本文主要是介绍为Nanopi m1交叉编译opencv,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
为Nanopi m1交叉编译opencv
一、下载交叉编译器
根据之前的博客进行
二、下载opencv和必要库
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
git clone https://github.com/opencv/opencv.git
cd opencv
三、进行编译
- 创建cmake文件
nano toolchain.cmake
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_SYSTEM_PROCESSOR arm)# 指定交叉编译器位置
set(CMAKE_C_COMPILER /opt/nanopi-toolchain/bin/arm-cortexa9-linux-gnueabihf-gcc)
set(CMAKE_CXX_COMPILER /opt/nanopi-toolchain/bin/arm-cortexa9-linux-gnueabihf-g++)# 指定系统根目录(sysroot),这是必需的以便编译器找到正确的库和头文件
set(CMAKE_FIND_ROOT_PATH /opt/nanopi-toolchain/arm-cortexa9-linux-gnueabihf/sys-root)
- 创建build文件
mkdir build
cd build
- 创建cmake指令
这里将opencv的编译install输出放到了output文件夹中
cmake -D CMAKE_BUILD_TYPE=Release \-D CMAKE_INSTALL_PREFIX=../output \-D BUILD_SHARED_LIBS=ON \-D WITH_JPEG=ON \-D CMAKE_TOOLCHAIN_FILE=../toolchain.cmake \-D BUILD_EXAMPLES=OFF \-D WITH_IPP=OFF \-D WITH_TBB=OFF \-D BUILD_TESTS=OFF \-D BUILD_PERF_TESTS=OFF \-D ENABLE_NEON=ON \-D ENABLE_VFPV3=ON \-D CMAKE_C_FLAGS="-std=gnu99" \-D CMAKE_CXX_FLAGS="-std=c++14" \-D BUILfD_opencv_python2=OFF \-D BUILD_opencv_python3=OFF \-D BUILD_opencv_java=OFF \-D WITH_OPENCL=OFF \-D WITH_CUDA=OFF \-D WITH_GTK=OFF \-D WITH_VTK=OFF \-D BUILD_opencv_gapi=OFF .. # 禁用G-API模块
- make编译
make -j12
- 错误后的处理
如果编译错误,可通过以下指令删除build中的文件
# cd build
rm -rf *
- 编译安装
由于修改了-D CMAKE_INSTALL_PREFIX=../output,因此编译安装的文件输出到了output文件夹中
sudo make install
四、进行scp传输到M1
- 进入output文件夹,使用scp发送这两个文件夹中的内容到m1
cd ../output
scp -r lib/* pi@192.168.10.197:/usr/local/lib/
scp -r include/* pi@192.168.10.197:/usr/local/include/
- 问题处理:如果显示没有权限,则可以通过一个temp文件夹进行转存
五、进行测试
- 在nano pi m1中写一个
test_opencv.cpp文件
#include <opencv2/opencv.hpp>
#include <iostream>int main() {// 替换下面的路径为一个实际的图片文件路径cv::Mat img = cv::imread("/home/pi/head.png", cv::IMREAD_COLOR);if (img.empty()) {std::cerr << "Could not open or find the image." << std::endl;return -1;}// 如果在具有图形界面的系统上运行,使用以下代码显示图片cv::imwrite("/home/pi/output.jpg", img);return 0;
}
- 进行编译
g++ test_opencv.cpp -o test_opencv `pkg-config --cflags --libs opencv4`
- 测试
./test_opencv # 可以看到生成一个output.jpg文件
六、交叉编译含opencv代码
- 主机弄一个标准的cpp工程。包含src、include、build文件夹
- CMakeList.txt文件内容如下:
cmake_minimum_required(VERSION 3.10)
project(t_cv)# 设置C++标准
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)# 添加include目录
include_directories(include)# 指定交叉编译工具链
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_SYSTEM_PROCESSOR arm)# 设置交叉编译器路径
set(CMAKE_C_COMPILER /opt/nanopi-toolchain/bin/arm-linux-gcc)
set(CMAKE_CXX_COMPILER /opt/nanopi-toolchain/bin/arm-linux-g++)# 查找OpenCV包
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})# 添加源代码文件
file(GLOB SOURCES "src/*.cpp")
add_executable(t_cv ${SOURCES})# 链接OpenCV库
target_link_libraries(t_cv ${OpenCV_LIBS})# 设置输出文件夹为 'output',没有用
#set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${CMAKE_BINARY_DIR}/output)
#set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${CMAKE_SOURCE_DIR}/output)
- main.cpp文件内容如下,一个是拍照片的,一个是保存png的:
#include <opencv2/opencv.hpp>
#include <iostream>int main() {// 打开默认相机cv::VideoCapture cap(1); // 0是默认相机的设备ID。如果不起作用,尝试更换ID。if (!cap.isOpened()) {std::cerr << "Error: Couldn't open the camera.\n";return -1;}cv::Mat frame;std::cout << "Starting camera...\n";// 从相机捕获一帧cap >> frame; // 或者使用 cap.read(frame);if (frame.empty()) {std::cerr << "Error: Couldn't capture an image.\n";return -1;}// 保存图像if (!cv::imwrite("/home/pi/captured_image.png", frame)) {std::cerr << "Error: Couldn't save the image.\n";return -1;}std::cout << "Image saved as /home/pi/captured_image.png\n";// 释放相机cap.release();return 0;
}// #include <opencv2/opencv.hpp>
// #include <iostream>
// using namespace std;
// int main() {
// // 替换下面的路径为一个实际的图片文件路径
// cv::Mat img = cv::imread("/home/pi/head.png", cv::IMREAD_COLOR);
// if (img.empty()) {
// std::cerr << "Could not open or find the image." << std::endl;
// return -1;
// }
// cout<<"starting"<<endl;// // 如果在具有图形界面的系统上运行,使用以下代码显示图片
// bool isWritten = cv::imwrite("/home/pi/output.jpg", img);
// if (!isWritten) {
// std::cerr << "Failed to write the image." << std::endl;
// return -1;
// } else {
// cout << "Image written successfully." << endl;
// }// cout<<"ok"<<endl;
// return 0;
// }
- 问题:拍照片和输出png图片都没有问题,但是生成jpg文件失败。
首先尝试在m1中安装如下库
sudo apt-get update
sudo apt-get install libjpeg62
前面的解决思路:上述通过在cmake中添加了如下对jpeg的支持,应该就解决了,上面已经添加了
-D BUILD_SHARED_LIBS=ON \
-D WITH_JPEG=ON \
- 问题:交叉编译的主机,显示#include <opencv2/opencv.hpp>错误找不到源。修改方式就是添加对应的源即可
解决:在如下出问题的地方,电机快速修改,提示修改配置,然后添加对应的路径即可
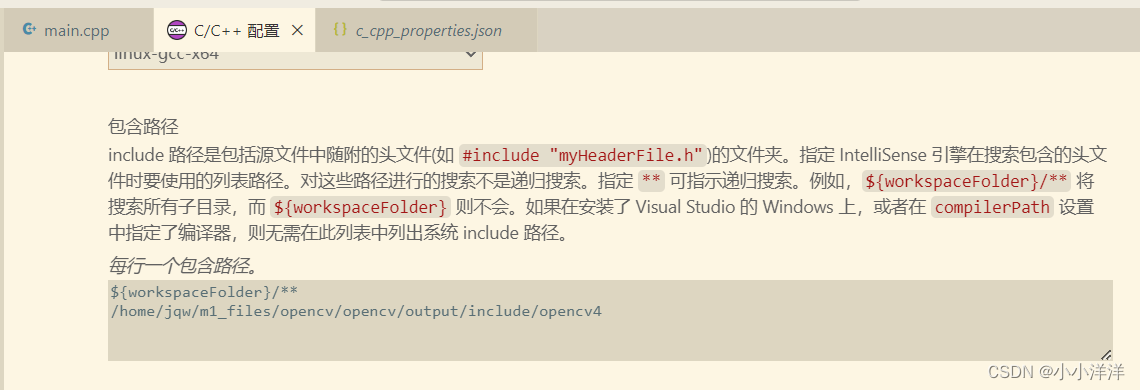
图形化修改界面的内容如下
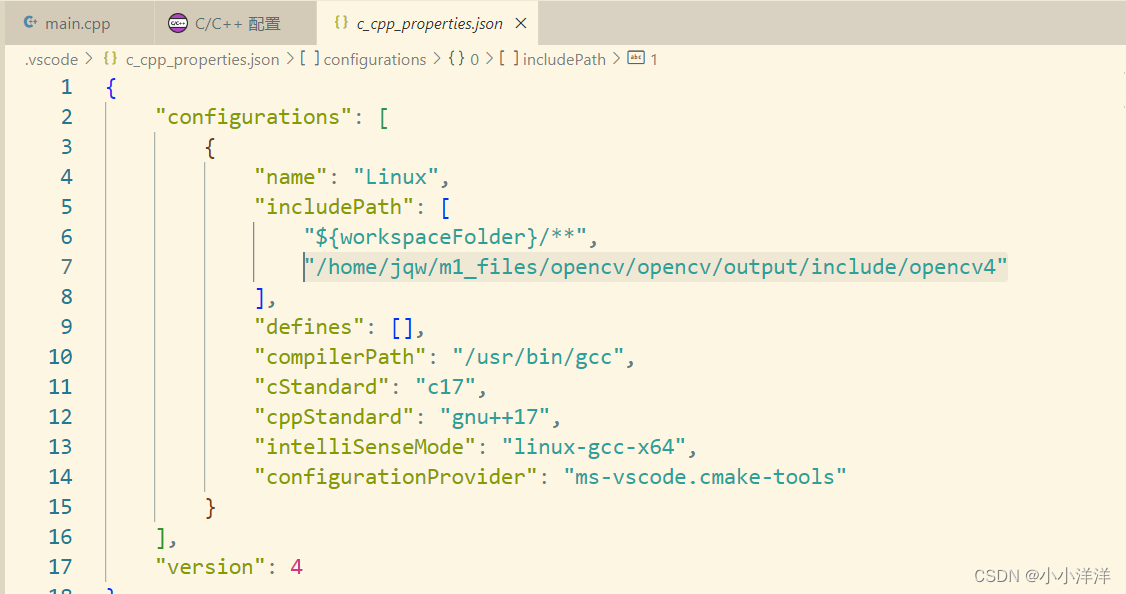
手动修改界面的内容如下
这篇关于为Nanopi m1交叉编译opencv的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







