noetic专题
Ubuntu20.04+ros-noetic配置Cartographer
一、概述 因为要配置激光SLAM,Cartographer属于激光雷达SLAM 中比较经典的一款,在学习之前先将其在Ubuntu20.04首先配置出来并成功运行demo。 二、具体操作 (一)概述 使用平台是Windows的wsl2上的Ubuntu20.04子系统,双系统与虚拟机的安装原理与这个相同。主要依照的安装操作是官方文档,链接如下所示。 Runni

ros(noetic) 之moveit机械臂
sudo apt updatesudo apt install ros-noetic-moveit-setup-assistant source devel/setup.sh rosrun moveit_setup_assistant moveit_setup_assistant

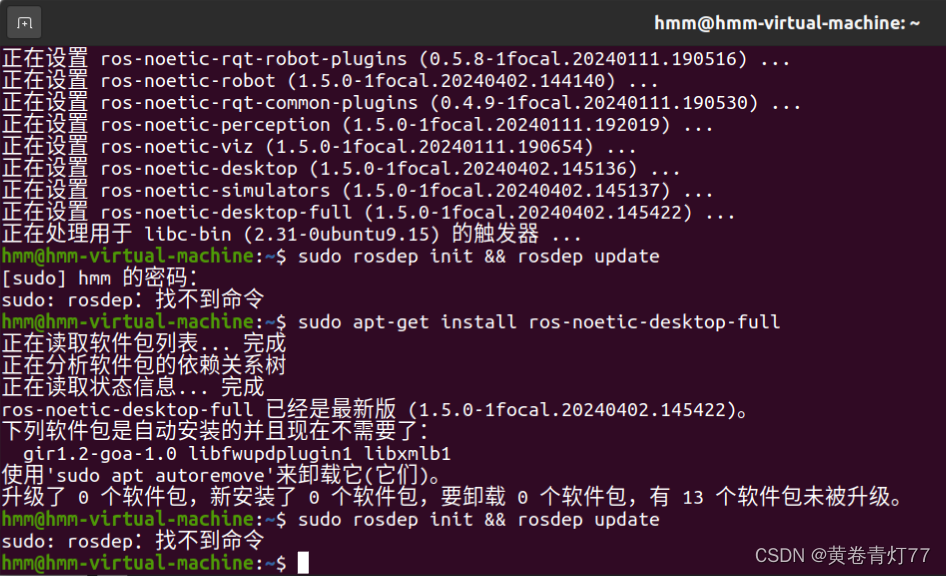
ubuntu20 安装ros noetic版本
【ROS】Ubuntu20.04卸载重装ROS_ubuntu20.04卸载ros-CSDN博客 错误处理——rosdep init,rosdep update失败解决方案_rosdep init出错-CSDN博客 ubuntu 20.04解决在处理时有错误发生: /var/cache/apt/archives/python3-catkin-pkg-modules_0.4.24-1_all.de
ubuntu 22.04 apt非源码安装ros1 noetic
教程 https://zhuanlan.zhihu.com/p/679914618?utm_id=0 文章目录 安装安装后配置验证安装卸载 安装 添加源: echo "deb [trusted=yes arch=amd64] http://deb.repo.autolabor.com.cn jammy main" | sudo tee /etc/apt/sources.li
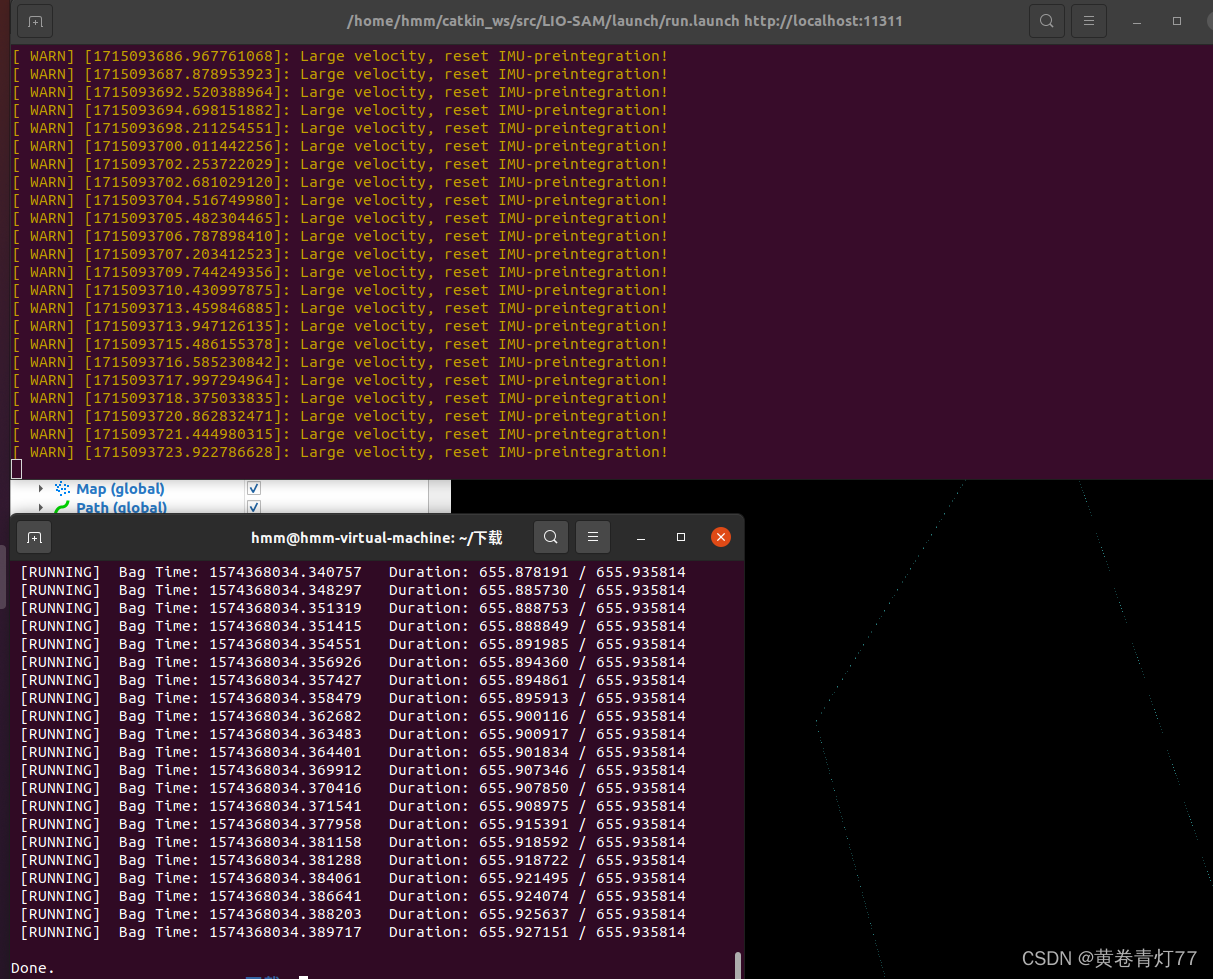
20240507 ubuntu20.04+ros noetic 跑通lioslam
任务:跑通lioslam 主要参考博客 IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程_ubuntu_AIDE回归线-GitCode 开源社区 (csdn.net) 1.不要用这一句 wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
20240507最新 ubuntu20.04安装ros noetic
ubuntu20.04安装ros 主要参考博客 【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程_ubuntu20.04安装ros-CSDN博客 出现问题 1.ubuntu20.04 更换清华源报错 ubuntu20.04 更换清华源报错_gvfs metadata is not supported. fallback to teplme-CSDN博客 ???没
![Ubuntu20.04 [Ros Noetic]版本——在catkin_make编译时出现报错的解决方案](https://img-blog.csdnimg.cn/direct/019cebf238d841ccab1fd32b1d89df70.png)
Ubuntu20.04 [Ros Noetic]版本——在catkin_make编译时出现报错的解决方案
今天在新的笔记本电脑上进行catkin_make的编译过程中遇到了报错,这个报错在之前也遇到过,但是,我却忘了怎么解决。很是头痛! 经过多篇博客的查询,特此解决了这个编译报错的问题,于此特地记录!!! 整体报错信息如下: Base path: /home/hjx/hjx_file/URDF_model/catkin_wsSource space: /home/hjx/hjx_file/

【AGX】Ubuntu20.04 + ROS_ noetic+ 大疆Mid360激光 雷达评测
大家好,我是虎哥,最近组装机器人,使用到了大疆孵化的圳市览沃科技有限公司(简称Livox览沃科技)推出的觅道系列全新混合固态激光雷达Mid-360,顺便试试效果,也记录一下使用入门过程。 "觅道Mid-360激光"是大疆公司推出的一款激光雷达传感器。该传感器主要用于飞行器或其他机器人的导航和避障。Mid-360激光雷达采用激光束扫描技术,能够快速而精确地探测周

【Ubuntu20.04+Noetic】UR5e+Gazebo+Moveit
环境准备 创建工作空间 mkdir -p ur5e_ws/srccd ur5e_ws/src UR机械臂软件包 UR官方没更新最新的noetic的分支,因此安装melodic,并需要改动相关文件。 安装UR的模型配置包,包里面有UR模型文件,moveit配置等: cd ~/ur5e_ws/srcgit clone -b melodic-devel https://githu

Ubuntu 20.04 安装ROS Noetic教程
背景知识 不同版本Ubuntu支持不同版本ROS,版本不匹配,安装和后续使用可能会出现问题。 UbuntuROS 1.0ROS 2.016.04 LTSKinetic LTSArdent18.04 LTSMelodic LTSDashing LTS20.04 LTSNoetic LTSFoxy LTS Ubuntu 20.04 支持的ROS1版本为Noetic LTS,ROS2版本为Foxy
![ROS noetic [turtle1_tf_broadcaster-4] process has died](/front/images/it_default2.jpg)
ROS noetic [turtle1_tf_broadcaster-4] process has died
运行下面的指令 roslaunch turtle_tf turtle_tf_demo.launch 报错: ... logging to /home/mc/.ros/log/1d03f5da-9257-11ec-8b40-912958d5c310/roslaunch-ubun-29906.logChecking log directory for disk usage. This may
ROS noetic view_frames TypeError: cannot use a string pattern on a bytes-like object
ROS noetic + Ubuntu20.04报错: mc@ubun:~$ rosrun tf view_framesListening to /tf for 5.0 secondsDone Listeningb'dot - graphviz version 2.43.0 (0)\n'Traceback (most recent call last):File "/opt/ros/no
ROS2学习(二):仿真案例汇总(基于Ubuntu_2004 ROS2_noetic)
文章目录 一、slam仿真1、安装环境依赖2、创建Turtlebot3目录并下载安装3、配置Turtlebot3环境4、运行slam仿真 一、slam仿真 1、安装环境依赖 sudo apt install ros-noetic-cartographer ros-noetic-cartographer-ros 2、创建Turtlebot3目录并下载安装 mkdir
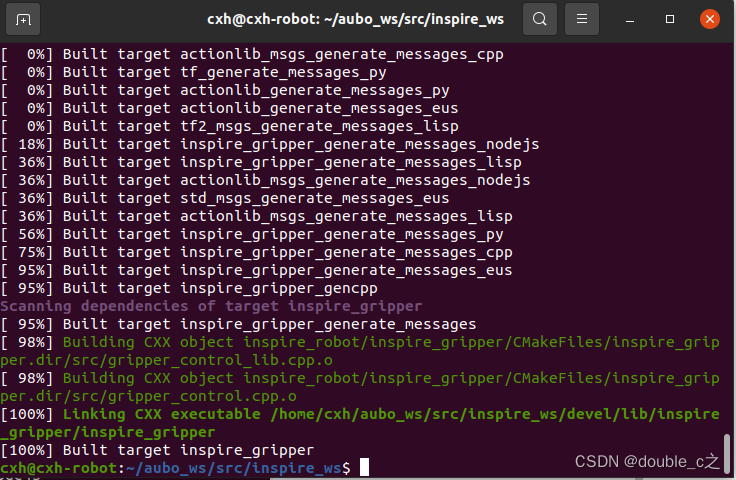
noetic ros配置因时机械夹爪的驱动
noetic ros配置因时机械夹爪的驱动文件 配置编译教程解决方案 配置编译教程 1.inspire_robot 包支持因时机器人公司的机械夹爪在ROS平台上的使用,我们在ros noetic环境下进行了测试。 2.为了使程序能够正常运行,需要执行以下环境配置操作:(首次执行的需要,配置好了就不需要了) 1)安装ros-noetic环境,具体安装方式如下: (1)配置Ubunt

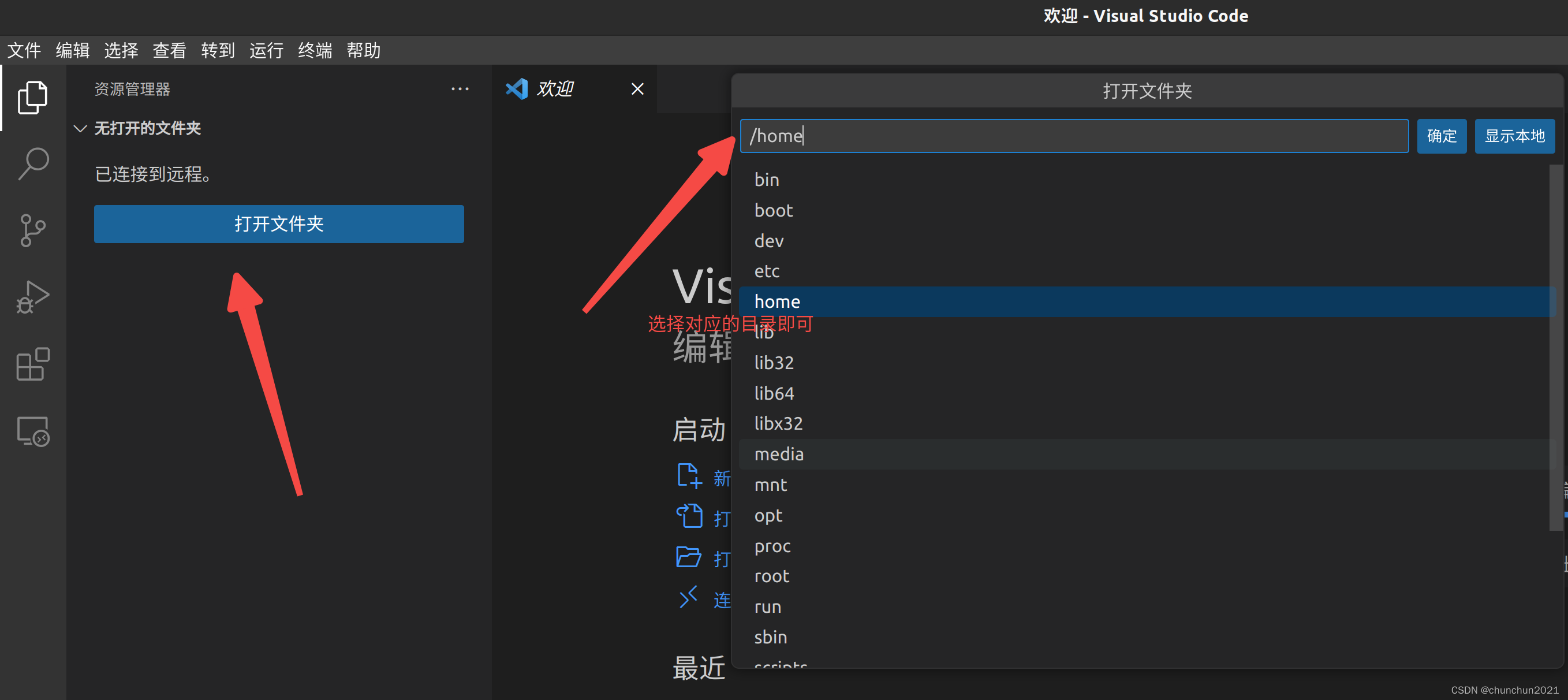
机器人学环境配置(VM-16 + Ubuntu-20.04 + ROS-noetic)
目录 一、安装好 VMware Pro 16(基于win11) 1. 下载 2. 安装过程 二、成功配置Ubuntu20.04.6 1. 下载 2. 新建虚拟机进行配置 3. 安装操作系统镜像 4. 更改Ubuntu软件源 5. Windows与Ubuntu跨系统复制粘贴 三、成功配置与Ubuntu20.04对应的ROS 1. 按ctrl+alt+t打开终端并在其中依次输入

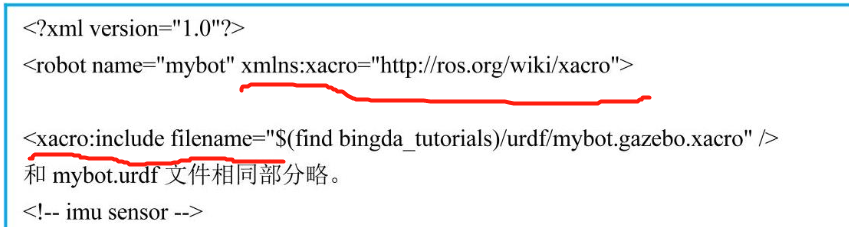
Noetic-cartographer跑自己的数据包----记录(脑子不好容易忘记)
根据官网的提示 和大佬:https://blog.csdn.net/qq_40216084/article/details/104599308?的文章 1.在/cartographer_ws/install_isolated/share/cartographer_ros/目录下 (1)在上面的目录下urdf中建立你自己的urdf文件my_robot_.urdf <!--Copyright 201

Ubuntu 22.04 apt 安装 ros1 ros Noetic Ninjemys
众所周知 ros2还有很多功能没有移植,而ros1官方不再支持 ubuntu 20.04 之后的版本。另一方面Ubuntu 22.04 更新了很多对新硬件的驱动,有更好的兼容性和体验,这就变的很纠结。 如果想在 22.04 使用最新版本的 ros noetic 只有自己编译一个办法。编译整套 ros。 对于初学者来说是个不小的挑战, 需要解决数量众多的库依赖和 C++ 版本兼容问题。 今天偶然
Ubuntu20.04 安装 ROS noetic + MAVROS
本文在 AlphaCatOvO【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程 基础上,根据实际安装经验,稍微进行补充。 一、安装Ubuntu20.04 假设已经正确安装。 二、安装 ROS noetic 2.1 换源 执行 sudo apt updatesudo mv /etc/apt/sources.list /etc/apt/sources_default.li

ROS Noetic Ninjemys遇见Ubuntu 20.04
ROS Noetic Ninjemys是ROS1最具里程碑式的版本!为什么呢? 使用新立得安装过程更为简洁: 详细安装目录如上图所示。 同时安装了ROS1Noetic和ROS2Foxy,可以参考如下代码进行默认环境选择: # ROS 1.0 noetic or ROS 2.0 foxyecho Hello, ROS 1.0 or ROS 2.0? 1=noetic 2=
ubuntu 22.04源码装ros1 noetic
ubuntu 22.04源码装ros1 noetic 文章目录 ubuntu 22.04源码装ros1 noetic1. 安装依赖2. 更换rosdep相关的rep链接3. 安装 rosdep4. 创建工作空间下载源码并安装5. 编译代码5.1 修复rosconsole* log相关问题**error**5.3 python-sip配置相关5.4 *std::share_mutex* 相关

ubuntu20.04在noetic下编译orbslam2
ubuntu20.04在noetic下编译orbslam2 参考链接1:https://blog.csdn.net/qq_58869016/article/details/128660588 参考链接2:https://blog.csdn.net/dong123456789e/article/details/129693837 在noetic下的安装环境 1.库安装 sudo apt-get
ubuntu20.04在noetic下编译orbslam2
ubuntu20.04在noetic下编译orbslam2 参考链接1:https://blog.csdn.net/qq_58869016/article/details/128660588 参考链接2:https://blog.csdn.net/dong123456789e/article/details/129693837 在noetic下的安装环境 1.库安装 sudo apt-get
ubuntu20.04在docker下运行ros-noetic进行开发
经常折腾虚拟机各双系统 , 想着不如把docker利用起来,下面算是一个初学者使用docker运行ros的记录: 1. 安装 使用官方安装脚本自动安装 curl -fsSL https://test.docker.com -o test-docker.shsudo sh test-docker.sh 验证是否安装成功 docker version Docker 需要用户具有 su
ROS noetic 运行python节点报错:/usr/bin/env: ‘python’: No such file or directory
ROS noetic用的是python3,所以要为其创造符号链接,使用如下命令: sudo ln -s /usr/bin/python3 /usr/bin/python 参考:ROS noetic 报错 “/usr/bin/env: “python”: 没有那个文件或目录”

Ubuntu20.04安装ROS Noetic (一篇博客走遍天)
文章目录 前言一、版本选择二、下载步骤1. 设置ROS的下载源1.1 设置中科大源1.2 设置自己主机的公钥1.3 更新最新可用软件包列表 2. 安装ROS2.1 ROS 桌面完全版本2.2 ROS 桌面版本2.3 ROS基础版本2.4 ROS额外功能包 DLC 3. 设置环境变量3.1 bash3.2 zsh3.3 随心所欲切换环境 4. 下载安装包的依赖5. rosdep初始化常见报错与
Gazebo仿真 【ROS: noetic】
参考链接:《ROS机器人开发实践》_胡春旭 目标: 了解如何使用URDF文件创建一个机器人模型,然后使用xacro文件优化该模型,并且放置到rviz+ArbotiX或Gazebo仿真环境中,以实现丰富的ROS功能。 4.5 Gazebo仿真环境 1)动力学仿真:支持多种高性能的物理引擎,如ODE、Bullet、SimBody、DART等。2)三维可视化环境:支持显示逼真的三维环境,包括