octree专题

基于octree的空间划分及搜索操作
(1) octree是一种用于管理稀疏3D数据的树形数据结构,每个内部节点都正好有八个子节点,介绍如何用octree在点云数据中进行空间划分及近邻搜索,实现“体素内近邻搜索(Neighbors within VOxel Search)”,"K近邻搜索(K Nearest Neighbor Search)","半径内近邻搜索"(Neighbors within Radius Search)
Enhancing Octree-Based Context Models for Point Cloud Geometry Compression 论文笔记
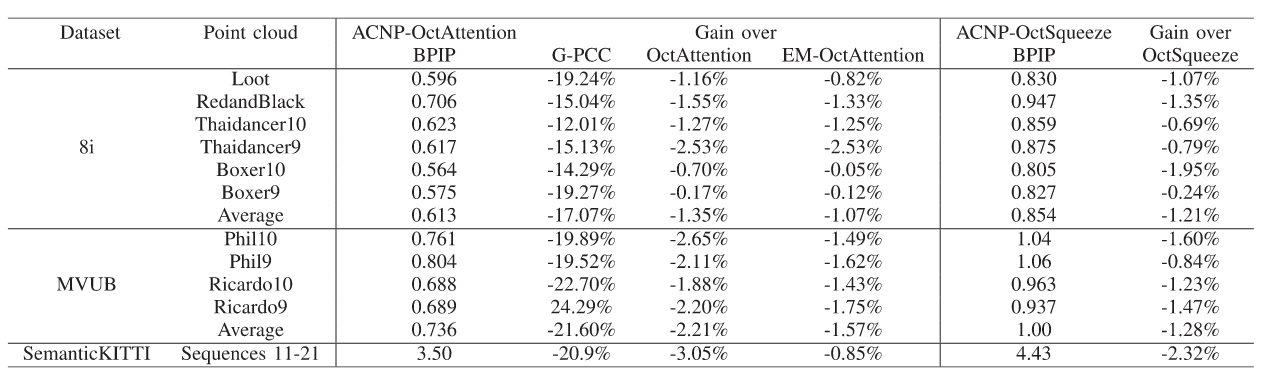
1. 论文基本信息 发布于: IEEE SPL 2024 2. 创新点 分析了基于 one-hot 编码的交叉熵损失函数为什么不能准确衡量标签与预测概率分布之间的差异。介绍了 ACNP 模块,该模块通过预测占用的子节点数量来增强上下文模型的表现。实验证明了ACNP模块在基于八叉树的上下文模型中的有效性。 3. 背景 现有上下文模型的局限性: 现有的上下文模型使用交叉熵作为损失函

点云处理中阶 Octree模块
一、什么是Octree 八叉树(Octree)是一种用于描述三维空间的树状数据结构。八叉树的每个节点表示一个正方体的体积元素,每个节点有八个子节点,这八个子节点所表示的体积元素加在一起就等于父节点的体积。一般中心点作为节点的分叉中心。且每个节点可以继续分割,直到满足某个条件(如达到最大深度或最小点数)。这种结构特别适合于稀疏点云数据的处理,能够高效地进行空间查询和操作。 实现八

KDTree和Octree的区别
在PCL(PointCloud Library)中,KD 树(KDTree)和 Octree(Octree)都是用于高效搜索点云数据的数据结构,它们之间的主要区别在于其构建方式和搜索性能: KD 树(KDTree): KD 树是一种二叉树数据结构,用于对 k 维空间中的点进行分割和组织。 构建 KD树的过程是递归的,在每一层选择一个维度进行划分,以便将点云空间划分为两个子空间,然后在子空间中继

《PCL》octree_key.h
int 占据 2 byte 即 8 bit 故:1 为 0000001 Octree key :包含每个坐标轴的整数索引,以便寻找八叉树叶节点。 namespace pcl{namespace octree{class OctreeKey{public:OctreeKey () : x (0), y (0), z (0){ }OctreeKey (unsigned int keyX, unsi
《PCL》octree_base.h由 子节点索引获取指向该节点指针
bool ///检查枝节点(父节点)是否指向特定的子节点branchHasChild(const BranchNode& branch_arg,unsigned char child_idx_arg) const{return(branch_arg.getChildPtr(child_idx_arg) != 0); /// true 子节点的指针存在。} inline Octre

【点云处理技术之PCL】Octree
1. 八叉树简介 八叉树是一种用于描述三维空间的树状数据结构,八叉树的每个节点表示一个正方体的体积元素,每个节点有八个子节点,将八个子节点所表示的体积元素加在一起就等于父节点的体积。 2. 点云的压缩 点云信息一般比较包含了丰富的信息而且点云数量也是比较多,这就需要我们对点云数据进行压缩。pcl中提供了点云压缩功能,而且还可以通过八叉树将两个不同的点云进行合并。 点云压缩的代码

PCL:八叉树(Octree)实现点云体素内近邻搜索
1 八叉树 Octree 八叉树(Octree)结构是由 Hunter 博士于1978年首次提出的一种数据模型。八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成8个子立方体,依次递剖分,

在编译pcl中octree官方提供代码示例时报错undefined reference to `pcl::octree::OctreePointCloud问题解决
在编译octree官方提供代码示例时出现很多undefined reference to...如下所示: /usr/bin/ld: CMakeFiles/octree_change_detection.dir/octree_change_detection.cpp.o: in function `main': octree_change_detection.cpp:(.text+0x2ca):