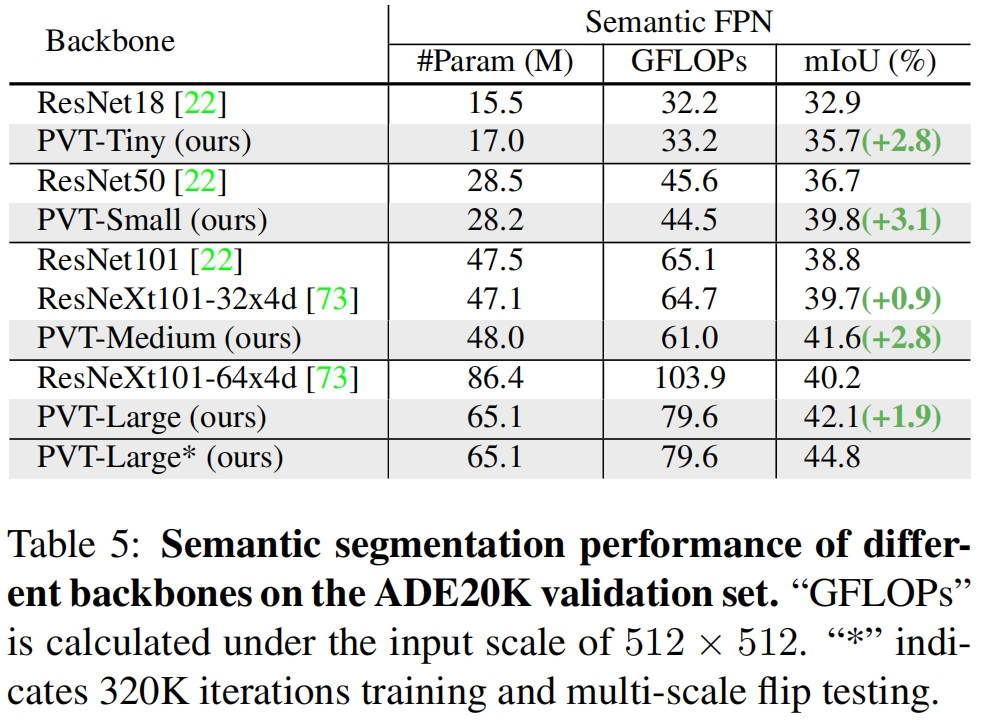
Pyramid Vision Transformer, PVT(ICCV 2021)原理与代码解读
paper:Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions official implementation:GitHub - whai362/PVT: Official implementation of PVT series 存在的问题 现有的 Vision
HDU 2446 Shell Pyramid
题目链接~~> 做题感悟:这种题以前做过类似的题,但是在做这题时一直超内存,真心无语,后来才发现开一个数组就 ok了我傻傻的开了两个怪不得呢 ! 做完之后百度了一下原来还有更简单的方法不用开数组就可以了。 解题思路:1 ) 开数组。可以先打个表,把到前 i 个的和存到 f [ i ] 中,这样就可以用二分查找到 s 处于第几堆,然后再用一次二分查找在第几层。
Pyramid match kernel and spatial pyramid matching
1.Pyramid match kernel Pyramid match kernel是一种利用直方图交的结果进行计算的一种核函数。 给定一个集合的集合X,其中的每个集合由一些d维特征向量构成。假设这些向量在一个D半径球内,且向量之间的最小的距离为 d√2 \frac{\sqrt{d}} { 2}(这可以通过缩放得到,为什么要这个假设,因为这样的话只要直方图bins的间距小于等于1/2就可

【YOLO改进】换遍MMDET主干网络之Pyramid Vision Transformerv2(PVTv2)(基于MMYOLO)
Pyramid Vision Transformer v2(PVTv2) Pyramid Vision Transformer v2(PVTv2)是在PVTv1的基础上进行改进的一种深度学习模型,它同样结合了Transformer架构和金字塔结构,旨在提供更强大的特征表示和更好的性能。 PVTv2的主要改进包括: 降低计算复杂度:通过引入线性复杂度注意层(Linear Complexity

【光流评估】《Optical Flow Estimation using a Spatial Pyramid Network》2016 Tubingen, Germany
摘要:我们通过结合深度学习和经典空间金字塔结构的方式来计算光流。通过使用每个金字塔级别的光流评估warp图像和更新光流,这种方法以一个粗到精的方式评估图像中的大运动。不同于在每个金字塔层级最小化对象函数。我们在每个层级训练网络,以计算光流更新。不像最近的FlowNet光流网络,本网络不需要处理大运动,由网络中的金字塔层级处理大运动。这有几个优点:(1)在模型参数上我们的SpyNet更简单,比Flo
Python pyramid如何使用
Pyramid是一个灵活的Python Web框架,它由Chris McDonough和Agiliq Consulting开发。Pyramid遵循WSGI(Web Server Gateway Interface)规范,允许开发者以最小的开始快速构建Web应用,同时提供了丰富的扩展性。 以下是使用Pyramid的基本步骤: 1. 安装Pyramid 首先,你需要安装Pyramid。使用pip

FPN(Feature Pyramid Network)详解
文章涉及个人理解部分,可能有不准确的地方,敬请指正 0. 概述 FPN,全名Feature Pyramid Networks,中文称为特征金字塔网络。它是2017年cvpr上提出的一种网络,主要解决的是目标检测中的多尺度问题。FPN通过简单的网络连接改变,在基本不增加原有模型计算量的情况下,大幅度提升了小物体检测的性能。 1. 产生动机 目标检测领域中,多尺度检测一直是个挑战,特别是小目标

医疗图像分割 | 基于Pyramid-Vision-Transformer算法实现医疗息肉分割
项目应用场景 面向医疗图像息肉分割场景,项目采用 Pytorch + Pyramid-Vision-Transformer 深度学习算法来实现。 项目效果 项目细节 ==> 具体参见项目 README.md (1) 模型架构 (2) 项目依赖,包括 python 3.8、pytorch 1.7.1、torchvision 0.8.2(3) 下载处理好的数据集,下载预训练权重

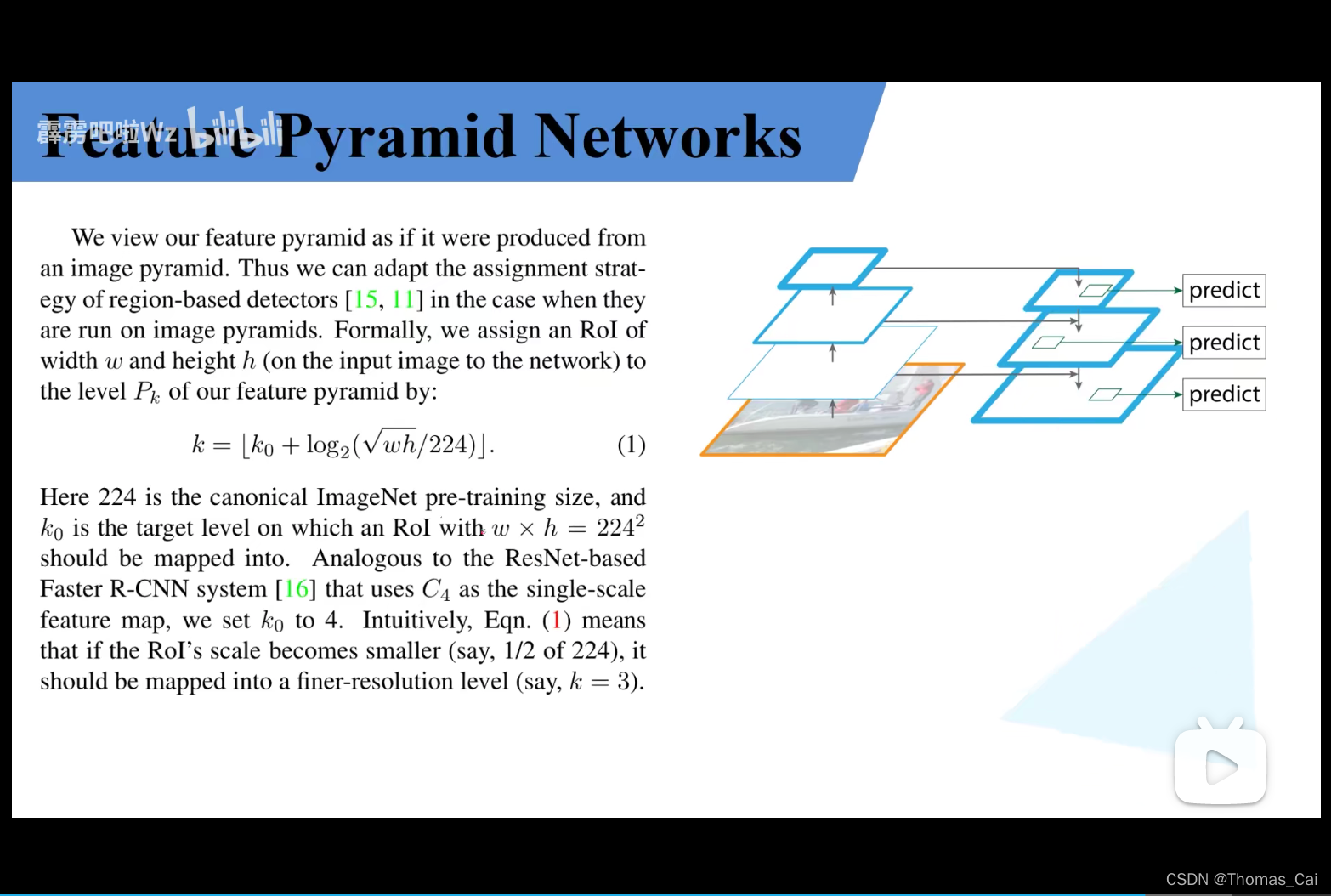
Feature Pyramid Networks for Object Detection 学习笔记
Feature Pyramid Networks for Object Detection 学习笔记 技术小白一枚,这是我的第一遍学习笔记,主要是为了记录自己看过的论文记录。。不是为了分享给大佬们看的,写的不好的地方请大佬们谅解 本篇论文主要包含以下几个部分: 摘要简介FPN结构介绍应用实验 摘要 利用固有的多规模,金字塔层的深层卷积网络,以边缘切割为代价来构造特征金字塔网络,在to
opencv 的pyramid down函数verilog实现
实现opencv如下的函数,在pyramid lk算法中用到,其他地方也有用得到,单独拿出来。 代码共享在github: https://github.com/tishi43/pyr_down template<class CastOp, class VecOp> voidpyrDown_( const Mat& _src, Mat& _dst, int borderType ){c

OpenCV pyramid lk(Lucas Kanade)光流算法自己的一些注释
参考如下: 代码注释的一个参考文章 https://blog.csdn.net/findgeneralgirl/article/details/107919541 原理参考文章 https://blog.csdn.net/qq_41368247/article/details/82562165 https://blog.csdn.net/sgfmby1994/article/details
FPN(Feature Pyramid Networks)讲解笔记
1. FPN(Feature Pyramid Networks) 1.1 视频链接 https://www.bilibili.com/video/BV1dh411U7D9?p=1&share_medium=android&share_plat=android&share_source=COPY&share_tag=s_i×tamp=1619145936&unique_k=Qhn6xA

【论文快读】Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
链接:https://arxiv.org/abs/1406.4729 作者:Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun 摘要: SPP可以用于: 1.大幅提高各种cnn的性能: 现有网络对输入图片的size要求一定,这种“人工设定”可能对accuracy造成影响。本文提出的SPP-net则是“input size/scale free”的
芒果YOLOv8改进116:即插即用:集中特征金字塔Centralized Feature Pyramid 高效涨点改进
💡🚀🚀🚀本博客 改进源代码改进 适用于 YOLOv8 按步骤操作运行改进后的代码即可 该专栏完整目录链接: 芒果YOLOv8深度改进教程 🚀🚀🚀 文章目录 一、Centralized Feature Pyramid论文理论部分 + YOLOv8代码改进论文创新论文贡献论文网络部分实验对比2. YOLOv8 核心代码改进部分2.1 核心新增代码2.2 代码修改部分 2.3 Y

第二十八回 施恩重霸孟州道 武松醉打蒋门神-可用于生产环境的Python Web框架:Pyramid
施恩给武松讲了他的烦心事,他在快活林的酒肉店被蒋门神霸占了。希望武松能帮他出气。施恩的父亲也从屏风后走出来,让施恩拜武松为兄长。 武松要去打蒋门神,跟施恩约好了“无三不过望”,望子就是酒旗,意思看到酒旗就要喝三碗。这一路十多家酒店,武松就喝了四十来碗酒,有那三五分酒劲,装作十分醉了,走路东倒西歪的,来到蒋门神酒店前。 武松让蒋门神初到孟州新娶的妾陪酒,激怒了她并把她和伙计们都打了,然后武
Parallel Feature Pyramid Network for ObjectDetection
ECCV18 现在主流的一些检测方法通常使用一个网络来 生成通道数递增的特征,如SSD, 但是这样不同层语义信息差距较大, 会限制检测精度, 尤其是对小目标检测。 作者认为相较于提升深度, 提升网络的宽度更有效。 首先使用SPP(spatial pyramid pooling) 来生成不同分辨率的特征, 这些特征是并行生成的,可以认为这些不同尺寸的特征之间有相似的语义信息。 然后我们resiz
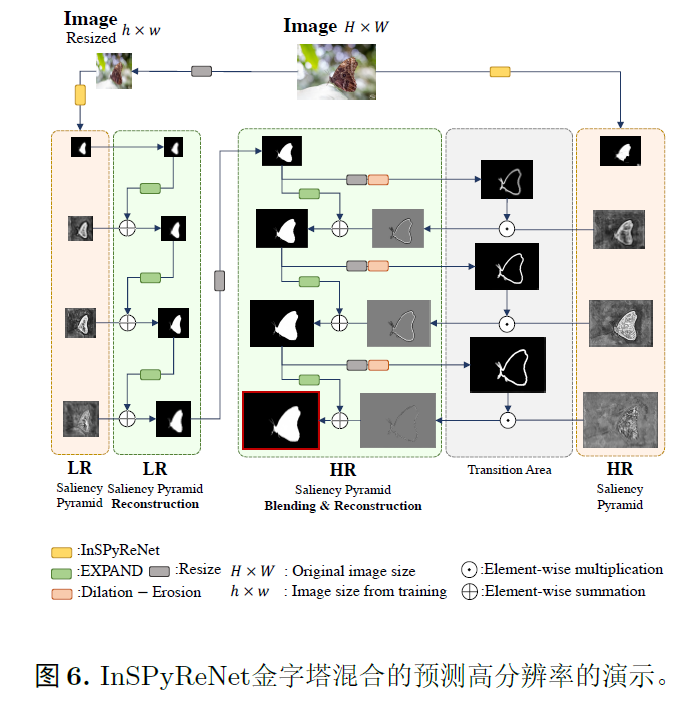
Revisiting image pyramid structure for high resolution salient object detection
accv2022的技术,在我测评的数据集上确实要明显好于basnet,rembg等一众方法。 1.Introduction 使用LR数据集训练的方法通过调整输入尺寸可以在HR图像上产生不错的结果。本文主要关注仅使用LR数据集进行训练以产生高质量的HR预测。HR的有效感受野ERFs和LR图像不同。设计了逆显著性金字塔重建网络InSPyReNet,InSPyReNet来直接生成Im
多尺度R-CNN论文笔记(6): Feature Pyramid Networks for Object Detection
前言:博主目前的研究课题为“可见光遥感图像目标检测”,研究兴趣是大尺寸高分辨率遥感图像上多尺度目标及小物体检测。为了整理阅读过的文献,梳理研究思路,记录自己的理解感悟,遂开启一个“物体检测系列博客”。 R-CNN系列综述及阅读笔记主要梳理R-CNN的思想及研究进展,细分为概述性文章和论文阅读笔记。 转载请注明文章出处: 论文多尺度R-CNN论文笔记(6): Feature
Agisoft Photoscan 正射校正提示“Can‘t write pyramid data”
1.问题描述 2.问题原因 查看文件计算路径,应该是因为硬盘空间不足的原因。 *.files文件下面查看计算文件 600多张照片,数据量比较大。 腾出更大空间重新进行计算。
AtCoder Beginner Contest 336 D - Pyramid
题目链接 题意:就是给你一个长为n的序列,让你通过两种不限次数的操作 使其变为金字塔序列,(a1<a2<ak>ak-1>ak-2...>an) 两种操作分别是1:让任何一个数减一;2:去掉队头队尾 其实我们想这和最长连续上升(下降)有点关系, dp[ i ]表示以i为结尾的最长上升长度 我们求出每个数的左右 最长连续序列即可 对于操作一其实没有什么影响,就相当于我们的常规的最长连续子序
Atcoder beginner contest 336 -- D -- Pyramid
目录 D -- Pyramid: 题目大意: 思路解析: 代码实现: D -- Pyramid: 题目大意: 给你一个长度为n的数组,你可以对这个数组进行以下操作。 操作1:选择任意一个元素,使其值大小减一。 操作2:删除第一个或者最后一个元素。 在进行有限次操作后,一定可以得到一个形如1 2 3 2 1这样的数字金字塔,问这个长度为n的数组能得到最长的数字金字塔的