nanopi专题

NanoPi-m1-plus修改开机画面
开机logo:直接替换掉原来友善之臂的logo即可 开机过程中的打印信息:开机过程中进到uboot里,原来的环境变量里有fbconsole=tty0,执行setenv fbconsole删除该环境变量即可
为Nanopi m1交叉编译opencv
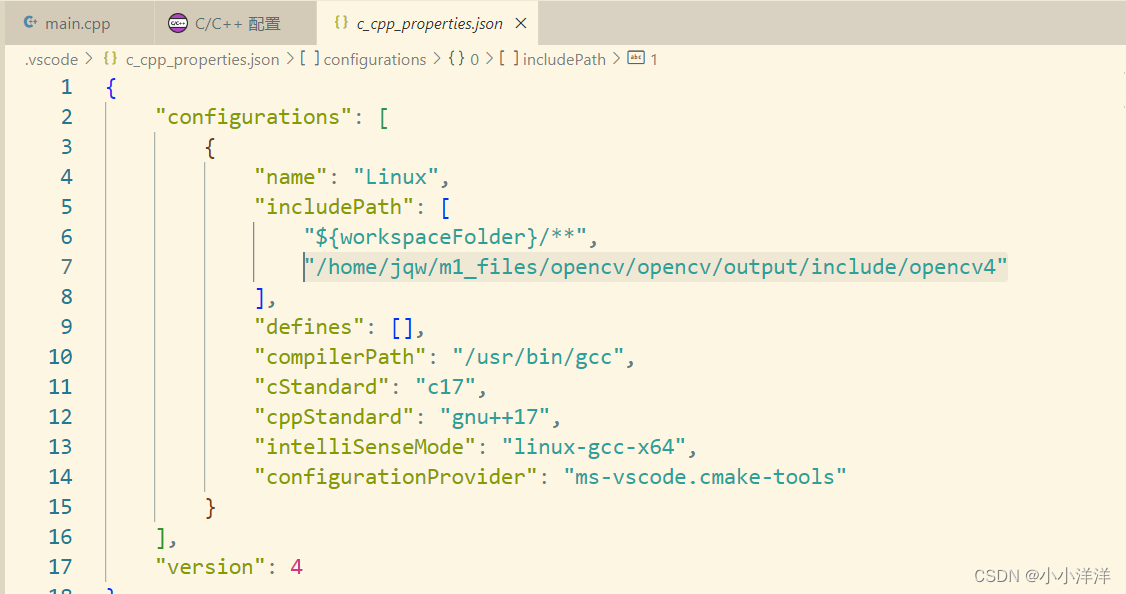
为Nanopi m1交叉编译opencv 一、下载交叉编译器 根据之前的博客进行 二、下载opencv和必要库 sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev git clone https://github.com/open

【NanoPi2试用体验】nanopi远程监控
看了其他试用者的试用帖,想把微信和监控结合起来,然而连个公网ip也木有,微信那些也不太会,所以参考了下人家树莓派的怎么做的,于是就有了 Nanopi2和Yeelink 的远程监控。 在线看效果如下:http://www.yeelink.net/devices/344726 截图: 在上一篇帖的基础上,我们只需做如下步骤即可: 注册,登录Yee

NanoPi M2编译Debian步骤详解
为Nanopi编译debian系统的方法在官方的手册上已经有详细的介绍,但从linux新手的角度,不仅应该会编译,还可以尝试下理解其每一步的含义。 环境与准备: 1、Ubuntu kylin 16.0( 64位!!! ) 2、Git 3、 https://github.com/friendlyarm 中的各个文件 零、安装git 如果小伙伴

【嵌入式移植】5、U-Boot源码分析2—make nanopi_neo2_defconfig
U-Boot源码分析2—make nanopi_neo2_defconfig 1 概述2 nanopi_neo2_defconfig3 编译过程分析3.1 编译目标3.2 scripts_basic3.2.1 prefix src定义3.2.2 PHONY3.2.3 __build3.2.4 fixdep3.3 obj=scripts/kconfig 1 概述 上一章中,对Ma
使用NanoPi NEO4进行rtsp拉流
使用系统:FriendlyDesktop系统 使用python进行编程,分别使用opencv与ffmpeg进行功能实现,折腾了挺长时间,代码很简单,主要是环境搭建。主要是python、opencv-python、ffmpeg-python、numpy之间的版本兼容,最终测得使用 python:3.6.9 opencv-python:4.5.4 ffmpeg-python:0.2.0 nu

NanoPi做深度学习开发(二)
在(一)中配置完成了深度学习的环境后,开始部署算法。然后在Pi上摄像头显示的检测图像不同步,由于在MAC上脚本是正常的,因此考虑是不是Pi的平台上处理器能力8行,于是掏出了Jetson Nano对同段代码运行,看一下画面效果如何。 嗯,效果是同步的。 李白曾经说过,如果眼睛看到的有用,那还要数据干什么? 因此,写了段代码验证一下相同尺寸图的情况下,不同的两个平台的测试时间如何。 太

Linux驱动开发07:【设备树】分析nanopi设备树,添加I2C子节点
介绍 本节简单介绍一下设备树,然后对nanopi的设备树文件进行分析。为了真正地体会设备树的用法,我们在现有设备树的I2C节点中尝试添加一个mpu6050的子节点,然后在nanopi的文件系统中尝试访问该节点,以验证是否添加成功。下一节会修改mpu6050的I2C驱动,使之支持该节点。 设备树简介 设备树文件是一种板级描述文件,该文件由一系列的节点和子节点组成,用于描述CPU内部资源和板
NanoPi PWM驱动(Nanopi-S2)
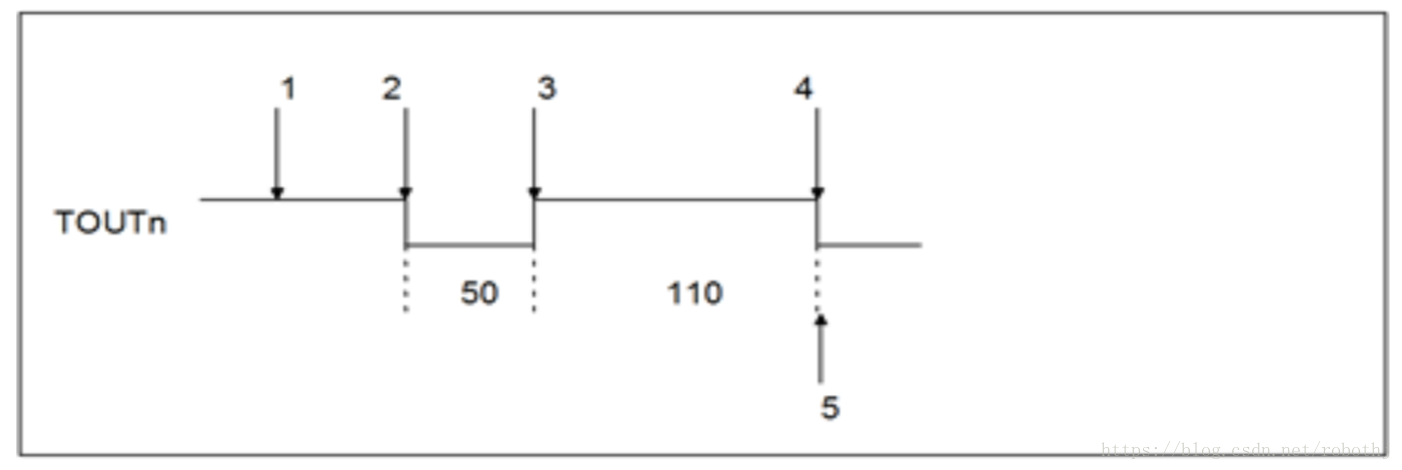
pwm相关手册说明 These timers can be used to generate internal interrupts to the ARM subsystem. In addition, Timers 0, 1, 2, and 3include a PWM function (Pulse Width Modulation) which can drive an external