pointcloud2专题

发布sensor_msgs::PointCloud2点云数据
发布sensor_msgs::PointCloud2点云数据 方法一: //设置消息头文件和初始化节点#include <ros/ros.h>#include <sensor_msgs/PointCloud2.h>#include <sensor_msgs/point_cloud2_iterator.h>#include <geometry_msgs/Point.h>//

ROS的pointcloud2 格式和PCD格式总结以及转换
pointcloud2 这个是ROS定义的消息类型, 它的结构如下: Header header# 2D structure of the point cloud. If the cloud is unordered, height is# 1 and width is the length of the point cloud.uint32 heightuint32 width# De
ros2 订阅 sensor_msgs/msg/PointCloud2
1.消息结构 daichang@daichang-ASUS:~/Desktop/ros2_ws$ ros2 interface show sensor_msgs/msg/PointCloud2# This message holds a collection of N-dimensional points, which may# contain additional information
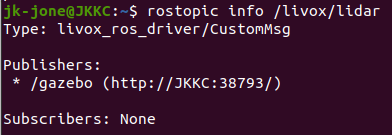
点云格式转换:将 ros PointCloud2格式数据转为livox CustomMsg格式
将 ros PointCloud2格式数据转为livox CustomMsg格式 前言点云格式PointCloud2 点云格式livox CustomMsg 点云格式 将 ros PointCloud2格式数据转为livox CustomMsg格式测试 前言 览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。
点云 ros PointCloud2格式与livox CustomMsg格式介绍
点云 ros PointCloud2格式与livox CustomMsg格式介绍 PointCloud2 点云格式livox CustomMsg 点云格式 PointCloud2 点云格式 PointCloud2 是ros的一种点云格式 具体官方数据 http://docs.ros.org/en/jade/api/sensor_msgs/html/msg/PointClou