proposal专题

Detection简记3-Region Proposal by Guided Anchoring
创新点 1.新的anchor 分布策略:Guided Anchoring 2.feature adaption module,根据潜在的anchor精调特征 总结 Guided Anchoring:流程如图所示 特征图F1接两个分支:位置预测分支产生物体可能存在的位置的概率图,形状预测分支预测物体的形状,独立于位置。根据两个分支的输出,得到anchor。 位置预测分支: 1X1的卷积+si

CV-笔记-重读Faster R-CNN即region proposal network(RPN)区域建议网络
目录 RPN region proposal networkanchor参数量 正负样本选择RPN的损失函数训练RPN实现细节整体的网络结构就是这样 Faster R-CNN主要是讲区域建议网络,而ROI pooling部分还是在Fast R-CNN里面介绍的。 RPN region proposal network 利用网络产生region proposal(区域建立,候

论文笔记 HyperNet: Towards Accurate Region Proposal Generation and Joint Object Detection
提出的HyperNet网络基于设计的Hyper特征,这种特征主要先集合分等级的特征图,然后将其压缩到一个空间。这种Hyper特征同时具有足够深和很好的语义信息,在PASCAL VOC 2007和2012上可以通过每张图产生仅仅100个proposal,而达到很好的精度和效果,同时可以达到实时,GPU下 5 fps的速度。 Hyper方法主要的贡献有: (1)在仅仅 50 proposal情况下
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks论文笔记
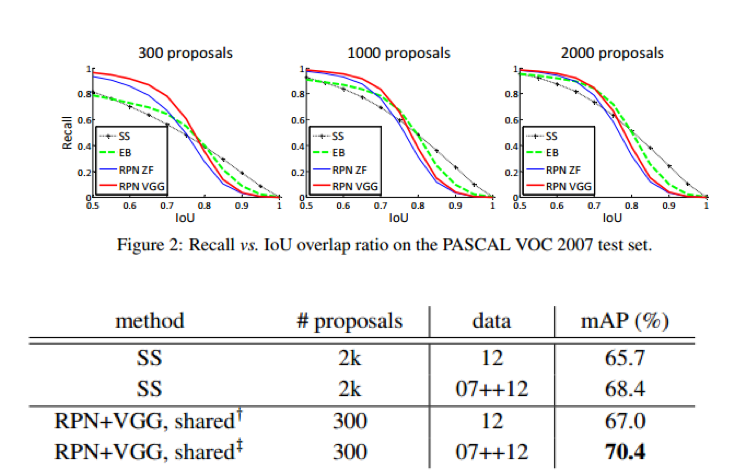
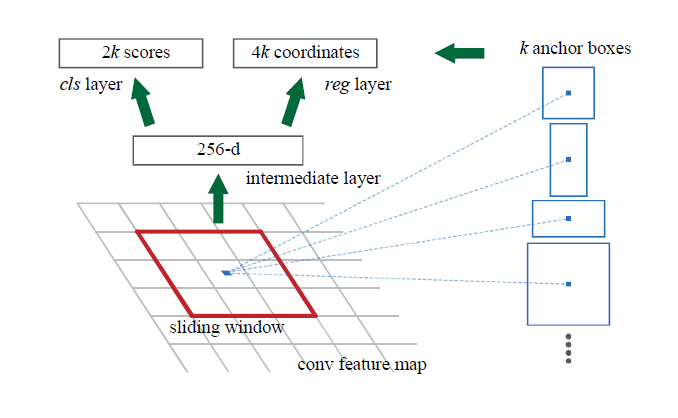
http://blog.csdn.net/bailufeiyan/article/details/50575150(感谢大神们) Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 这篇文章讲述了 Faster R-CNN,介绍了 RPN、Translation-Invaria

HDU 4020 Ads Proposal 简单的模拟
题意:给你n个广告商,他们有一些广告,每个广告都有相应的点击率和长度,现在为你每个广告商的点击率排名前k个的广告的和。 想法:数据不能每查询一次就找一次,那样必定超时,所以在查询之前要进行预处理。 #include<iostream>#include<cstring>#include<cstdio>#include<algorithm>using namespace s

点云分割中Proposal-based Methods与Proposal-free Methods
在三维点云实例分割过程中的研究主要包括两种方法:一种是需要对象检测模块( object detection module )的基于区域提案的方法(Proposal-based methods),另一种是不需要对象检测模块的不基于区域提案的方法(Proposal-free Methods) Region Proposal-based Methods 基于候选区域 这种方法首先产生一些可能包含物体

Faster RCNN源码解读3.3-_region_proposal() 筛选anchors-_proposal_target_layer()(核心和关键2)
Faster RCNN复现 Faster RCNN源码解读1-整体流程和各个子流程梳理 Faster RCNN源码解读2-_anchor_component()为图像建立anchors(核心和关键1) Faster RCNN源码解读3.1-_region_proposal() 筛选anchors-_proposal_layer()(核心和关键2) Faster RCNN源码解读3.2
Faster RCNN源码解读3.2-_region_proposal()筛选anchors-_anchor_target_layer()(核心和关键2)
Faster RCNN复现 Faster RCNN源码解读1-整体流程和各个子流程梳理 Faster RCNN源码解读2-_anchor_component()为图像建立anchors(核心和关键1) Faster RCNN源码解读3.1-_region_proposal() 筛选anchors-_proposal_layer()(核心和关键2) Faster RCNN源码解读3.2

TSI: Temporal Scale Invariant Network for Action Proposal Generation论文阅读笔记
论文地址:ACCV_2020_paper.pdf Abstract 简单介绍了本文贡献,当前SOTA的方法对短动作检测的准确率很低。本文是第一个分析了样本不均衡问题,并设计了一种新的尺度不变的损失函数来缓解短动作学习不够的问题。为了进一步实现提案生成任务,作者还采用了边界评价和提案完整性回归的pipline。 Introduction 作者发现,在时序动作检测中,在完整性预测中容易遗漏较短
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks----论文笔记
一、为什么提出Faster R-CNN Faster R-CNN的前身Fast R-CNN能达到实时检测,如果不考虑它用selective search计算region proposal所花时间的话。为此作者提出了Region Proposal Network(RPN),该深度网络通过共享卷积网络,使计算region proposal的时间几乎可以忽略不计(10 ms/图)! 二、Faster

3.4 无proposal检测方法(3): SSD: Single Shot MultiBox Detector
前言:博主目前的研究课题为“可见光遥感图像目标检测”,研究兴趣是大尺寸高分辨率遥感图像上多尺度目标及小物体检测。为了整理阅读过的文献,梳理研究思路,记录自己的理解感悟,遂开启一个“物体检测系列博客”。 R-CNN系列综述及阅读笔记主要梳理R-CNN的思想及研究进展,细分为概述性文章和论文阅读笔记。 转载请注明文章出处: SSD: Single Shot MultiBox
3.3 无proposal检测方法(2): G-CNN: an Iterative Grid Based Object Detector
前言:博主目前的研究课题为“可见光遥感图像目标检测”,研究兴趣是大尺寸高分辨率遥感图像上多尺度目标及小物体检测。为了整理阅读过的文献,梳理研究思路,记录自己的理解感悟,遂开启一个“物体检测系列博客”。 R-CNN系列综述及阅读笔记主要梳理R-CNN的思想及研究进展,细分为概述性文章和论文阅读笔记。 转载请注明文章出处: 论文G-CNN: an Iterative Grid
3.2 无proposal检测方法(1): You Only Look Once: Unified, Real-Time Object Detection
前言:博主目前的研究课题为“可见光遥感图像目标检测”,研究兴趣是大尺寸高分辨率遥感图像上多尺度目标及小物体检测。为了整理阅读过的文献,梳理研究思路,记录自己的理解感悟,遂开启一个“物体检测系列博客”。 R-CNN系列综述及阅读笔记主要梳理R-CNN的思想及研究进展,细分为概述性文章和论文阅读笔记。 转载请注明文章出处: 论文You Only Look Once: Unif
3.1 无proposal,基于回归的检测算法概述
前言:博主目前的研究课题为“可见光遥感图像目标检测”,研究兴趣是大尺寸高分辨率遥感图像上多尺度目标及小物体检测。为了整理阅读过的文献,梳理研究思路,记录自己的理解感悟,遂开启一个“物体检测系列博客”。 无proposal,基于回归的检测算法概述。本系列将介绍开创性工作YOLO与后续改进,以及G-CNN,SSD,YOLO V2等工作。 转载请注明文章出处: 无proposa

论文学习笔记(三) SGPN: Similarity Group Proposal Network for 3D Point Cloud Instance Segmentation
『写在前面』 无意间看到了《深度学习在点云分割中的应用》干货总结,原视频为SGPN原作者的技术分享,便搜来仔细研读一番~ SGPN是首个使用原始点云作为输入的实例分割网络,本篇blog为方便自己回忆要点用,建议参照原版paper使用。欢迎各位指正纰漏。 论文出处:CVPR 2018 作者机构:Weiyue Wang等,University of Southern California 原文链接:
【计算机视觉】Object Proposal之BING++
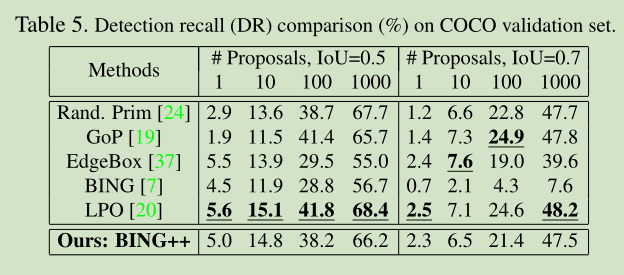
本文是对 BING 算法的升级,主要是在快的同时保持定位精度 两个 + 分别对应: edge-based recursive boxes as one “+”, and MTSE-based superpixel merging as the other “+” Object Detection Recall (DR):which is the ratio of the number o
Trans论文 | Proposal Learning用于半监督的目标检测
春暖 花开 今年的疫情给大家带来了很多的不便,但是我们“计算机视觉战队”依然坚守自己岗位,给关注我们的同学带来新的分享,今年我们大家一起加油!今天我们主要还是说一说目标检测的知识,这个框架主要来源于TRANS顶级期刊。 概要 这次分享的以半监督目标检测为研究对象,通过对有标签和无标签数据的训练,提高了基于候选的目标检测器(即two-stages目标检测器)的检测精度。然而,由于真值标签的不

Faster R-CNN: TowardsReal-Time Object Detection with Region Proposal Networks阅读笔记
Faster R-CNN: TowardsReal-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun 一、摘要 目前最好的目标检测网络都依赖region proposals算法来假设目标位置。比较好的例子,例如SPP-
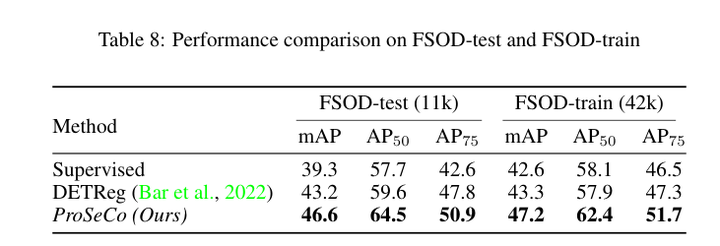
目标检测:Proposal-Contrastive Pretraining for Object Detection from Fewer Data
论文作者:Quentin Bouniot,Romaric Audigier,Angélique Loesch,Amaury Habrard 作者单位:Université Paris-Saclay; Université Jean Monnet Saint-Etienne; Universitaire de France (IUF) 论文链接:http://arxiv.org/ab
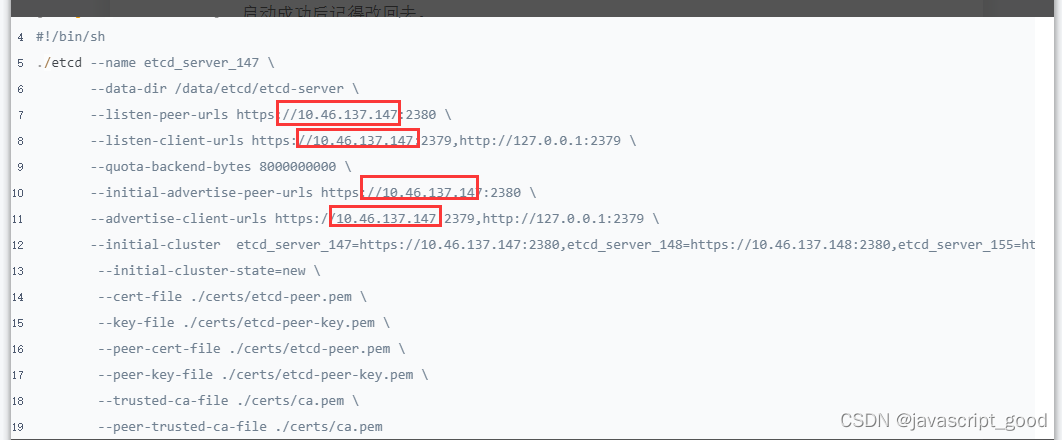
etcd健康检查报错127.0.0.1:2379 is unhealthy: failed to commit proposal: context deadline exceeded
我有三个节点装etcd , 三个都能启动,但是在使用/opt/etcd/etcdctl endpoint health健康检查的时候有一台报如下错 最后仔细检查配置,发现有一个节点的配置的ip没有修改对, 有两台机器框出来的这里都写成了147,把 ip修改对后,在同时重启三台服务器上的etcd,启动正常,健康检查也正常了

C#,数值计算——数据建模Proposal的计算方法与源程序
1 文本格式 using System; namespace Legalsoft.Truffer { public class Proposal { public Normaldev gau { get; set; } = null; private double logstep { get; set; } public


RPN(Region Proposal Network)区域生成网络
【对RPN的学习记录】 定义: Region Proposal的中文意思是“区域选取”,也就是“提取候选框”的意思,所以RPN就是用来提取候选框的网络。RPN第一次提出是在Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks论文中,用于目标检测。它是一个完全卷积的网络,它可以同时预测每个位置

FasterRCNN源码解析(六)——RPN(中)Proposal的获取
FasterRCNN源码解析(六)——RPN(中)Proposal的获取 利用生成的anchos以及RPNHead模块得到的预测分数以及目标边界框回归参数,获取proposal,然后再经过一系列算法滤除部分proposal,得到我们RPN模块输出的proposal。 文章目录 FasterRCNN源码解析(六)——RPN(中)Proposal的获取一、RegionProposalNetw

卷积神经网络——RPN(Region Proposal Network)介绍
RPN,从字面上理解区域候选网络,是用来生成候选区域的网络。 这个网络的输入输出是什么呢?看一下Faster RCNN的网络结构(下图中框内的部分)就可以看出,输入是前面backbone得到的特征图,输出是一些Proposal。 RPN网络可以分为这么几部分:生成anchor;对anchor进行二分类;边框回归;生成最终的Proposal。下面分别介绍一下。 生成anchor box a