lss专题

BEV学习---LSS-1:论文原理及代码串讲
目前在自动驾驶领域,比较火的一类研究方向是基于采集到的环视图像信息,去构建BEV视角下的特征完成自动驾驶感知的相关任务。所以如何准确的完成从相机视角向BEV视角下的转变就变得由为重要。目前感觉比较主流的方法可以大体分为两种: 1、显式估计图像的深度信息,完成BEV视角的构建,在某些文章中也被称为自下而上的构建方式; 2、利用transformer中的query查询机制,利用BEV Query
LSS (Lift, Splat, Shoot)代码解析
文章目录 论文研究背景算法实现过程梳理一、相关参数设置二、模型相关参数三、算法前向过程 论文研究背景 LSS是一篇发表在ECCV 2020上有关自动驾驶感知方向的论文,具体子任务为object segmentation and map segmentation。论文和官方repo如下: 论文:https://link.zhihu.com/?target=https%3A//ar
【nuScenes SOTA】EA-LSS:Edge-aware Lift-splat-shot Framework for 3D BEV Object Detection个人解析
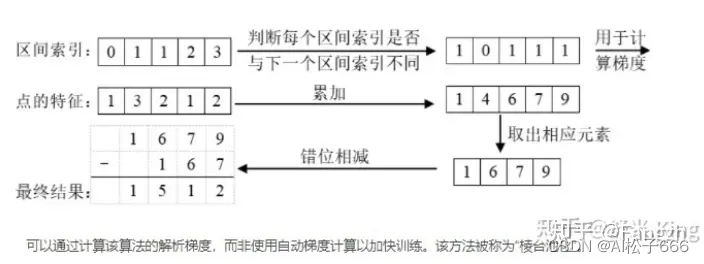
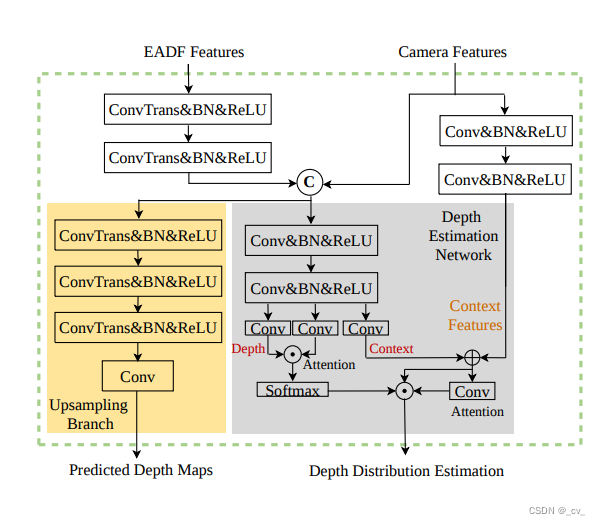
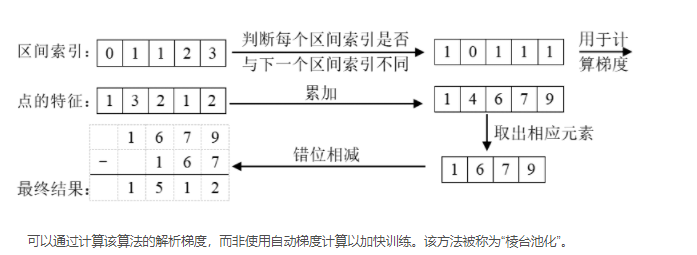
文章目录 重点Fine-grained Depth ModuleEdge-aware Depth Fusion Module 重点 这篇文章最主要就是提出来两个模块,如上图所示,一个是FGD Module(Fine-grained Depth Module),另一个是EADF Module(Edge-aware Depth Fusion Module) Fine-g
【LSS】Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
【LSS】Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D 1 摘要 现有的自动驾驶车辆的主要目标是从多个传感器抽取语义信息,并将这些语义信息融合成一个 BEV 坐标系下的特征图,然后进行运动规划。本文作者提出了一个方法,该方法将任意多的相机数据转化成B
【BEV感知 LSS方案】Lift-Splat-Shoot(LSS)
前言 LSS全称是Lift-Splat-Shoot,它先从车辆周围的多个摄像头拍摄到的图像进行特征提取,在特征图中估计出每个点的深度,然后把这些点“提升”到3D空间中。 接着,这些3D信息被放置到一个网格上,最后将这些信息“拍扁”到一个平面视图上,形成BEV特征图。 Lift,是提升的意思,2D → 3D特征转换模块,将二维图像特征生成3D特征,涉及到深度估计。Splat,是展开的意思,3
![[Vue warn]: Error in callback for watcher “lss“: “TypeError: Cannot read properties of undefined](https://img-blog.csdnimg.cn/bcdca3fece38425e96d2645c42f84fb2.gif#pic_center)
[Vue warn]: Error in callback for watcher “lss“: “TypeError: Cannot read properties of undefined
文章目录 问题描述问题解决方法 问题描述 在练习本地资源存储的时候,需要将数据存放在浏览器内,存放的时候需要使用到监视属性,实现每次更新都重新存储。 于是在操作过程中遇到了这个类型的问题。现已解决 [Vue warn]: Error in callback for watcher "lss": "TypeError: Cannot read properties o
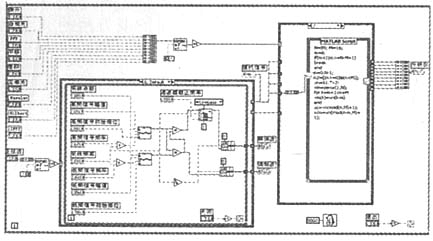
lss局部自相关matlab,基于LabVIEW和MATLAB的频谱分析仪设计
固《计量与洲斌桂术)2007牟第34卷第9期 基于LabVIEW和MATLAB的频谱分析仪设计 DesignontheVirtualSpectrumAnalysisInstrumentBasedonLabVIEWandMATIAB 陈华丽 (武汉科技大学,湖北武汉430081) 摘要:介绍丁基于LaJ)VIEW和MATLAB的虚拟频藩分析仪的设计过程。重点阐述了基于LabVIEW的前赍用户界面设