本文主要是介绍Harmonic Drive哈默纳科减速机旋转方向和减速比,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Harmonic Drive哈默纳科减速机是一款广泛应用于工业生产中的机械设备,通过减速旋转运动来降低机器的转速和输出功率,从而实现精准的调节和控制。哈默纳科减速机的结构紧凑,体积小,重量轻,安装方便,维护简单,使用寿命长,广泛应用于工业机器人、仿人机器人、半导体液晶生产装置、光伏设备、光学仪器、医疗设备、精密机床等行业中。在使用Harmonic Drive哈默纳科减速机时,我们需要了解它的旋转方向和减速比,以确保其正常运转。

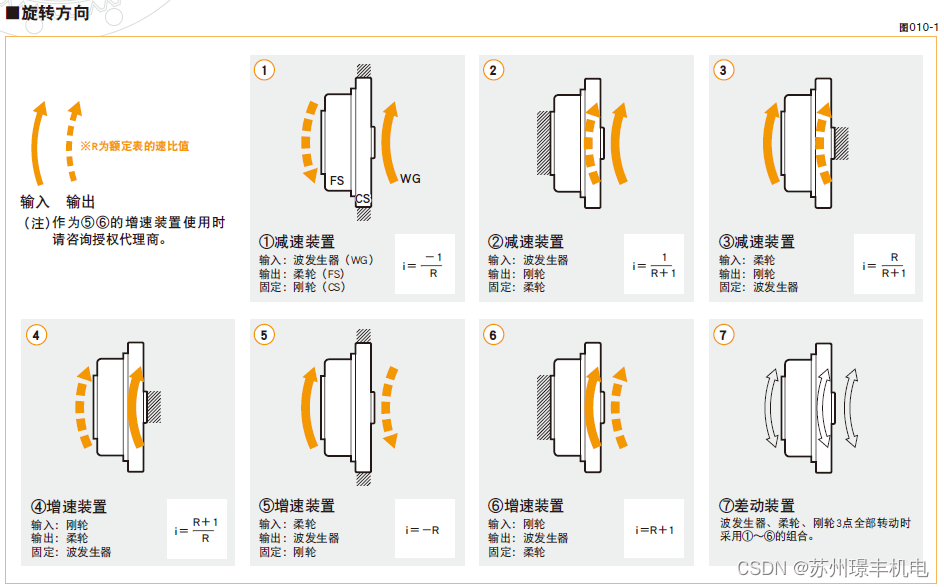
一、哈默纳科减速机-杯型
杯型Harmonic Drive的旋转方向和减速比如下所示。此外,杯型Harmonic Drive包括以下各系列,CSG、CSF、CSD、CSF-mini、CSF-GH
旋转方向
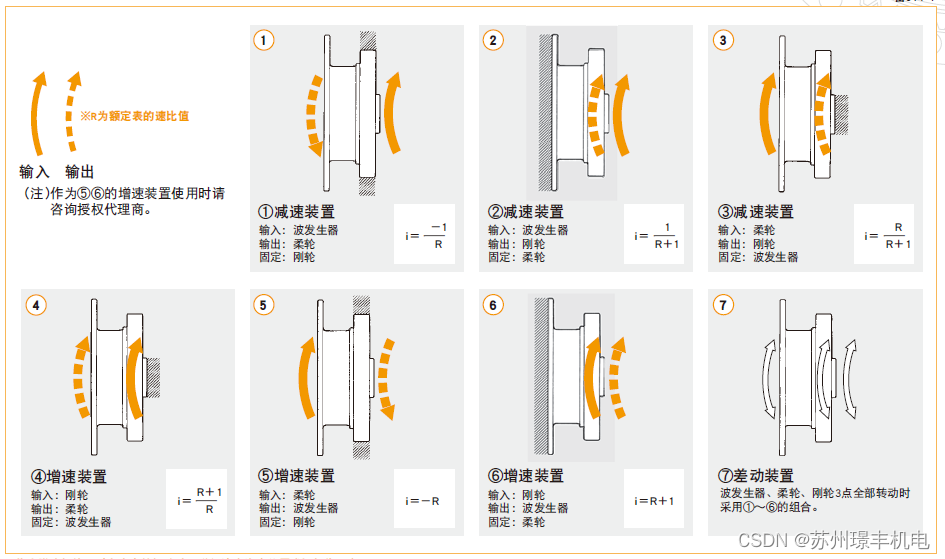
二、哈默纳科减速机-礼帽型
礼帽型Harmonic Drive的旋转方向和减速比如下所示。此外,礼帽型Harmonic Drive包括以下各系列,SHG、SHF、SHD
旋转方向
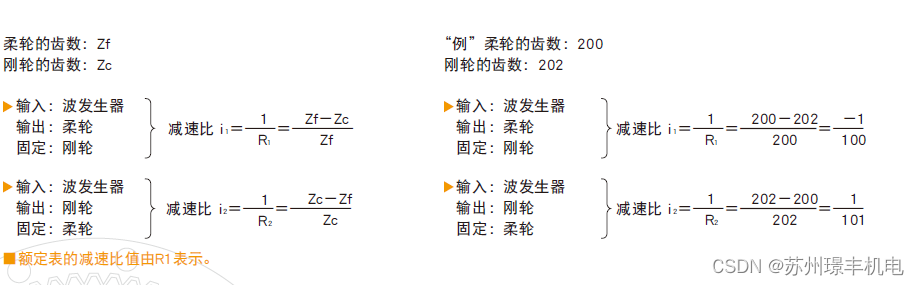
三、哈默纳科减速机减速比
Harmonic Drive的减速比由柔轮和刚轮的齿数决定。
这篇关于Harmonic Drive哈默纳科减速机旋转方向和减速比的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








![[SWPUCTF 2021 新生赛]web方向(一到六题) 解题思路,实操解析,解题软件使用,解题方法教程](https://i-blog.csdnimg.cn/direct/bcfaab8e5a68426b8abfa71b5124a20d.png)
