optimal专题

uva1349 Optimal Bus Route Design 费用流,二分图匹配
题意:n个景点和一些路径,找到任意数目的路径,路径是一个环,使每个景点仅属于一个环,使权值最小。 分析:每个景点的入度和出度都是1,拆分每个景点u,u',若输入u-v,建立u-v'的边,是一个二分图,若存在完美匹配,说明存在若干个环使每个景点属于其中一个环。增加一个起点s和终点t,边权为费用,所有边的容量都为1,求最小费用最大流,若flow==节点数,存在完美匹配,cost即为答案。 #i
UVA | Optimal Binary Search Tree
原题 题目链接:https://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&category=514&page=show_problem&problem=1245 Given a set S = (e1, e2, …, en) of n distinct elements such that e1 < e2 < …

UVA 12295 Optimal Symmetric Paths(spfa+记忆化)
题意: 求从左上角到右下角的最短路径数,且要求沿斜线对称 思路: 既然要求对称,所以我们将对称的权值叠加,那么就是求到对角线的最短路径了,通过dp解决方案数 // whn6325689// Mr.Phoebe// http://blog.csdn.net/u013007900#include <algorithm>#include <iostream>
553. Optimal Division 最优除法
https://leetcode-cn.com/problems/optimal-division/description/ 思路:x1/x2/…/xn,无论在之间加多少个括号,x1总是作为被除数,x2总是作为除数,因此结果最大的做法是将x3到xn的所有除法转换为乘法,即x1/(x2/…/xn)=x1/x2*x3*…*xn. string optimalDivision(vector<int>
UVA - 10304 Optimal Binary Search Tree
题意:给定一个序列 S= (e1, e2, ..., en), 将这些序列构成一个二叉搜索树,要求按深度*频率的总权值最小,根节点深度为0,跟矩阵连乘相似,显然这题具有最优子结构,所以我们假设dp[i][j]表示从(i,j)构成的搜索树最小是多少,然后便模仿矩阵连乘的思路,枚举每一个点作为根节点,接着就是确定状态转移方程了,当我们确定k为节点的时候,那么序列(k1,...,k-1)作为左子树的
uva 11782 - Optimal Cut(dp)
题目链接:uva 11782 - Optimal Cut 题目大意:按照前序给出一棵完全树的前序,每个节点的值,现在要求在这棵树上切最多k刀,使得获得的值最大,但是有一个要求,就是对于每颗子树来说,最多切一刀,并且每个叶子节点都要被切掉才行。 解题思路:dp[i][k]表示i节点为根的子树,切k刀后的最大值。每个节点都有左孩子和右孩子之分,对于一个状态dp[i][k],枚举左孩子的
UVA 656 - Optimal Programs(BFS)
链接:http://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&page=show_problem&category=457&problem=597&mosmsg=Submission+received+with+ID+12890692 题意:给定x序列要求通过最小步骤最小字典变成y序列。求变换方法。 思路:BFS
Optimal Array Multiplication Sequence UVA - 348 (最优矩阵链乘+递归输出路径+区间dp)
题目链接:https://vjudge.net/problem/19208/origin 题目大意: 对于一个a*b和b*c的矩阵相乘的结果为a*b*c, 如果有三个矩阵相乘就是a*b b*c c*d 这三个矩阵相乘,因为满足结合律,所以可以先乘后两个,再和第一个相乘。由于先乘那一对矩阵决定了运算量的大小,所以让你计算怎么结合相乘能使得运算量最小。 那么什么是运算量的大小呢:比如有三个矩阵为
POJ 2112 Optimal Milking (二分+匈牙利)
题意:在一片草场上有K台挤奶机,每台挤奶机最多可以为M头奶牛挤奶。有C头奶牛。把奶牛和挤奶机看做个体,则所有个体之间有一定的距离。现在给出K,C,M以及所有个体之间的距离。在保证所有奶牛都可以挤奶的情况下,求路程最长的奶牛的最小路程。 题解: 题目已经保证了所有奶牛都可以挤奶,那么最长的路径自然是 (顶点数-1) * 200。我们只需要二分最小路程,然后判断在此情况下是否所有的奶牛都存在合适的匹配
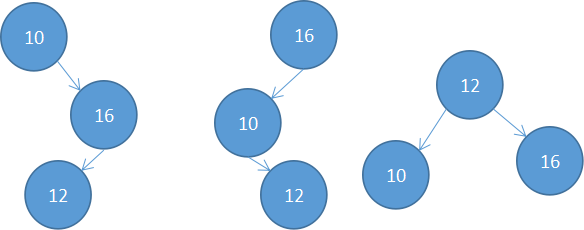
uva10304 Optimal Binary Search Tree(最优二叉排序树 区间dp)
题意:给n个符号建立一棵排序二叉树,给出每个符号检索的频率,要求从检索的次数最小。 分析:《训练指南》P64,很详细。 代码: #include<bits/stdc++.h>using namespace std;const int INF = 0x3f3f3f3f;const int N = 210;int n;int w[N];int sum[N];int f[N][N];i
洛谷P3097 - [USACO13DEC]最优挤奶Optimal Milking
Portal Description 给出一个\(n(n\leq4\times10^4)\)个数的数列\(\{a_n\}(a_i\geq1)\)。一个数列的最大贡献定义为其中若干个不相邻的数的和的最大值。进行\(m(m\leq5\times10^4)\)次操作,每次修改数列中的一个数并询问此时的最大贡献。 Solution 线段树。 对于线段树上每个节点\([L,R]\),维护四个值\(f_{0
![[CF1601C]Optimal Insertion](/front/images/it_default2.jpg)
[CF1601C]Optimal Insertion
Optimal Insertion 题解 怎么一群人都可以在考场上切这道题呀 首先,我们观察到一个性质,我们最终得到的序列 c c c中,来自 b b b的元素的顺序一定是升序的,即权值不递减。 显然,对于 b i > b j b_{i}>b_{j} bi>bj, b i b_{i} bi的最优决策点一定不会在 b j b_{j} bj的左边,该性质在我们下面的转移过程中可以见得。

SpringBoot2.0启动日志中出现The APR based Apache Tomcat Native library which allows optimal performance in
在启动SpringBoot程序当中,日志记录当中有下面一条记录: The APR based Apache Tomcat Native library which allows optimal performance in production environments was not found on the java.library.path: [C:\Program Files\Jav
UVa 348 Optimal Array Multiplication Sequence (区间DP矩阵链乘,MCM)
348 - Optimal Array Multiplication Sequence Time limit: 3.000 seconds http://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&category=24&page=show_problem&problem=284 记忆化搜索:dp[a]
The APR based Apache Tomcat Native library which allows optimal performance in
问题:tomcat容器启动时报错: The APR based Apache Tomcat Native library which allows optimal performance in production environments was not found 原因:tomcat的系统环境变量没有配置。 解决办法: 配置Tomcat环境变量 1,新建变量名:CATALINA_HO
GMMCP Tracker:Globally Optimal Generalized Maximum Multi Clique Problem for Multiple Object Tracking
来源:CVPR2015 创新点: 数据关联是众多多目标跟踪方法的主干。在本文中,作者把数据关联问题公式化为一种广义的最大化多团问题(a Generalized Maximum Multi Clique problem,GMMCP),并且通过二值整数规划来解决。之前的工作假设我们的跟踪器要么在问题表述上简化,要么在问题优化上简化。然而,本文所提的GMMCP在这两个方面都没有简化。此外,还提出
【线段树】Optimal Insertion(CF751E)
正题 CF751E 题目大意 给你一个数组a和一个集合b,现在让你把b中的数插入a,使得逆序对最少 解题思路 先计算a中的逆序对 对于b和a的逆序对,可以对数字进行排序,用线段树存下放每个位置的最小代价,然后直接求最小值 code #include<cstdio>#include<cstring>#include<iostream>#include<algorit
YOLOv4阅读笔记(附思维导图)!YOLOv4: Optimal Speed and Accuracy of Object Detection
今天刷看到了YOLOv4之时,有点激动和兴奋,等了很久的YOLOv4,你终究还是出现了 论文地址:https://arxiv.org/pdf/2004.10934.pdf GitHub地址:https://github.com/AlexeyAB/darknet 觉得作者很地道,论文附上开源,没有比这更开心的事情了吧! 首先附上对论文总结的思维导图,帮助大家更好的理解! (思维
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-4 轨迹追踪](https://img-blog.csdnimg.cn/direct/40f20d6d28c74c3a981944c5315bfd56.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-4 轨迹追踪
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-4 轨迹追踪 1. 目标误差控制-误差的调节2. 稳态非零值控制3. 输入增量控制 1. 目标误差控制-误差的调节 2. 稳态非零值控制 3. 输入增量控制
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming](https://img-blog.csdnimg.cn/direct/718639af45714c9496ccc3df795adbff.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming 1. 基本概念2. 代码详解3. 简单一维案例 1. 基本概念 Richoard Bell man 最优化理论: An optimal policy has the property th
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标](https://img-blog.csdnimg.cn/direct/795a53af3e9143c7b8b4dc4861f83c39.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-1最优控制问题与性能指标
The APR based Apache Tomcat Native library which allows optimal performance in production ...
Tomcat启动的时候出现下面这样的提示: The APR based Apache Tomcat Native library which allows optimal performance in production environments was not found on the java.library.path:E:\Java\jdk1.6.0_06\bin;.;C:\WI
【博士每天一篇论文-算法】Optimal modularity and memory capacity of neural reservoirs
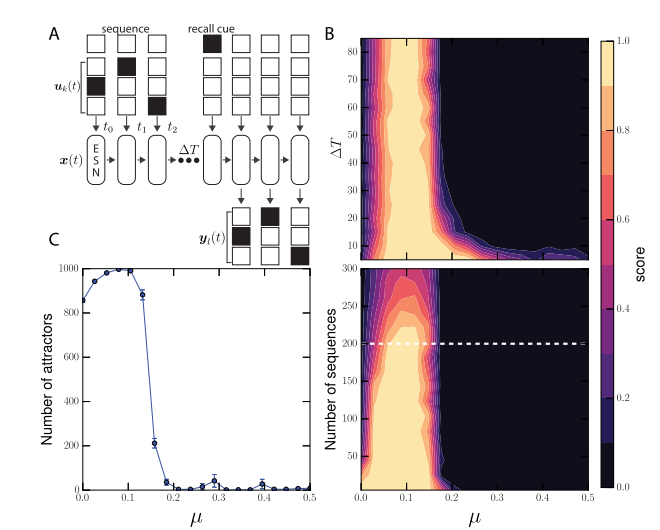
阅读时间:2023-11-15 1 介绍 年份:2019 作者:Nathaniel Rodriguez 印第安纳大学信息学、计算和工程学院,美国印第安纳州布卢明顿 期刊: Network Neuroscience 引用量:39 这篇论文主要研究了神经网络的模块化与记忆性能之间的关系,提出记忆性能存在一个最佳模块化程度,即在局部凝聚性和全局连接性之间建立平衡。这种最佳模块化可以使神经网络具有更长
uva 348 Optimal Array Multiplication Sequence
题意:给你n个矩阵,要你计算矩阵乘的最少运算量。 #include <iostream>#include <cstdio>#include <cstring>using namespace std;const int N=12;struct node{int x,y;}m[N];int map[N][N],ileft[N],iright[N];int dp(int,int)

《YOLOv4: Optimal Speed and Accuracy of Object Detection》论文翻译
最新的YoloV4已经出来好久了,今天主要读一下看看相比于YoloV3有什么改进和创新的地方,主要是来学习学习。废话不多说,开始。 Abstract 摘要 There are a huge number of features which are said to improve Convolutional Neural Network (CNN) accuracy. Practical
【环境配置】Towards Globally Optimal Normal Orientations for Large Point Clouds
文章目录 一、所用环境二、环境配置 一、所用环境 windows 10 22H2(内部版本 19045.3693)该版本主要是为了兼容vs2022vs2022 professioncmakevcpkg 二、环境配置 1、安装vcpkg $ git clone https://github.com/microsoft/vcpkg$ .\vcpkg\bootstrap-vcp