icra专题

ICRA 2024:北京工业大学马楠教授联合中科原动力公司推出番茄采摘自主机器人AHPPEBot,实现32.46秒快速准确采摘
当前,农业生产正深受劳动力短缺困扰,这一现状对生产规模的进一步拓展构成了严重制约。为了突破这一瓶颈,实施自动化已成为提升农业生产力的关键途径,这也使得机器人采收技术备受关注。 现今的机器人采收系统普遍采用先进感知方法,并结合精密收获程序来完成作业。具体而言,它们借助监督学习技术,精准地将作物成熟度划分为可收获与不可收获两类。在检测完毕后,系统会利用分割模型捕捉目标作物的点云数据,进而拟合出球

【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024
前言 本文介绍激光雷达与相机进行多层次融合,包括数据级融合、特征级融合和BEV级融合。 融合后的BEV特征可以支持不同的任务头,包括语义分割、实例编码和方向预测,最后进行后处理生成高清地图预测,它是来自ICRA 2024的。 会讲解论文整体思路、模型框架、论文核心点、损失函数、实验与测试效果等。 论文地址:SuperFusion: Multilevel LiDAR-Camera Fusio
全网超全 | 机器人顶会ICRA 2021论文!终于有人找齐了!
ICRA2021都已经结束4、5个月了,ICRA 2022也截稿了,我带着千般好奇、万般期待,全网好一顿搜索(就怕有遗漏,搜索了一个周,还想尽各种方法),结果发现,我想太多了,还真就没有全乎的论文可以下载。 还不知道ICRA?看这个! ICRA作为世界范围内机器人、AI及自动化领域最具影响力的顶级国际学术会议之一,汇聚了全球的顶尖高校、企业人才、科研机构等。其中2021 ICRA一共收录了
Google机器人团队获ICRA 2023 机器人学习方向最佳论文奖:机器人实体控制的大语言模型程序
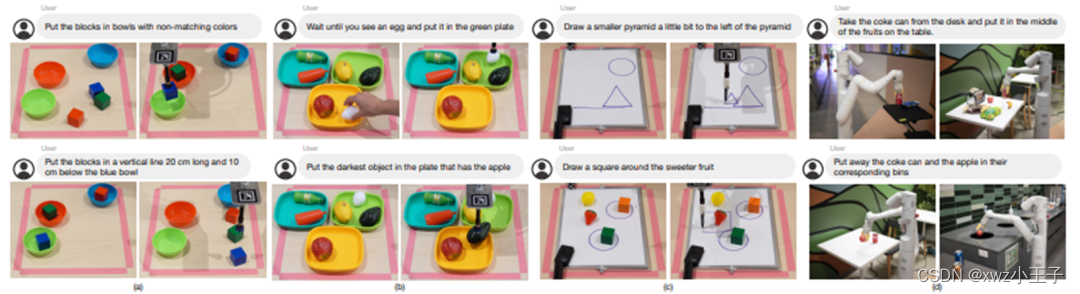
这篇论文主要讨论了大型语言模型(LLM)在机器人控制方面的应用。作者们指出,尽管LLM在理解和生成自然语言方面表现出色,但其在实际应用中,如机器人控制等领域的应用仍然有限。因此,他们提出了一种新的方法,即使用LLM编写代码来控制机器人的行为。 他们发现,编写代码的LLM在规划、策略逻辑和控制方面表现出色。这些模型可以被重新用于编写机器人策略代码,给出自然语言命令(格式化为注释)。策略代码可以表

【多传感器融合】BEVFusion: 多任务-多传感器融合框架 ICRA 2023
前言 BEVFusion其实有两篇, 【1】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework. NeurIPS 2022 | 北大&阿里提出 【2】BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation I
【论文阅读】ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks
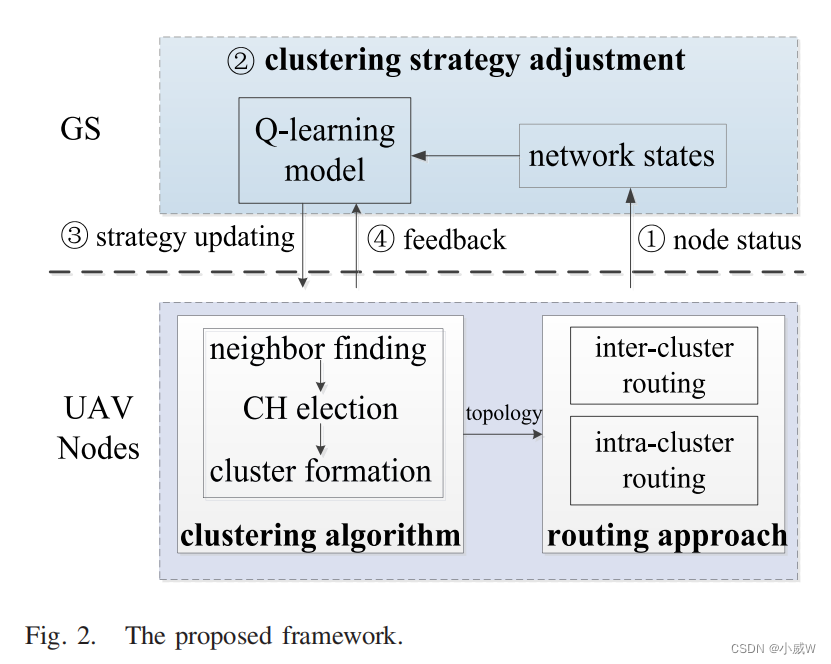
文章目录 论文基本信息摘要1.引言2.相关工作3.PROPOSED SCHEME4.实验和讨论5.总结补充 论文基本信息 《ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks》 《ICRA:无人机自组织网络的智能聚类路由方法》 Published in: IEEE Transactio
![[阅读笔记] 2019 ICRA - Coordinated multi-robot planning while preserving individual privacy](https://zhangruiyuan.oss-cn-hangzhou.aliyuncs.com/picGo/images/image-20211220200058157.png)
[阅读笔记] 2019 ICRA - Coordinated multi-robot planning while preserving individual privacy
🛣[阅读笔记] 2019 ICRA - Coordinated multi-robot planning while preserving individual privacy 本文介绍了一种隐私保护的协作多机器人路径规划方法,使用了安全计算几何、混淆电路、同态加密等密码学技术,实现了在不共享🙅🏻♀️机器人🤖规划路径的前提下的路径碰撞检测方法。 算法具体细节介绍见我的下一篇笔记:

机器人强化学习——Learning Collaborative Pushing and Grasping Policies in Dense Clutter(ICRA 2021)
1 简介 基于3D视觉联合学习平面推和6DOF抓取,采用Q-learning。 推和抓取使用两个独立的网络,通过采样器获得6-DOF抓取位姿。 2 方法 state:RGBD图像 action:行为基元选择(推、抓取)、末端的三维位置和旋转。 在push动作下,action由图像上二维的点和平面的旋转角构成,机械手在该点处沿旋转角方向推10cm。 如何push物体:Dur
ICRA 2023 | 首个联合暗光增强和深度估计的自监督方法STEPS
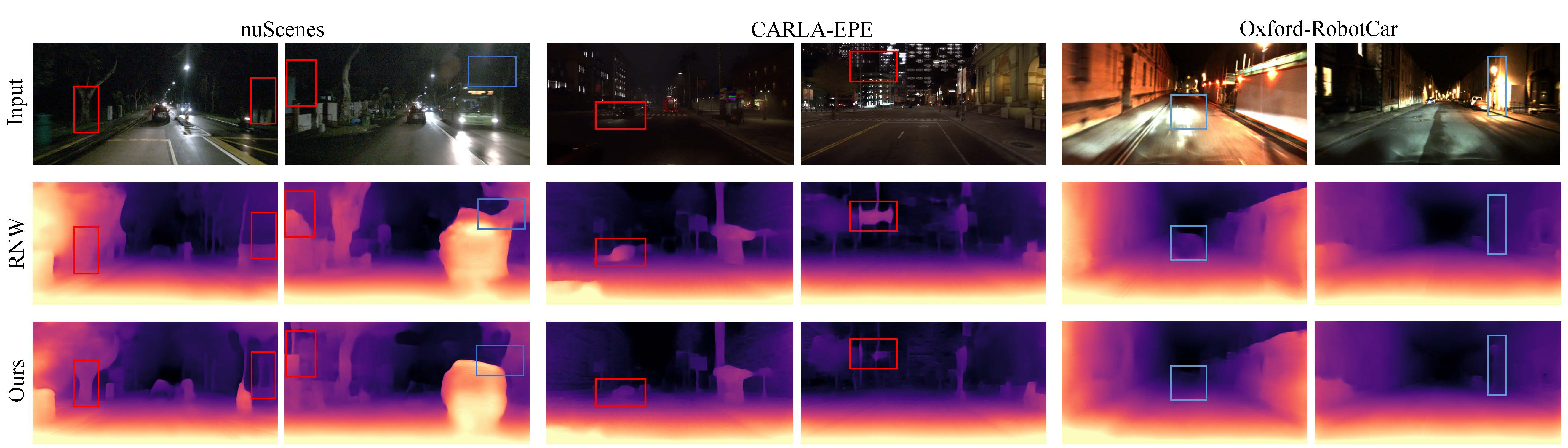
原文链接:https://www.techbeat.net/article-info?id=4629 作者:郑宇鹏 本文中,我们提出了STEPS,第一个自监督框架来联合学习图像增强和夜间深度估计的方法。它可以同时训练图像增强网络和深度估计网络,并利用了图像增强的中间量生成了一个像素级mask来抑制过曝和欠曝区域。通过大量的实验研究表明,我们的方法在这两种区域取得了更好的效果。此外,我们提出
vslam论文17:基于UWB测量的高效平面位姿估计(ICRA 2023)
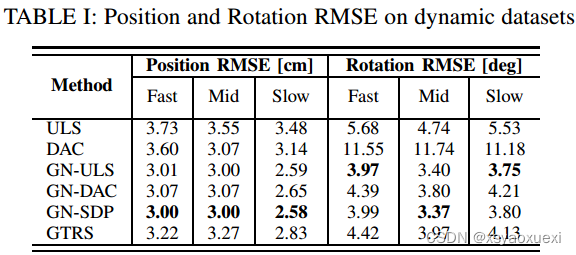
摘要 状态估计是自主系统的重要组成部分。集成超宽带(UWB)技术已被证明可以纠正长期估计漂移并绕过环路闭合检测的复杂性。然而,很少有机器人工作将超宽带作为一个独立的状态估计解决方案。 这项工作的主要目的是研究仅使用超宽带距离测量的平面姿态估计。我们证明了一个两步格式的优良性质,即我们可以通过一步的高斯-牛顿迭代使一个一致估计量渐近有效。基于这一结果,我们设计了GN-

ICRA 2021:Self-Supervised Person Detection in 2D Range Data using a Calibrated Camera(SSPD)
下方↓公众号后台回复“SSPD”,即可获得论文电子资源。 SSPD IntroductionII. RELATED WORKIII. GENERATING PSEUDO-LABELSIV. PERSON DETECTION WITH PSEUDO-LABELS 现有的问题: only a few annotated datasets are available for tra

ICRA 2022最佳论文出炉:美团无人机团队获唯一最佳导航论文奖
©作者 | 张倩 来源 | 机器之心 在刚刚结束的 ICRA 2022 上,来自美团无人机团队的研究人员拿到了导航领域的年度最佳论文。 国际机器人技术与自动化会议 ICRA 2022 于 5 月 23 日至 5 月 27 日在美举办,这是 Robotics(机器人学)领域最顶级的国际会议之一。今年大会共收到 3344 份投稿,其中的 3263 份进入了审稿阶段,1428 篇被接收,接收率为 4