humble专题

USACO Section 3.1 Humble Numbers
题意: 已知一个集合S 由S的任意子集作为因子 可构造出一个数字 求 这些构造出的数字中第k大的数字是多少 思路: 拿到这题就被“数字不是很多而且比较连续暴力枚举就好”这个思路迷惑了 果断TLE… 跪了一次后想到通过bfs构造可取 这时用了queue维护bfs 用priority_queue维护答案(大顶堆 内部最多k个数字) 用set判重复(5*2=2*5) 写

Humble Numbers 丑数
http://acm.hdu.edu.cn/showproblem.php?pid=1058 很多人都说这道题是水题,但对于我来说还是很有用的,它教会我在处理这种问题的时候为了节省时间我们可以先把所有的满足范围的丑数找出来,再进行下面的操作。和去年吉林省省赛那道素数题相似。 #include<iostream>#include<cstring>#include<algorithm>#in
树莓派 ubuntu22.04 meta安装 ros2-humble
可直接参考: https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html 设置区域设置 locale # check for UTF-8sudo apt update && sudo apt install localessudo locale-gen en_US en_US.UTF-8sudo

Pycharm/Dataspell中使用jupyter导入ro humble包
配置ros humble对应python包路径文件 首先在~/.local/lib/python3.10/site-packages目录下新建一个.pth文件,如下图所示。 将对应的ros humble的python包的路径配置在上述文件中,一行放置一个路径,对应的路径如下图所示。 完成上述操作后,使用pycharm或者dataspell新建项目时,需要勾选inherit global s
Ubuntu22.04 + ROS2 Humble的环境配置
Ubuntu22.04 + ROS2 Humble的环境配置 文章目录 Ubuntu22.04 + ROS2 Humble的环境配置(1) Set locale(2) Setup Sources(3)安装ROS2(4)检查是否成功安装 参考官方网站ROS2-Installation ROS2的各种版本及维护计划,可以参考ROS2-List of Distributions
Ubunt22.04 + ROS2 Humble的环境配置
Ubunt22.04 + ROS2 Humble的环境配置 文章目录 Ubunt22.04 + ROS2 Humble的环境配置(1) Set locale(2) Setup Sources(3)安装ROS2(4)检查是否成功安装 参考官方网站ROS2-Installation ROS2的各种版本及维护计划,可以参考ROS2-List of Distributions

UVa 443 / POJ 2247 Humble Numbers (4因子-丑数STL灵活运用)
443 - Humble Numbers Time limit: 3.000 seconds http://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&category=24&page=show_problem&problem=384 http://poj.org/problem?id=2247 A
HDOJ 1058 Humble Numbers解题报告【DP】
Humble Numbers题目详见http://acm.hdu.edu.cn/showproblem.php?pid=1058 开始拿到这个题目的时候还纠结了半天,英语很差的话这个题是不可能AC的。。而我就是其中之一。。。 Humber Number不用管它啥意思,就是一类定义的数而已。如果一个数的质因数(素因数)仅仅是2、3、5 or 7的话那就被称为Humber Number。特殊的1也在
ROS2 Humble学习笔记 (2)
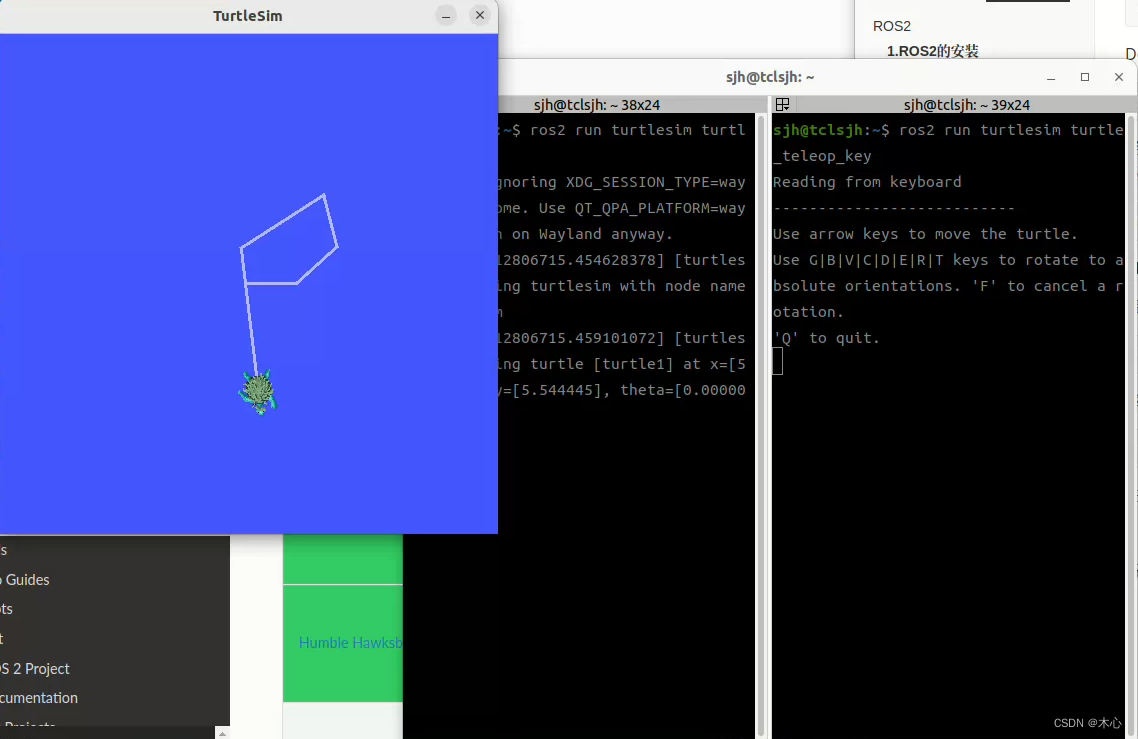
本文发表于个人的github pages。因csdn本身显示插件和转载过程中导致显示不太友好。建议大家阅读原文。想查看完整内容,请移步到ROS2 Humble学习笔记2。 本文篇幅较长,可抽空按照章节阅读。本文只作为对入门教程的一种浮现和提升。 一、前言 在上一篇学习笔记中,我们学习ROS2的一些基本概念,主要是官方入门教程中的Beginner: CLI tools部分。现在我们继续学习Be
Ubuntu2204+ROS2(humble)+usb_cam内参标定
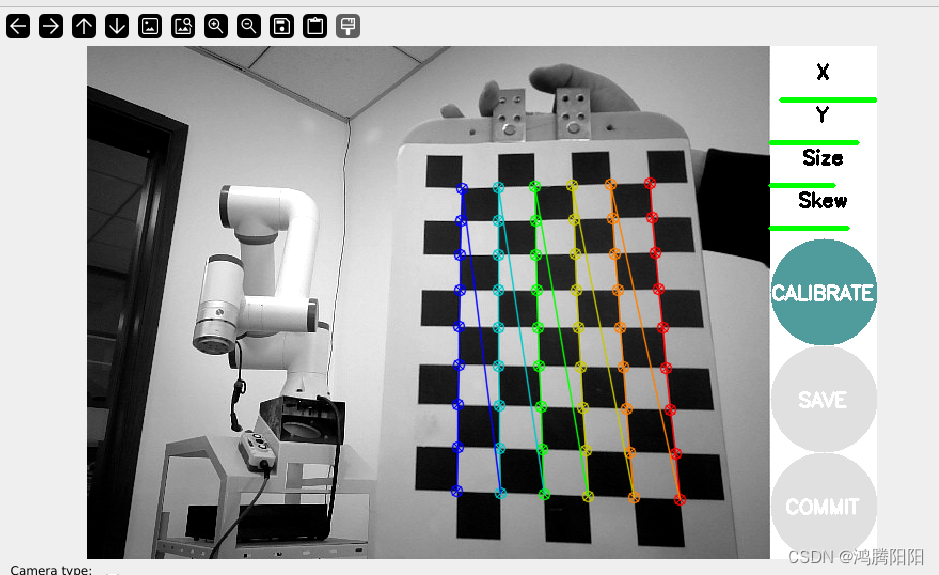
1、安装usb_cam包 sudo apt install ros-humble-usb-cam# 测试打开相机ros2 launch usb_cam camera.launch.py# 显示图像ros2 run image_view image_view image:=/camera1/image_raw 2、安装 camera_calibration sudo apt install
ROS 2 Humble (Ubuntu Jammy)安装配置
官方链接Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentation 问题1.更新源时报没有公钥的错误 sudo apt update Hit:1 https://mirrors.ustc.edu.cn/ubuntu jammy InRelease Hit:2 https://mirrors.ustc.edu.cn

The number of divisors(约数) about Humble Numbers
The number of divisors(约数) about Humble Numbers Problem Description A number whose only prime factors are 2,3,5 or 7 is called a humble number. The sequence 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 12, 1
ROS2 Humble学习笔记
本文发表与个人的github pages。部分内容未同步到这里。 想查看完整内容,请移步到ROS2 Humble学习笔记。 一、前言 2013年的时候已经接触ROS了,当时断断续续学习了一些ROS的基础知识。16年搬到深圳之后,也有幸参加过星火的一次关于ROS的一些活动。当时活动的主讲之一是CSDN上ROS知识传播界的大牛的古月和港中文的林天麟先生。然而,因为自己一直涉猎的是嵌入式领域,一直没
hud_1058 Humble Numbers
hud_1058 Humble Numbers 题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1058 题目原文: 题意: 该题就是让我们找出题意里所谓的“Humble Numbers”,根据题目的意思,‘Humble Numbers’指的是一个数的所有质因子必须由2,3,5和7组成,非质因子无要求,例如14,它的因子为1,2,
ROS2 galactic生成的bag包里的MarkerArray在humble下播放不正常
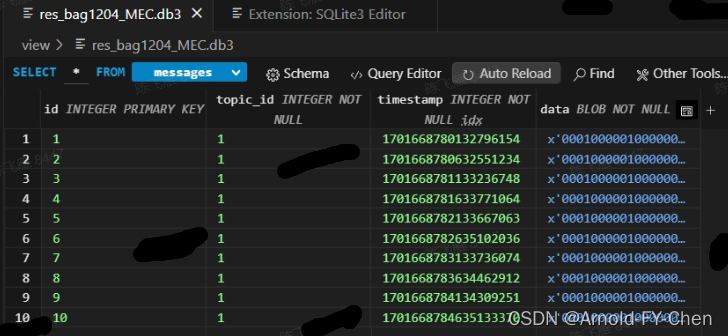
近期发现ROS2 galactic下生成的bag包在humble下回放时使用rviz可视化,bag里的点云可以正常看到,但是使用Marker和MarkerArray画的box却死活看不到,感觉很纳闷,看网上有人报告说foxy下生成的bag包在galactic下播放会报SQL错误,推断ROS2不同版本之间关于bag的实现可能有一些差异导致不兼容。 考虑道ROS2生成的bag包实际上是个sqlite
ROS2 galactic生成的bag包里的MarkerArray在humble下播放不正常
近期发现ROS2 galactic下生成的bag包在humble下回放时使用rviz可视化,bag里的点云可以正常看到,但是使用Marker和MarkerArray画的box却死活看不到,感觉很纳闷,看网上有人报告说foxy下生成的bag包在galactic下播放会报SQL错误,推断ROS2不同版本之间关于bag的实现可能有一些差异导致不兼容。 考虑道ROS2生成的bag包实际上是个sqlite
【ROS】ROS2-humble安装navigation2与使用
Part 0. 准备 安装gazebo sudo apt install ros-humble-gazebo-* 测试gazebo: ros2 launch gazebo_ros gazebo.launch.py Part 1. [安装] 直接安装Navigation2 下载与安装: sudo apt install ros-humble-navigation2sudo apt inst

ROS2 Humble 下接入velodyne VLP16 Lidar
1 硬件连接 网线连接。主机IP设置到192.168.1.xxx。 正确连接的话,用浏览器打开192.168.1.201可以接入Lidar管理页面,在管理页面设置主机IP,也可以设置为255.255.255.255进行广播。 2 用veloview测试数据 3 安装ROS2驱动 3.1 安装依赖 sudo apt install ros-foxy-diagnostic-updater s

ROS 2 Humble Hawksbill将于2022年5月发布
ROS 2 Humble Hawksbill应该是第一款走向成熟的ROS2长期支持版本(LTS)。 ROS 2目前各模块功能还在不断完善和修订,ROS 2 Humble Hawksbill是ROS2的第八个发行版。 March 21, 2022Alpha + RMW freezeApril 4, 2022FreezeApril 18, 2022BranchApril 25, 2022BetaM

谦卑篇(Be humble)//伟大是用卑微来换取的,任何时候都应该看清自己
1. 宇宙诞生138亿年,地球迄今经过了46亿个春秋,人生不过百年,//从生命科学的角度。 2. 蔡崇信:好的领导者是很谦卑的,他们会用谦卑雇佣来能力更强的人。// 从创业者的角度。 3. 《臣服实验》: 臣服生命之流,唯有谦卑,感谢生命本身的安排,感受那平静,感受那安详。 臣服不是“躺平”,不是消极,而是最深层次的积极,是允许生活做我们的指引者,活出人生本来应有的丰盈和