occupancy专题
Occupancy Head 以 Surroundocc 为例
Surroundocc framework 让我们以SurroundOcc为例,详细探讨整个处理流程,以便大家更好地理解Occupancy HEAD的概念。 在流程的最左端,我们有多摄像头特征(Multi-camera features),这对应于我们先前提到的图像视图编码器(Image-View Encoder)。这实际上是类似于U-net的结构,用于多尺度RGB图像的二维特征提取。简而
3D Occupancy 预测冠军方案:FB-OCC
文章结尾有视频和连接 背景知识 Occupancy 更像是一个语义分割任务,但是它是 3D 空间的语义分割它的我们对 Occupancy 分自己的期望是它能够具有通用的这种目标建模的能力,才能够不是不受制于这种目标框这种几何的矩形的这种约束而能够建模任意形状的这种物体,或者这种其他类别。 (1) LiDAR 方法 (2)RGB-D 方法 (3)相机方法 只用前两种方案,因为它们有深度信
机器学习笔记 占用网络简述(Occupancy Networks)
1、简述 在之前的文章中,我们深入研究了各种 3D 数据表示。我们看到了传统方法的缺点以及对精确捕捉 3D 对象复杂性的先进方法的需求。现在,让我们深入探讨我们表示 3D 形状的方式,占用网络。 https://skydance.blog.csdn.net/article/details/134672671https://skydance.blog.csdn.net/art
51 -25 Scene as Occupancy 3D占用作为场景表示 论文精读
本文阅读的文章是Scene as Occupancy,介绍了一种将物体表示为3D occupancy的新方法,以描述三维场景,并用于检测、分割和规划。 文章提出了OccNet和OpenOcc两个核心概念。 OccNet 3D占用网络是一种以多视图视觉为中心的方法,通过层级化的体素解码器,可以重建3D感知模型和3D占用,适用于多种下游任务。 OpenOCC是一种3D占用基准,第一个基于nuSc
【占用网络】OccNet: Scene as Occupancy 适用于检测、分割和规划任务 ICCV2023
前言 本文分享“占用网络”方案中,具有代表性的方法:OccNet。 它以多视角相机为核心,首先生成BEV特征,然后通过级联结构和时间体素解码器重建生成3D占用特征。 构建一个通用的“3D占用编码特征”,用以表示3D物理世界。这样的特征描述可以应用于广泛的自动驾驶任务,包括检测、分割和规划。 论文地址:Scene as Occupancy 开源地址:https://github.com/O

经典文献阅读之--RenderOcc(使用2D标签训练多视图3D Occupancy模型)
0. 简介 3D占据预测在机器人感知和自动驾驶领域具有重要的潜力,它将3D场景量化为带有语义标签的网格单元。最近的研究主要利用3D体素空间中的完整占据标签进行监督。然而,昂贵的注释过程和有时模糊的标签严重限制了3D占据模型的可用性和可扩展性。为了解决这个问题,《RenderOcc: Vision-Centric 3D Occupancy Prediction with 2D Rendering

【论文笔记】Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
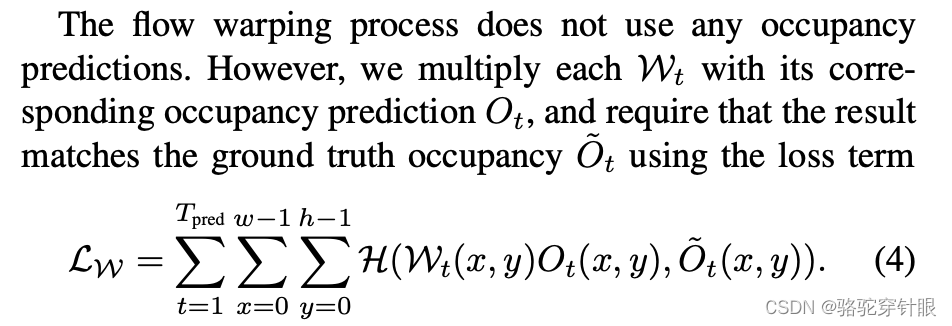
原文链接:https://arxiv.org/abs/2302.13130 1. 引言 运动规划需要预测其余物体的运动,但相应的感知模块如建图、目标检测、跟踪和轨迹预测通常都需要大量人力标注HD地图、语义标签、边界框或物体的轨迹,难以扩展到大型无标签数据集上。3D点云预测是一种自监督方法,但其算法隐式地捕捉传感器的外参(自车运动)、内参(激光雷达的采样模式)和其余物体的形状与运动。但自动驾驶系

CUDA优化策略之-achieved occupancy
概述 占用率的定义 /*SM(Streaming Multiprocessor,流式多处理器):构成GPU的基本硬件单元; multiprocessor:在CUDA里概念和SM一样; 激活warp:在warp中的所有线程在核函数中从开始执行到全部结束的过程; 在每个SM中存在允许最大激活warp的数量; */ 占用率(occupancy):在SM上实际激活warp数量与理论最大激活w