mono专题

C#(或者说.NET/Mono)能做的那些事
不做语言之争,只陈述事实: 1、桌面软件 不仅是在Windows上,有了开源的Mono,在Apple Mac和Linux(如:Ubuntu)上也有C#的施展天地。并且还可以通过mkbundle工具让C#程序脱离Mono框架在Mac/Linux上运行,就像直接用C/C++编译的程序。 2、Web开发 除了可以基于ASP.NET开发大型网站,在Windows/Linux/FreeBS

Reactor Mono应用
使用案例 创建Mono 使用静态工厂方法创建Mono import reactor.core.publisher.Mono;public class MonoExample {public static void main(String[] args) {// 创建一个包含值的MonoMono<String> monoWithValue = Mono.just("Hello, Reactor
Ubuntu-Supervisor(Dotnet、java、mono)开机自启守护程序(整合)
前言 文章中介绍了如何在 Docker 容器中部署我们的 asp.net core 应用程序,本篇主要是怎么样为我们在 Linux 或者 macOs 中部署的 asp.net core、java、mono程序创建一个守护进程,来保证我们的程序在异常或者是电脑重启的时候仍然能够正常访问。 如果你以后用准备使用 asp.net corejavamono来开发项目的话,程序并且
在java中使用Reactor 项目中的一个类Mono,用于表示异步单值操作
Mono 是 Reactor 项目中的一个类,用于表示异步单值操作。Reactor 是一个响应式编程库,广泛应用于 Java 中的异步编程和非阻塞 I/O 操作。Mono 可以类比为一个可能(或将来)包含零个或一个值的异步计算结果。与 Flux(另一个 Reactor 类,表示多个值的异步流)不同,Mono 专注于单值或空结果的处理。下面详细讲解 Mono 的用法和常见操作。 1. 创建 Mono
JetBrains Mono字体下载及安装
百度云字体下载 提取码:zida 1.mac 安装 选择文件夹中的所有字体文件,然后双击它们。点击“安装字体”按钮。 2.windows 安装 选择文件夹中的字体文件,右键单击其中任何一个,然后从菜单中选择“安装”。 3.linux 安装 将字体解压缩为〜/ .local / share / fonts(或/ usr / share / fonts,以在系统范围内安装字体)并执行

Ubuntu 16.04 下 VINS-Mono 的安装和使用(RealSense ZR300)
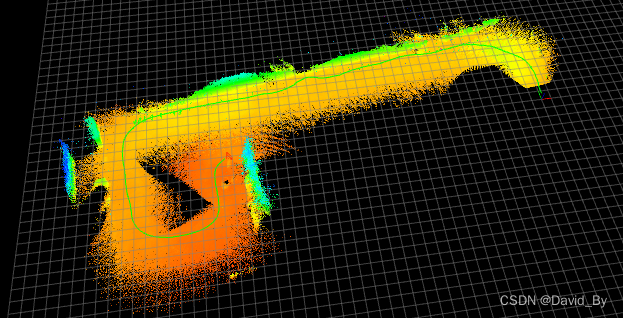
Overview 欢迎访问 https://spatial-ai.net/vinsmono-zr300-run.html, 持续更新 本文介绍在 Ubuntu 16.04(ROS Kinetic)的PC平台上使用 RealSense ZR300 的 fisheye camera (FOV: 100x133) + IMU 运行 我对VINS-Mono的改版 cggos/vins_mono_cg。

C#与.net与mono三者关系
.NET是微软的一个开发平台,简言之相当于Java的jdk,即最基础的开发包,最基础的框架。 Java开发首先安装jdk,而C#开发首先安装.NET。 Java开发借助开发工具eclipse或者idea,C#开发借助开发工具visual studio或者visual studio code。 Java是sun公司的编程语言,C#是微软的编程语言。 Java可以跨平台,微软也希望C#能够跨平台但是却

VINS-Mono 论文解读(IMU预积分残差+Marg边缘化)
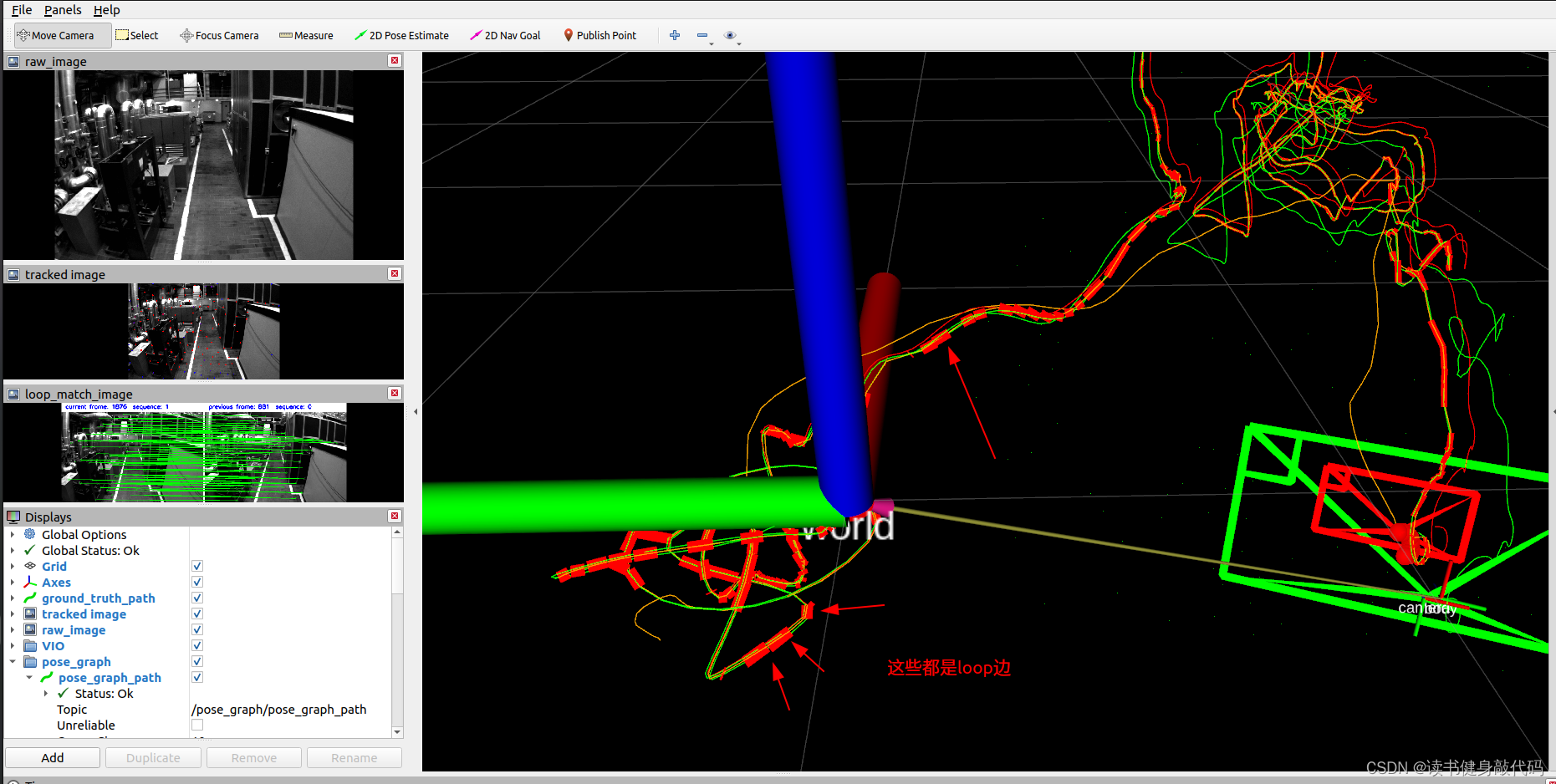
目录 VIO引出原因: 融合方案: 本文贡献: 0、总体框架 0.1 数据预处理(IMU预积分见标题1) 0.2 初始化 A.滑动窗口(Sliding Window)纯视觉SfM B. 视觉惯性校准(IMU预积分与视觉结构对齐) 0.3 紧耦合后端非线性优化(IMU约束+视觉约束+闭环约束) A 公式 B IMU残差 C 视觉残差 D 边缘化 Marginalizat
Spring WebFlux Mono 未按预期执行
在使用 Spring WebFlux 和 Mono 类型时,若发现 Mono 上的操作(如 subscribe() 方法)未按预期执行,可能由以下几个原因导致: 异步执行与同步等待: Mono 是一种代表未来单一值的异步序列。当调用 subscribe() 时,不会立即执行 Mono 中的逻辑,而是注册了一个订阅者,实际的处理将在后台线程(如 Reactor 的调度线程)中异步进行。如果您期望立

TWaver MONO模板库新鲜出炉 精彩纷呈
MONO Design在线3D建模平台网站, www.mono-design.cn,开发组的成员们已经开始紧锣密鼓的 对这个平台进行内测。在之前的文章里,我们提到用户可以获得多种多样的TWaver官方模型库, 现在已经新鲜出炉,让我们擦亮眼睛,一睹为快! 模板图库闪耀登场…TWaver MONO Design模板库中,各式各样的办公桌、椅子等,快速拖拽,创意摆放,分分钟创建办公室工作场景。下面是
TWaver MONO模板库新奇出炉 精彩纷呈
MONO Design在线3D建模平台站点, www.mono-design.cn,开发组的成员们已经開始紧锣密鼓的 对这个平台进行内測。 在之前的文章里,我们提到用户能够获得多种多样的TWaver官方模型库, 如今已经新奇出炉,让我们擦亮眼睛。一睹为快。 模板图库闪耀登场… TWaver MONO Design模板库中,各式各样的办公桌、椅子等,高速拖拽,创意摆放,分分钟创建办公室工作场
unity3d使用Mono.Xml读取xml
unity3d读取xml有好几种方式,最简单是直接利用c#读取xml,但是项目打包可能有点大。另外两个是利用其他轻量级xml库来实现,如Mono.Xml、XMLParser。Mono.Xml是c#写的,XMLParser是js写的。文章主要说明Mono.Xml的用法。 首先,定义一个xml文件,如下: <?xml version="1.0" encoding="UTF-8" standa
VINS-MONO拓展1----手写后端求解器,LM3种阻尼因子策略,DogLeg,构建Hessian矩阵
文章目录 0. 目标及思路1. 非线性优化求解器2. 基于VINS-MONO的Marginalization框架构建Hessian矩阵2.1 estimator.cpp移植2.2 solve.cpp/preMakeHessian()2.3 solve.cpp/makeHessian() 3. solve.cpp/solveLinearSystem()求解正规方程4. 更新状态5. 迭代求解6
VINS-MONO代码解读3----vins_estimator(鲁棒初始化部分)
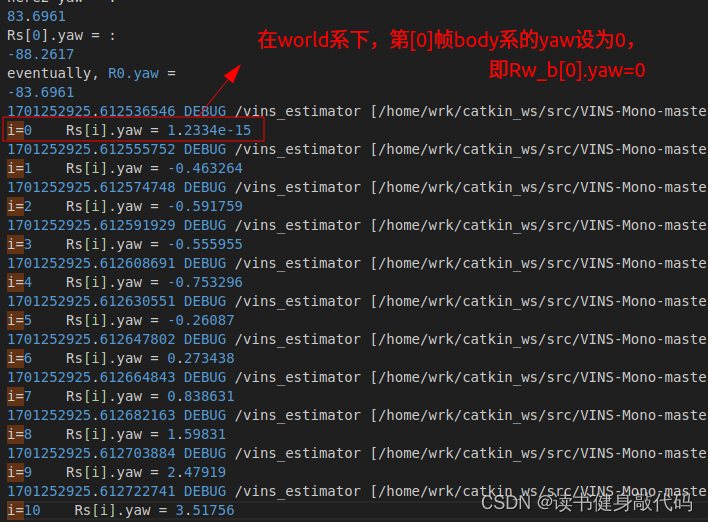
文章目录 0. 前言1. 旋转约束标定旋转外参Rbc1.1 八点法求取relative pose1.2 **旋转约束和旋转residual的构建**1.3 **左乘右乘的构建**1.4 **系数矩阵A的构建**1.5 鲁棒核函数1.6 q c b q_{cb} qcb 的求解 2. initialStructure()2.1 check IMU可观性(激励是否足够)2.2 构建并求解gl

VINS-MONO理论学习---紧耦合后端非线性优化
基于滑动窗的紧耦合后端非线性优化:将视觉约束、IMU约束、闭环约束放到一个大的目标函数中进行非线性优化,求解出滑动窗口中所有帧的PVQ、bias等。 在视觉约束和IMU约束中,基本思想是找到优化状态向量,然后通过视觉残差和IMU测量残差分别对状态向量求导,获得视觉和IMU预积分的Jacobian和协方差矩阵。 一、VIO残差函数的构建 1、需要优化的状态向量: 状态向量包括滑动窗口内的所有相
七、VINS-mono 代码解析——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化
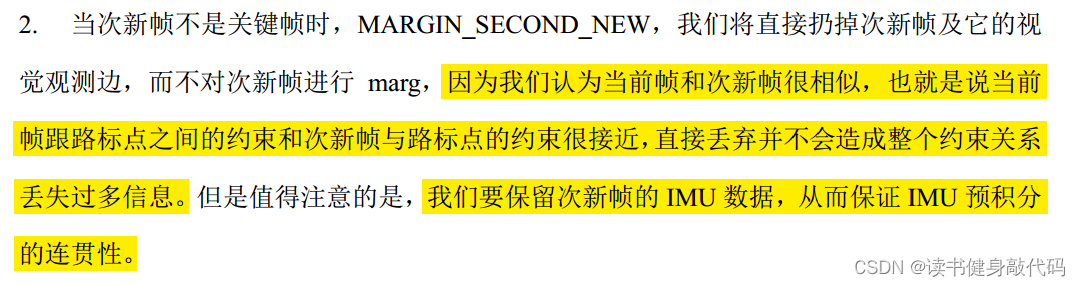
文章目录 前言紧耦合后端非线性优化系统框架一、VIO中的状态向量与代价函数1、需要优化的状态向量:2、目标函数为:二、视觉约束1.视觉重投影误差residual2、优化变量3、Jacobian4、协方差三、IMU约束1、残差:2、优化变量:3、IMU测量残差公式推导4、残差对状态量的Jacobian5、残差对状态量的协方差四、基于舒尔补的边缘化1、论文部分2、基本公式3、舒尔补4、marg后

VINS-Mono 理论详细解读——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化
预积分和后端优化IMU部分** https://blog.csdn.net/weixin_44580210/article/details/93377806 本讲是VINS最核心部分了,前面经历了 1)视觉跟踪feature_tracker、IMU预积分integrationBase类; 2)初始化中SFM纯视觉估计滑动窗中所有帧的位姿和3D路标点深度、SFM与IMU预积分松耦合对齐求解初始化

VINS-Mono理论学习——后端非线性优化
前言 本文主要介绍VINS状态估计器模块(estimator)在完成了系统初始化后,对视觉与IMU信息进行基于滑动窗口的紧耦合过程中所用到的非线性优化理论。这部分对应论文第六章(VI. TIGHTLY-COUPLED MONOCULAR VIO),并参考了崔博的《VINS论文推导与代码解析》、深蓝学院的VIO课程内容。主要想对目标函数中视觉残差和IMU残差,以及对应的雅可比、协方差进行推导。

SLAM算法VINS-MONO安装运行介绍
说明:把资料放在这里,主要是因为github经常上不去,速度慢。如果网络申通的话大家还是去官网看资料比较方便,这个贴子本身没什么价值。同时这个贴子会持续更新。 这里是安装在Ubuntu18.04,通常是ROS melodic。 Ubuntu20.04上ROS noetic有些小问题,不过都很容易解决。 关于ceres-solver和VINS-mono在Ubuntu20.04上的特别说明

开源跨平台.NET框架Mono 4.0发布!
跨平台,开源.NET框架Mono 4.0正式发布,这是首个包含来自微软开源.NET代码的版本,也是第一个缺省启用C# 6.0的Mono版本。 发布注记详情可参见:http://www.mono-project.com/docs/about-mono/releases/4.0.0/
VINS-MONO代码解读5----vins_estimator(marginalization部分)
文章目录 0. 前言1.1 Marginalization Pipiline 1. marg factor构建1.1 变量及维度理解1.2 IMUFactor1.3 ProjectionTdFactor(ProjectionFactor)1.4 MarginalizationFactor( e p e_p ep推导更新,FEJ解决的问题)1.4.1 先验残差的更新1.4.2 先验Jacob

VINS-MONO阅读记录
VINS是VIO研究中一个相当经典的架构,现在来读一读这篇论文 有一些在阅读过程中自己提出的问题,会慢慢解决掉 Abstract VINS系统由相机和低成本的IMU组成,最大的挑战在于没有直接的距离测量手段,这直接导致了初始化、外部校准、非线性优化上的问题。VINS则是一个鲁棒的,多种用途的系统。故事从估计器的初始化和失败恢复讲起。使用紧耦合的,基于非线性优化的方法来获得高准确度的视觉惯性里程
官方Mono使用的GC方式:SGen GC
Simple Generational Garbage Collection 简称 SGen GC, 是相比Boehm GC(贝姆GC)更为先进的一种GC方式。官方Mono在2.8版本中增加了SGen GC,但默认的仍是Boehm GC。3.2版本之后,Mono正式将SGen GC作为默认GC方式。 SGen GC官方文档 与之前提到过的收集器类似,SGen GC也将堆内存分为初生代(Nurse
移植 ASP.net 项目到 Mono 的问题报告
今日将负责的一个 ASP.net 项目正式交付给客户,想起了一只猴子来,一只叫“mono”的猴子。 启动 Linux,用 mono(1.0.0) 重新编译一遍这个项目,然后启动 XSP(mono 的 Web 服务器),打开 Mozilla 浏览器打开页面,不好,界面怎么全是乱码而且元素位置也有些乱了。心想这可能是系统配置问题,便把 Web.config 文件内的 <globalizati
realsense d455 运行vins-mono,vins-rgbd
GitHub - STAR-Center/VINS-RGBD https://github.com/HKUST-Aerial-Robotics/VINS-Mono 读取realsense的内外参,也可以自己标定。 保证realsense-view安装成功,读取方法: 1.rs-enumerate-devices -c > realsense.txt Extrinsic from "Col
Mono环境下不支持Encoding.GetEncoding(GB2312)的解决方法
转载自:http://www.cnblogs.com/muse/articles/1756821.html mono-locale-extras 可以先写一句测试代码: EncodingInfo[] enc = Encoding.GetEncodings(); 在这行上设置一个断点,可以浏览到所有可用的编码名称/CodePage。这时看到936——也就是GB231