harmonic专题

turtlebot 测试 Gazebo Harmonic ROS Jazzy
源码移植后理论上支持所有Gazebo和ROS版本,但花费时间较多。 只推荐学习Gazebo 经典版和Gazebo Harmonic以及之后版本。 在中间的过渡版本,不推荐学习。 Gazebo经典版包括Gazebo 7 Gazebo 9 Gazebo 11。 Gazebo Harmonic 和 ROS2 jazzy 安装和测试-CSDN博客 Gazebo与ROS1、ROS2接口变迁-2

Gazebo Harmonic gz-harmonic 和 ROS2 Jazzy 思考题 建图和导航 SLAM Navigation
仿真 效果还挺好的。 SLAM建图 导航 …… 提示 这篇文档详细介绍了如何在ROS 2环境中使用SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)和Nav2(Navigation 2,ROS 2的导航框架)来让机器人一边构建环境地图一边进行导航。以下是对该文档的详细总结: 概述 文档主要面向ROS 2用户

Gazebo Harmonic 和 ROS2 jazzy 安装和测试
之前,提及使用CoppeliaSim_Edu_V4_7_0,那么备选Gazebo一定不能缺席! 使用大模型撰写移动机器人模拟器(CoppeliaSim、Gazebo、MORSE和Webots)的定量比较研究报告-CSDN博客 CoppeliaSim + Gazebo + ROS2 Jazzy 安装: 简洁: 179 sudo apt-get install lsb-r

Light OJ 1234 Harmonic Number 调和级数部分和
题目来源:Light OJ 1234 Harmonic Number 题意: 思路:没思路啊 这个是高数的东西 发散 n足够大时它无穷大 直接公式解 #include <cstdio>#include <cstring>#include <cmath>#include <string>#include <algorithm>#include <iostream>usi
影响哈默纳科Harmonic减速机使用寿命的5大因素
哈默纳科HarmonicDrive减速机以其轻量、小型、传动效率高、减速范围广、精度高等特点,被广泛应用于各种传动系统中。然而,尽管哈默纳科Harmonic减速机具有诸多优势,但其使用寿命仍可能受到多种因素的影响。 首先,环境因素对哈默纳科Harmonic减速机的使用寿命有着不可忽视的影响。如果减速机的工作环境超过了其设计的温度范围或空气湿度范围,或者应用于特殊环境,都可能导致其性能下降,进
什么是谐波减速机?日本Harmonic哈默纳科谐波减速机有哪些优点?
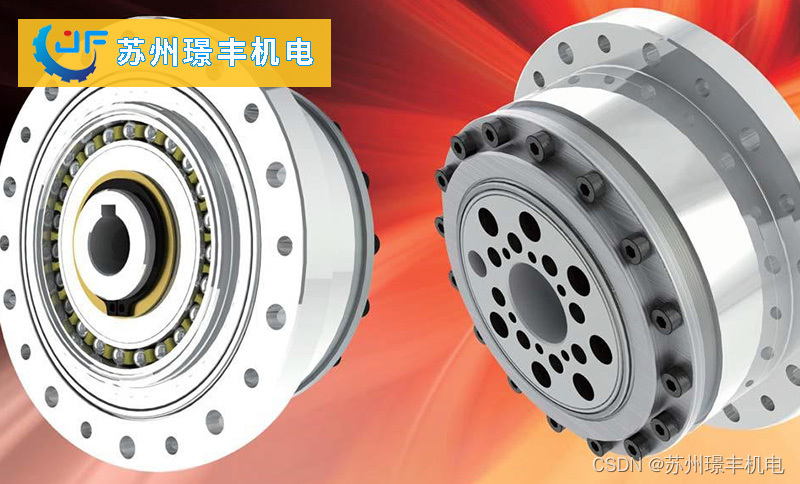
一、什么是谐波减速机? 谐波减速装置最早期被叫做“strain wave gearing”,直译过来为“应变波齿轮”。其后被HarmonicDrive Systems 公司大规模商业实用化后,经过二次翻译后,中文名称才将其称为“谐波齿轮传动”。 谐波减速机是一种广泛应用于自动化设备、机器人、精密仪器等领域的重要传动部件。谐波减速机是由刚轮、柔轮、波发生器三大核心构件组成,波发生器装配上柔性轴承
【璟丰机电】Harmonic哈默纳科减速机执行元件在各领域应用案例
1.火星探测车【帕萨维亚兰斯】 2021年2月,NASA最新的探测器「帕萨维亚兰斯」在火星上着陆。这个探测器的机械臂上使用了5个「HarmonicDrive®」。安装在机械臂前端的光谱仪、激光和相机,在火星有效温度零下56℃的严酷环境下精确定位。 2.人形机器人 机器人的手臂和脚上使用了「 HarmonicDrive® 」。下一代机器人被认为是无限接近人类的。 3.宇宙工业【Hay

哈默纳科Harmonic执行器在半导体CMP设备中的应用
SHA、FHA、RSF系列执行器是日本Harmonic公司的一款谐波减速机和伺服电机一体化的产品。HMA是大中空直驱力矩电机产品。 SHA系列执行器有6种尺寸可选,最大输出转矩为3419Nm,减速比范围11~161,单向定位精度≤30arcsec(1:80以上速比)。 FHA-C系列执行器4种尺寸可选,最大输出转矩达820Nm,减速比范围50~100,单向定位精度≤30arcsec。 RSF

libigl 网格harmonic参数化
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 网格的Harmonic参数化是一种常用的参数化方法,用于将三角形网格映射到二维平面上。Harmonic参数化的基本思想是利用调和函数在网格上的性质,将网格上的每个顶点映射到平面上的一个点,并保持一定的形状性质。 具体来说,Harmonic参数化的步骤如下: 选择边界条件: 首先,需要选择一组边界条件,即

VMMECH014_Harmonic Response of a Single Degree of Freedom System
ANSYS Workbench 单自由度系统的稳态响应 案例分析: 如下图所示,一个由四个杆连接而成的无质量弹簧和点质量共同组成模拟弹簧质量系统。其中杆1一端固定,在杆4另一端施加简谐力。 在下列情况下,使用模态叠加法(Mode-Superposition),求出频率范围为0至500 Hz时受力面上系统的Z向变形的频率响应。Solution intervals= 20。 · 情形一:阻尼系数 =
球面谐波函数 (Spherical harmonic function)分析实际颗粒形状公式推导及数值实现 Part 1
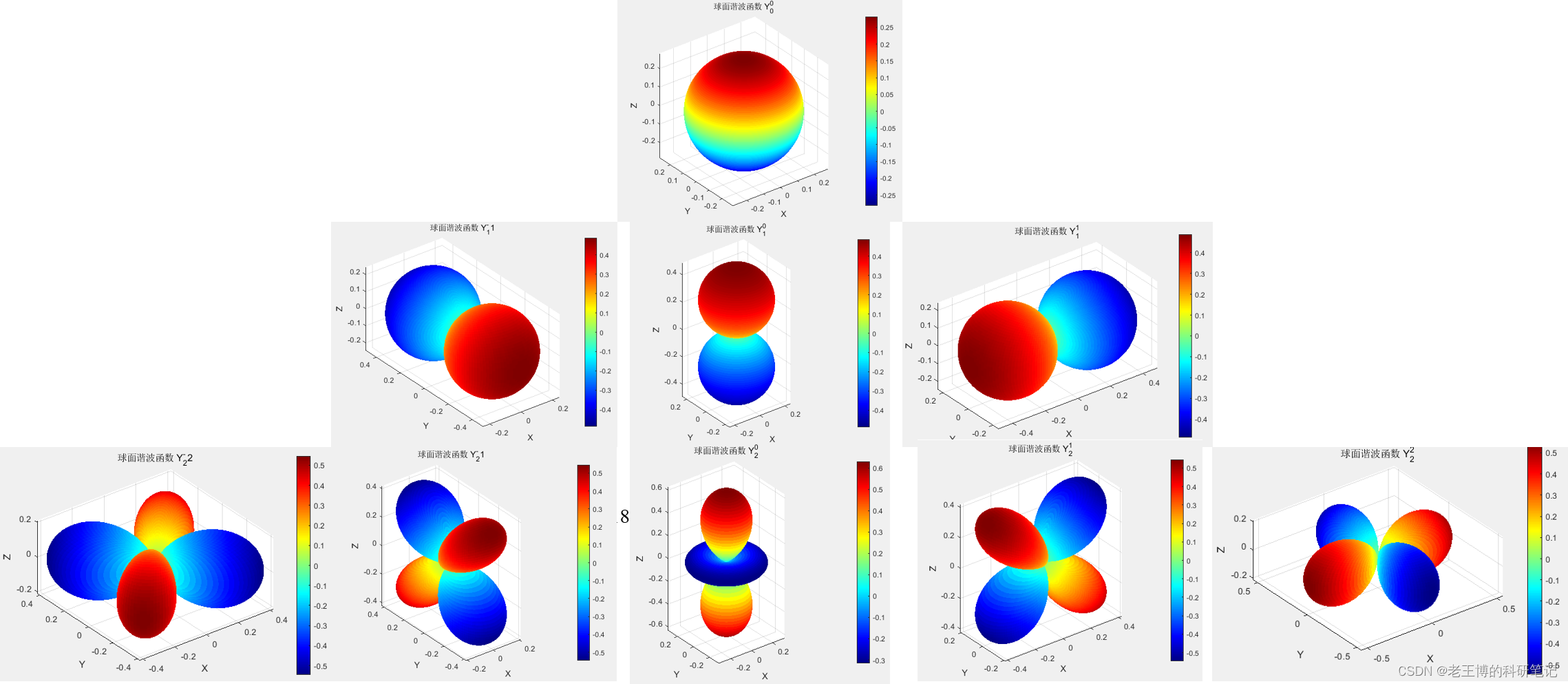
一、公式推导 球面谐波函数是一组定义在单位球上的基函数,是傅里叶展开式的一种;球面谐波函数最早应用于电磁场、核物理学、行星重力场计算,Garboczi (2002)最早基于该方法分析了混凝土集料的颗粒形状特性;展现出其对颗粒形状解析表征的强大能力。 球面谐波函数对颗粒形状分析主要原理是将颗粒的形状视作一个三维的解析表达式,并能够用球面谐波基函数的线性组合进行展
什么是谐波减速机?日本Harmonic哈默纳科谐波减速机有哪些优点?
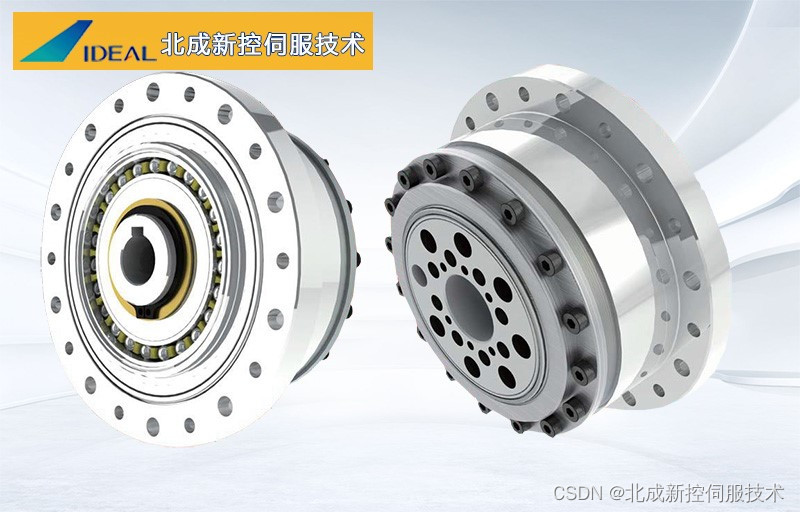
一、什么是谐波减速机? 谐波减速装置最早期被叫做“strain wave gearing”,直译过来为“应变波齿轮”。其后被HarmonicDrive Systems 公司大规模商业实用化后,经过二次翻译后,中文名称才将其称为“谐波齿轮传动”。 谐波减速机是一种广泛应用于自动化设备、机器人、精密仪器等领域的重要传动部件。谐波减速机是由刚轮、柔轮、波发生器三大核心构件组成,波发生器装配上柔性轴承

启动gazebo harmonic
ros2 launch ros_gz_sim gz_sim.launch.py gz_version:=8 如果不输入gz_version:=8,默认就是6,启动的就是默认版本ign版本 左边那个是8,右边那个是6
Harmonic Drive哈默纳科减速机旋转方向和减速比
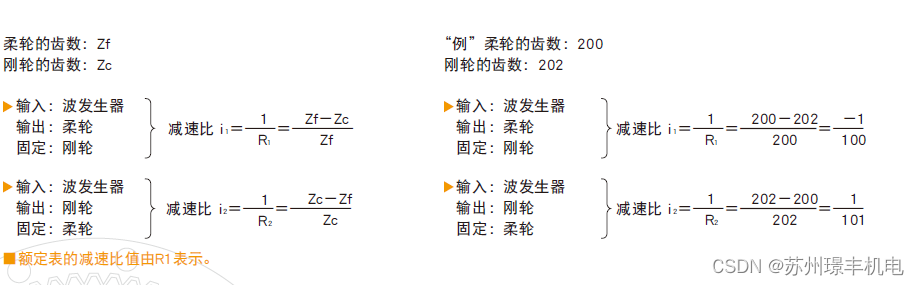
Harmonic Drive哈默纳科减速机是一款广泛应用于工业生产中的机械设备,通过减速旋转运动来降低机器的转速和输出功率,从而实现精准的调节和控制。哈默纳科减速机的结构紧凑,体积小,重量轻,安装方便,维护简单,使用寿命长,广泛应用于工业机器人、仿人机器人、半导体液晶生产装置、光伏设备、光学仪器、医疗设备、精密机床等行业中。在使用Harmonic Drive哈默纳科减速机时,我们需要了解它的旋转方

Harmonic Drive哈默纳科执行元件特点
为了保证伺服电动机及步进电动机等控制用电动机的优异控制性能,组装到电动机中的减速机要求具备高转矩/质量比、强大的角度传动精度、低齿隙等特性。组装有Harmonic Drive的执行元件凭借Harmonic Drive的优异性能,在不破坏电动机控制性能的情况下能够获得高减速以及高分辨率。 Harmonic Drive哈默纳科执行元件特点: 小型化、高转矩化 组装了减速机的执行元件的输

Harmonic日本哈默纳科谐波减速机的8大优点
Harmonic日本哈默纳科谐波减速机被广泛应用于机器人、航空航天、能源、航海、造船、仿生器械、常用军械、仪表、电子设备、交通运输、石油化工器械、防止器械、农业器械、医疗器械等领域,谐波减速机的特点决定了它在这些领域的特殊地位,Harmonic哈默纳科谐波减速机有哪些优点呢? 1.减速比高 单级同轴可获得1/30~1/320的高减速比。结构、构造简单,却能实现高减速比装置。 2.
Harmonic Number (II) LightOJ - 1245
求f(n)=n/1+n/2…n/n,其中n/i保留整数 f(n)这个函数刚好关于y=x对称,对称点位sqrt(n); 所以ans2-nn就可以求出来了 #include<stdio.h>#include<cmath>#include<algorithm>#include<iostream>#include<string.h>using namespace std;typedef lo